






摘要:
手机软件是“蓝牙调试器”,可以自己设计gui界面。我将在代码后面介绍如何创建gui界面。
蓝牙波特率9600。
单片机采用USART3。PB10连接蓝牙的RX,PB11连接蓝牙的TX。蓝牙是5v供电(3.3v也可以)。
下面是代码
Serial.c
#include "Serial.h"
//接收
#define E_START 0 //准备成功
#define E_OK 1 //成功
#define E_FRAME_HEADER_ERROR 2 //包头错误
#define E_FRAME_RTAIL_ERROR 3 //包尾错误
#define LINE_LIN 12 //数据长度
#define HEADER 0xA5 //包头
#define TAIL 0x5A //包尾
//发送
#define USART_TX_LEN 14 //数据包大小
uint8_t USART_TX_BUF[USART_TX_LEN]; //数据包缓存区
uint8_t uart_flag; //接收标志
vu8 RX_lanya[12]; //接收大小
extern int test_number;
uint8_t Serial_RxData;
uint8_t Serial_RxFlag;
void Serial_Init(void) //初始化
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
// GPIO_PinRemapConfig(GPIO_PartialRemap_USART3,ENABLE);//USART3完全重映射
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //TX 需要连接RX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; //RX 需要连接TX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600; //注意波特率要和蓝牙模块匹配 38400 JDY31-SPP 115200
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART3, &USART_InitStructure);
//配置中断
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);
// NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART3, ENABLE);
}
void Serial_SendByte(uint8_t Byte) //发送字节
{
USART_SendData(USART3, Byte);
while (USART_GetFlagStatus(USART3, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length) //发送数组
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String) //发送字符串
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length) //发送数字
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
//int fputc(int ch, FILE *f) //移植printf
//{
// Serial_SendByte(ch); //与usart文件里的重定义重复注释掉
