









此前出了目标检测算法改进专栏,但是对于应用于什么场景,需要什么改进方法对应与自己的应用场景有效果,并且多少改进点能发什么水平的文章,为解决大家的困惑,此系列文章旨在给大家解读发表高水平学术期刊中的 SCI论文,并对相应的SCI期刊进行介绍,帮助大家解答疑惑,助力科研论文投稿。解读的系列文章,本人会进行 创新点代码复现,有需要的朋友可关注私信我获取。 这篇文章也是简单的3个模块叠加但是还是能够投中,说明顶刊不仅仅看创新点也看其他方面的东西,也想投稿SCI顶刊的朋友需要辅导的可以联系我。

一、摘要
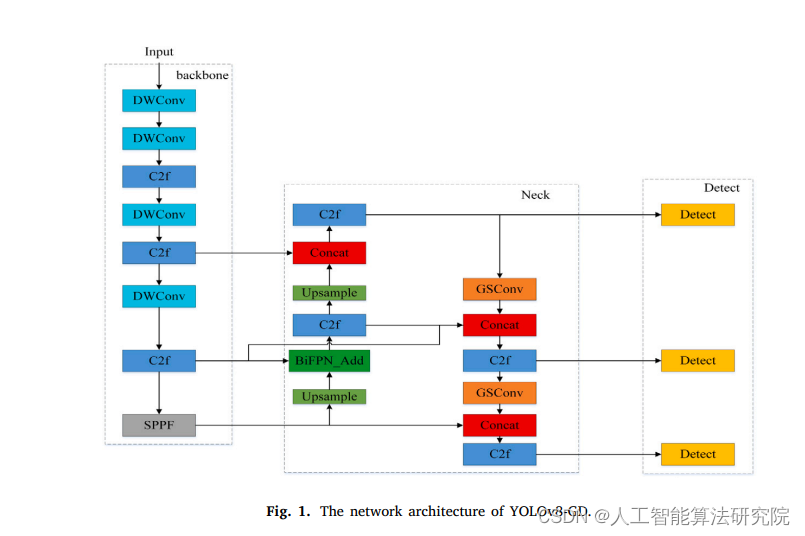
光伏缺陷检测是建筑分布式光伏系统研究的一个重要方面。现有的基于深度学习的光伏缺陷检测模型,如YOLOv5和YOLOv8,具有显著提高光伏缺陷检测精度。但是,这些模型太大了,而且它们的特征提取能力不足,导致检测效率低下,无法应对随着缺陷的不断演变。因此,本研究提出了一种准确、轻量级的YOLOv8GD 算法。该算法是YOLOv8的改进版本,其中DW-Conv(DepthWise-Conv) 应用于 YOLOv8 骨干网。此外,卷积被替换为GSConv(Group-shuffle Conv)和BiFPN(双向特征金字塔网络)结构被添加到建筑。