// return ch;
//}
void Serial_Printf(char *format, ...) //移植printf
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
uint8_t Serial_GetRxData(void)
{
return Serial_RxData;
}
//和手机相关联。
/*接收数据*/
void get_slave_data(uint8_t data)
{
static uint8_t uart_num=0;
RX_lanya[uart_num++]=data; //?
if(1==uart_num)
{
//接收到第一个字节不是0xA5,包头错误
if(0XA5!=RX_lanya[0])
{
uart_num=0;
uart_flag=E_FRAME_HEADER_ERROR;
}
}
if(LINE_LIN==uart_num)
{
uart_flag=E_OK;
//接收到最后一个字节是0X5A
if(0X5A==RX_lanya[LINE_LIN-1])
{
uart_flag=E_OK;
}
else //接收到的最后一个字节不为ox5A,包尾错误
{
uart_flag=E_FRAME_RTAIL_ERROR;
}
uart_num=0;
}
}
int key1=0,key2=0,key3=0,key4=0,key5=0;
/*解析数据*/
/*数据包构成:包头(1字节)+字节变量(1字节)+4个段整形变量(共8个字节)+校验位(1字节)+包尾(1字节),共12个字节*/
void lanya_receive(void)
{
key1=RX_lanya[1];
key2=((int)RX_lanya[3]<<8)|RX_lanya[2];
key3=((int)RX_lanya[5]<<8)|RX_lanya[4];
key4=((int)RX_lanya[7]<<8)|RX_lanya[6];
key5=((int)RX_lanya[9]<<8)|RX_lanya[8];
}
//发送数据
//计算校验位
uint8_t checksum(void)
{
uint8_t checksum = 0;
for (int i = 1; i <= (USART_TX_LEN-3); ++i)
{
checksum += USART_TX_BUF[i];
}
checksum &= 0xff;
return checksum;
}
//数据类型转变
void Int_to_Byte(int i,uint8_t *byte)
{
unsigned long longdata = 0;
longdata = *(unsigned long*)&i;
byte[3] = (longdata & 0xFF000000) >> 24;
byte[2] = (longdata & 0x00FF0000) >> 16;
byte[1] = (longdata & 0x0000FF00) >> 8;
byte[0] = (longdata & 0x000000FF);
}
void Float_to_Byte(float f,uint8_t *byte)
{
unsigned long longdata = 0;
longdata = *(unsigned long*)&f;
byte[3] = (longdata & 0xFF000000) >> 24;
byte[2] = (longdata & 0x00FF0000) >> 16;
byte[1] = (longdata & 0x0000FF00) >> 8;
byte[0] = (longdata & 0x000000FF);
}
void Short_to_Byte(short s,uint8_t *byte)
{
byte[1] = (s & 0xFF00) >> 8;
byte[0] = (s & 0xFF);
}
//组合数据包
/*数据包构成:包头(1字节)+1个字节变量(1字节)+1个短整形变量(2个字节)+1个整形变量(4个字节)+1个浮点形变量(4个字节)+校验位(1字节)+包尾(1字节),共14个字节*/
void lanya_transmit(void)
{
char x = 0x10; //-128~127
short y = 0x02; //-32768~32767
int z = 0x09; //4字节
float f = 20.5; //4字节
USART_TX_BUF[0] = HEADER; //包头
USART_TX_BUF[1] = (uint8_t)x;
Short_to_Byte(y,&USART_TX_BUF[2]);
Int_to_Byte(z,&USART_TX_BUF[4]);
Float_to_Byte(f,&USART_TX_BUF[8]);
//计算校验和
USART_TX_BUF[12] = checksum();
USART_TX_BUF[13] = TAIL; //包尾
//通过串口1发送
Serial_SendArray(USART_TX_BUF,14);
}
void USART3_IRQHandler(void)
{
if(USART_GetITStatus(USART3,USART_IT_RXNE)!=RESET)
{
USART_ClearITPendingBit(USART3,USART_IT_RXNE);
Serial_RxData = USART_ReceiveData(USART3); //返回 USART2 最近接收到的数据
Serial_RxFlag = 1;
get_slave_data(Serial_RxData); //获取数据
if(uart_flag==1)
{
uart_flag=0;
lanya_receive(); //数据解析
}
}
}
Serial.h
#ifndef __SERIAL_H
#define __SERIAL_H
#include "sys.h"
#include <stdio.h>
#include <stdarg.h>
extern int key1,key2,key3,key4,key5;
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
uint8_t Serial_GetRxFlag(void);
uint8_t Serial_GetRxData(void);
//和手机相关联 GUI
void get_slave_data(uint8_t data);
void lanya_receive(void);
uint8_t checksum(void);
void Int_to_Byte(int i,uint8_t *byte);
void Float_to_Byte(float f,uint8_t *byte);
void Short_to_Byte(short s,uint8_t *byte);
void lanya_transmit(void);
#endif
main.c
#include "delay.h"
#include "sys.h"
#include "oled.h"
#include "bmp.h"
#include "Serial.h"
//HC-05波特率匹配9600
//引脚对应
//手机软件GBK编码
int main(void)