二、网络模型及核心创新点
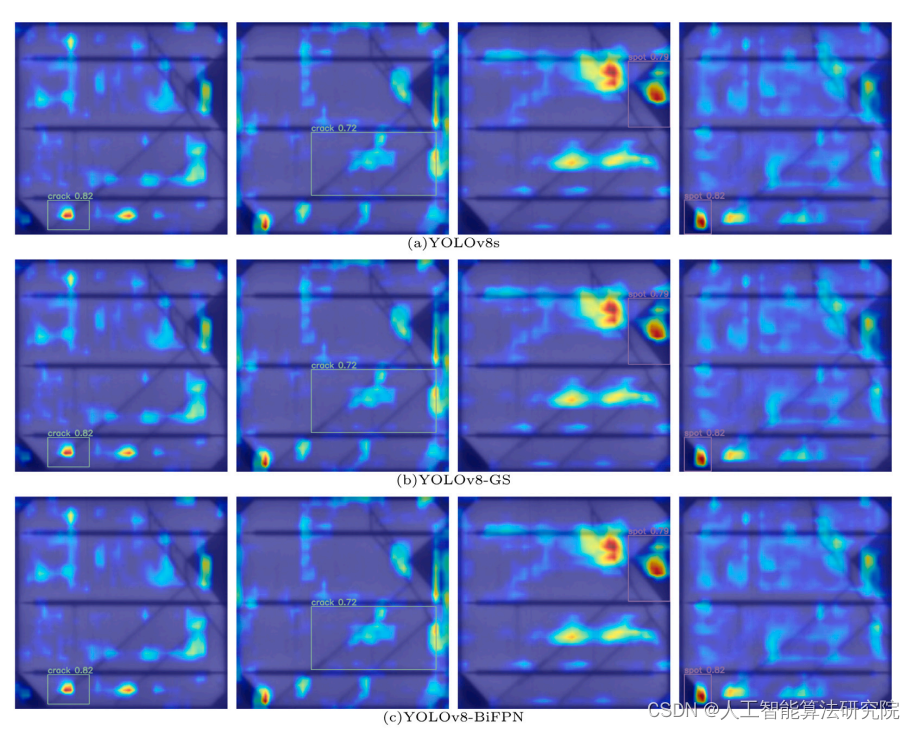
三、实验效果(部分展示)
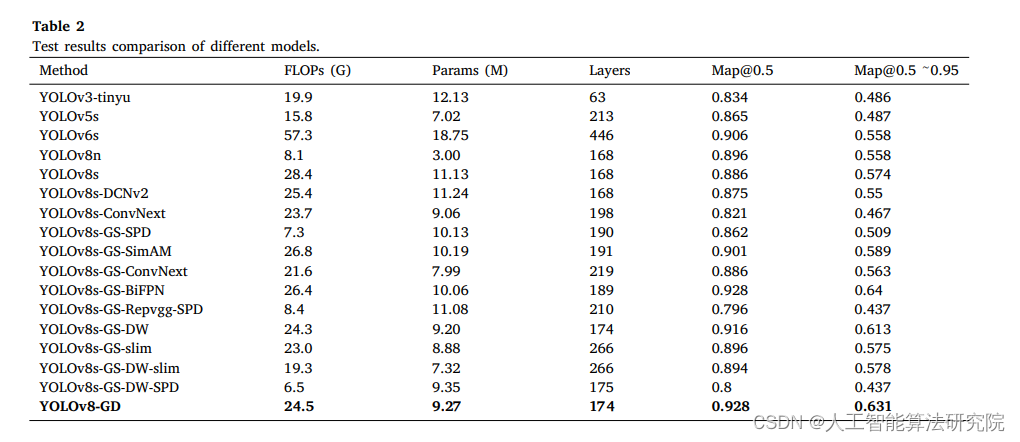
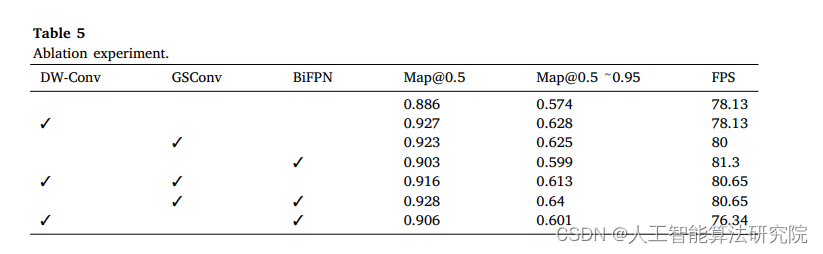
做了大量的对比实验。工作量较大。
四、实验结论
本研究提出了一种基于改进缺陷检测算法的方法。 YOLOv8 用于检测稀疏和难以区分的分布式
光伏缺陷;该算法主要包括 DW-Conv、GSConv 和BiFPN结构。
注:论文原文出自 Improved YOLOv8-GD deep learning model for defect detection in electroluminescence images of solar photovoltaic modules. 本文仅用于学术分享,如有侵权,请联系后台作删文处理。
解读的系列文章,本人已进行创新点代码复现,有需要的朋友欢迎关注私信我获取❤ 。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