{
delay_init();
OLED_Init();
OLED_ColorTurn(0);//0正常显示,1 反色显示
OLED_DisplayTurn(0);//0正常显示 1 屏幕翻转显示
OLED_Clear();
Serial_Init();
uint8_t Direction;
while(1)
{
if (Serial_GetRxFlag() == 1) //判断是否收到数据
{
Direction = Serial_GetRxData(); //读取数据
OLED_ShowChar(0,0,Direction,16,1);
OLED_Refresh();
Serial_SendByte(Direction); //将数据回传到电脑
}
}
}
以上代码可以实现基础的蓝牙收发。实现简单的控制效果。
下面来讲一下蓝牙调试器的GUI制作。
1、首先打开蓝牙调试器
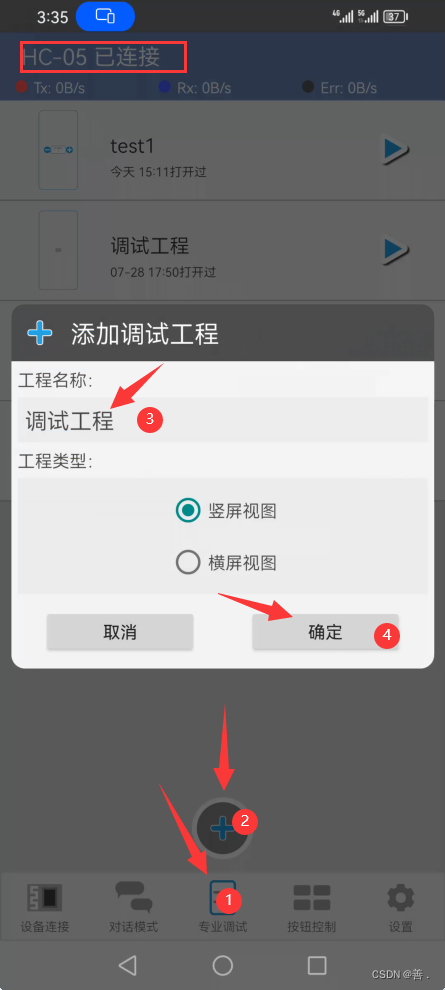
2、打开后刷新一下,连接好蓝牙模块HC-05,连接后左上角会显示已连接

3、选择下方的“专业调试”,新建工程,确定
4、工程创建好后我们要根据我们的需要进行通信设置。我以上面的代码为例
发送数据包:
/*解析数据*/
/*数据包构成:包头(1字节)+字节变量(1字节)+4个段整形变量(共8个字节)+校验位(1字节)+包尾(1字节),共12个字节*/
(蓝牙的发送对应单片机的接收,所以注释是解析数据)
接收数据包:
//组合数据包
/*数据包构成:包头(1字节)+1个字节变量(1字节)+1个短整形变量(2个字节)+1个整形变量(4个字节)+1个浮点形变量(4个字节)+校验位(1字节)+包尾(1字节),共14个字节*/



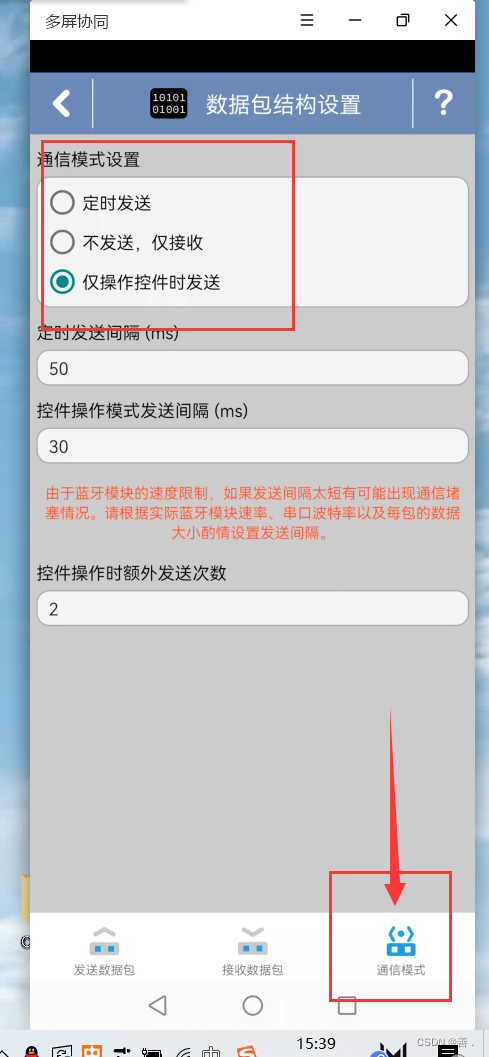
最后是通细腻模式的设置,选择“仅操作控件时发送”
在数据包结构设置里的右上角“?”。打开可以看到如下内容。

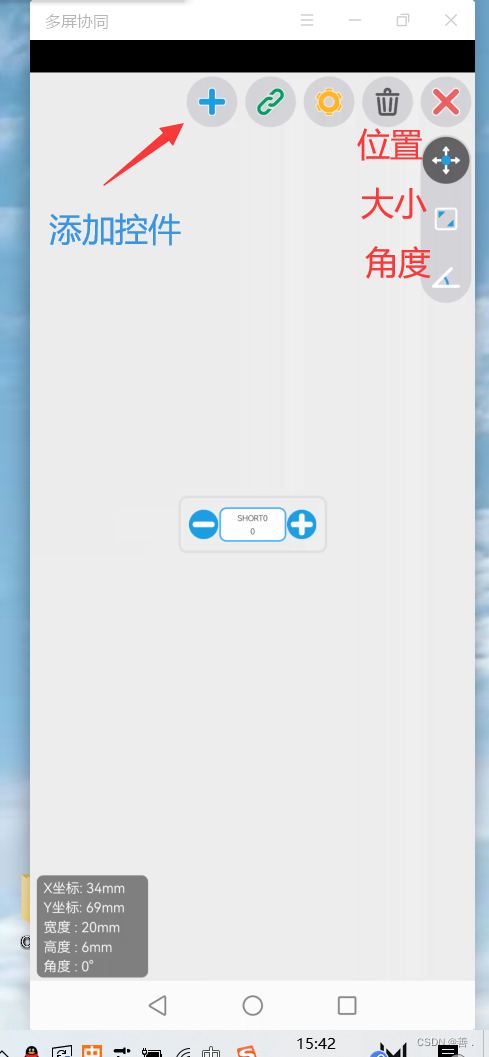
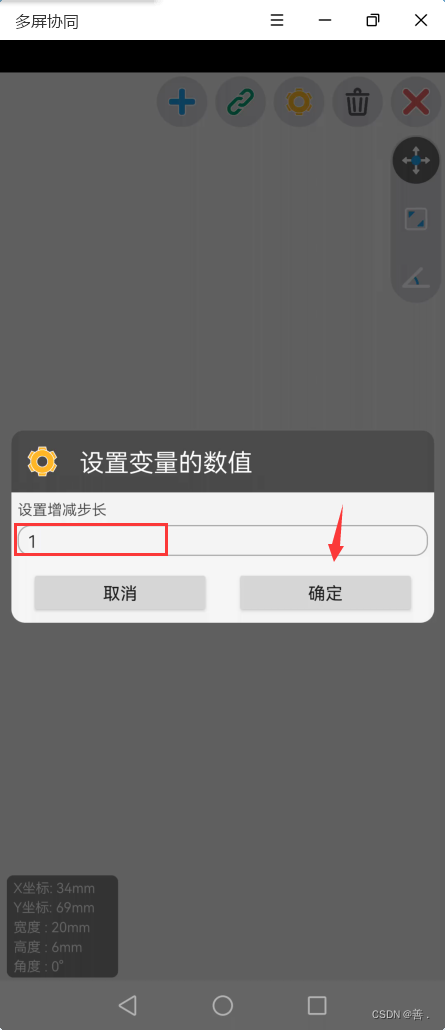
5、编辑控件,根据需要选择适合的控件,并设置好参数。


6、到此蓝牙手机发送部分就完成啦,可以打开观察实验现象了。

//主函数
int main(void)
{
delay_init();
OLED_Init();
OLED_ColorTurn(0);//0正常显示,1 反色显示
OLED_DisplayTurn(0);//0正常显示 1 屏幕翻转显示
OLED_Clear();
Serial_Init();
uint8_t Direction;
while(1)
{
OLED_ShowNum(16,16,key2,1,16,1); //这里的key2对应short0
OLED_Refresh();
if (Serial_GetRxFlag() == 1) //判断是否收到数据
{
Direction = Serial_GetRxData(); //读取数据
OLED_ShowChar(0,0,Direction,16,1);
OLED_Refresh();
Serial_SendByte(Direction); //将数据回传到电脑
}
}
}
7、单片机发送数据手机接收
修改下面的数据位你需要的变量。
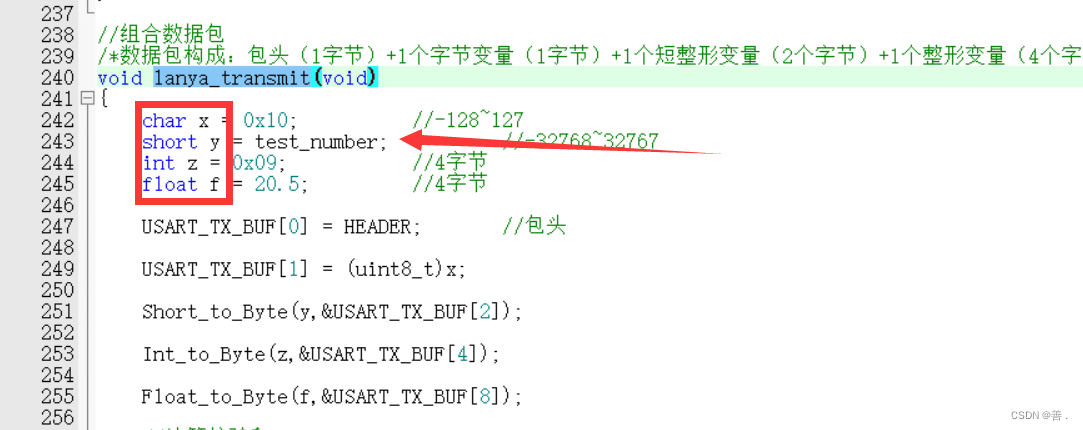
这里我将发送数据包的short位设置为test_number。
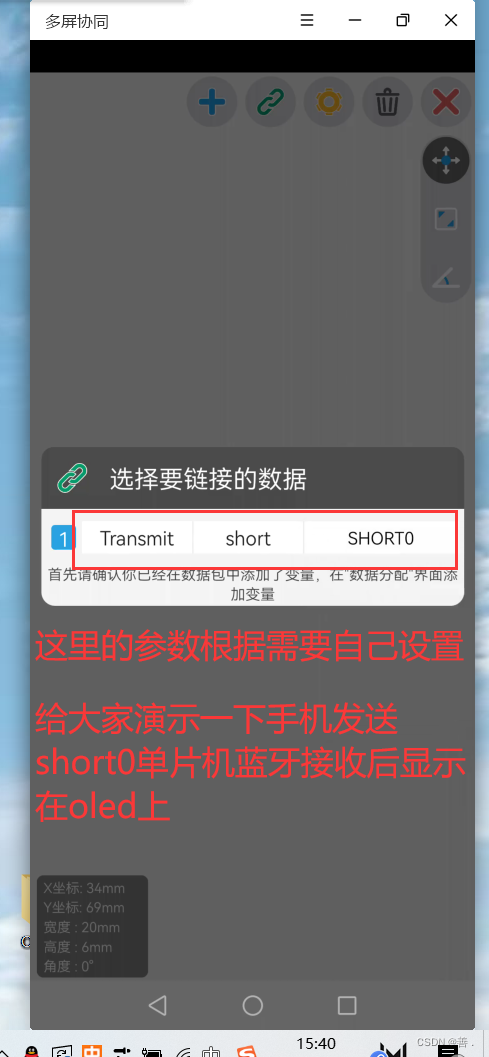
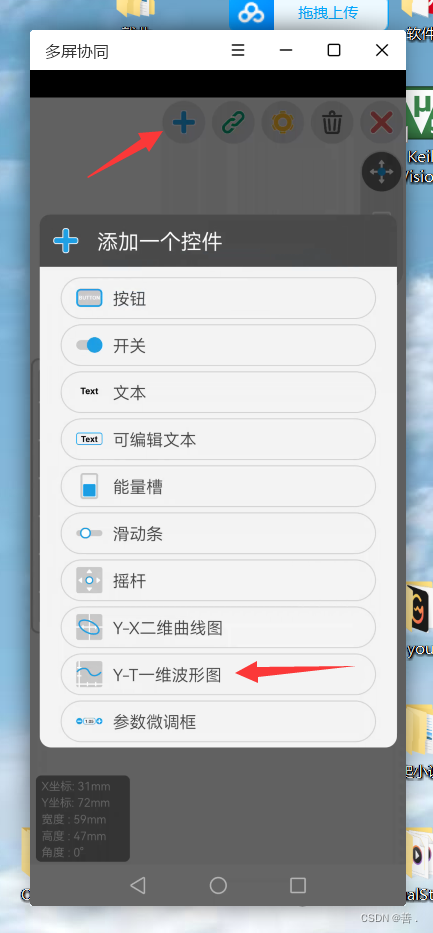
添加下面的控件:
选择链接的数据

调整合适的大小
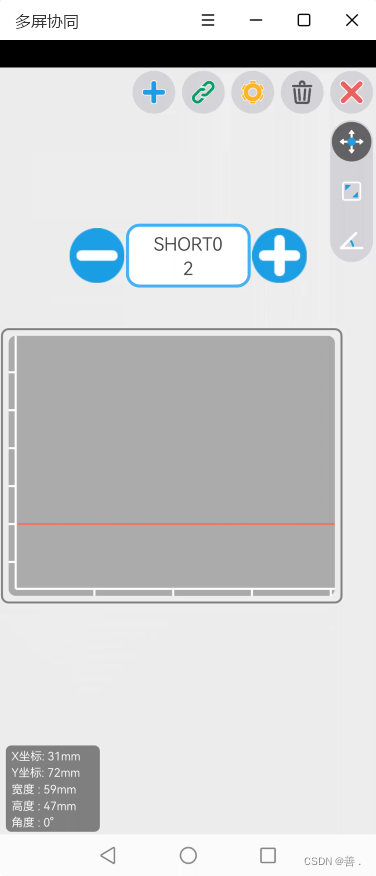
实验现象:

发送一个锯齿波。
代码。主要是修改一下main函数。另外记得在serial.c里声明extern int test_number;。
main.c
#include "delay.h"
#include "sys.h"
#include "oled.h"
#include "bmp.h"
#include "Serial.h"
//HC-05波特率匹配9600
//引脚对应
//手机软件GBK编码
//实现收发
//加入gui
int test_number=0;
int array[11] = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10};
int key_1=0;
int main(void)
{
delay_init();
OLED_Init();
OLED_ColorTurn(0);//0正常显示,1 反色显示
OLED_DisplayTurn(0);//0正常显示 1 屏幕翻转显示
OLED_Clear();
Serial_Init();
// test_0(); //开机动画
uint8_t Direction;
while(1)
{
lanya_transmit();
if(key_1==0)
{
test_number++;
if(test_number==60)
{
key_1=1;
}
}
else if(key_1==1)
{
test_number--;
if(test_number==0)
{
key_1=0;
}
}
OLED_ShowNum(16,16,key2,1,16,1);
OLED_Refresh();
if (Serial_GetRxFlag() == 1) //判断是否收到数据
{
Direction = Serial_GetRxData(); //读取数据
OLED_ShowChar(0,0,Direction,16,1);
OLED_Refresh();
Serial_SendByte(Direction); //将数据回传到电脑
}
}
}
sys.h
#ifndef __SYS_H
#define __SYS_H
#include "stm32f4xx.h"
//
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK STM32F407开发板
//系统时钟初始化
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//创建日期:2014/5/2
//版本:V1.0
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2014-2024
//All rights reserved
//********************************************************************************
//修改说明
//无
//
//0,不支持ucos
//1,支持ucos
#define SYSTEM_SUPPORT_OS 0 //定义系统文件夹是否支持UCOS
//位带操作,实现51类似的GPIO控制功能
//具体实现思想,参考<<CM3权威指南>>第五章(87页~92页).M4同M3类似,只是寄存器地址变了.
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
#define PHout(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PHin(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入
#define PIout(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PIin(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入
//以下为汇编函数
void WFI_SET(void); //执行WFI指令
void INTX_DISABLE(void);//关闭所有中断
void INTX_ENABLE(void); //开启所有中断
void MSR_MSP(u32 addr); //设置堆栈地址
#endif
sys.c
#include "sys.h"
#include "Motor_T.h"
#include "Motor_S.h"
#include "Interpolation_Linear.h"
#include "Interpolation_Arc.h"
extern inter_pol_def_arc g_pol_par_arc; //圆弧插补模式
extern st_motor_status_def g_motor_sta_linear; //直线插补 运动模式
extern inter_pol_def g_pol_par_linear; //直线插补模式
extern st_motor_status_def_arc g_motor_sta_arc; //圆弧插补 运动模式
//THUMB指令不支持汇编内联
//采用如下方法实现执行汇编指令WFI
__asm void WFI_SET(void)
{
WFI;
}
//关闭所有中断(但是不包括fault和NMI中断)
__asm void INTX_DISABLE(void)
{
CPSID I
BX LR
}
//开启所有中断
__asm void INTX_ENABLE(void)
{
CPSIE I
BX LR
}
//设置栈顶地址
//addr:栈顶地址
__asm void MSR_MSP(u32 addr)
{
MSR MSP, r0 //set Main Stack value
BX r14
}
void TIM3_IRQHandler(void)
{
//T
speed_decision_T();
// S
speed_decision_S();
}
void TIM2_IRQHandler(void)
{
// g_pol_par_linear.moving_mode
if(g_pol_par_linear.moving_mode == LINE)
{
straight_speed_decision();
}
else if(g_pol_par_arc.moving_mode == ARC)
{
circle_speed_decision();
}
}
8、工程文件下载
看到这里了,对于有需要的同学可以到github上下载工程文件。
打开github需要下载加速器,下面是加速器的下载连接。
 https://blog.csdn.net/m0_69752994/article/details/133298751
https://blog.csdn.net/m0_69752994/article/details/133298751我在CSDN的资源里也上传了工程文件,目前正在审核,审核通过后会发布链接在评论区。

















 9917
9917

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









