






文章目录
一、一个C51程序设计和仿真(流水灯)
(一)利用Proteus绘制原理图
创建一个新工程后,将AT89C51芯片、LED-YELLOW、RES添加到元件列表,摆放好元件后连接管脚
可以将RES下方的10k改成300可以使灯变得更亮

(二)利用Keil编写51程序
#include<reg51.h>
#include<intrins.h>
void delay_ms(int a)
{
int i,j;
for(i=0;i<a;i++)
{
for(j=0;j<1000;j++) _nop_();
}
}
void main(void)
{
while(1)
{
P0=0xfe;
delay_ms(50);
P0=0xfd;
delay_ms(50);
P0=0xfb;
delay_ms(50);
P0=0xf7;
delay_ms(50);
P0=0xef;
delay_ms(50);
P0=0xdf;
delay_ms(50);
P0=0xbf;
delay_ms(50);
P0=0x7f;
delay_ms(50);
}
}
点击Target1旁边的魔法棒弹出下图的框,点击Output选择如下,点击确定
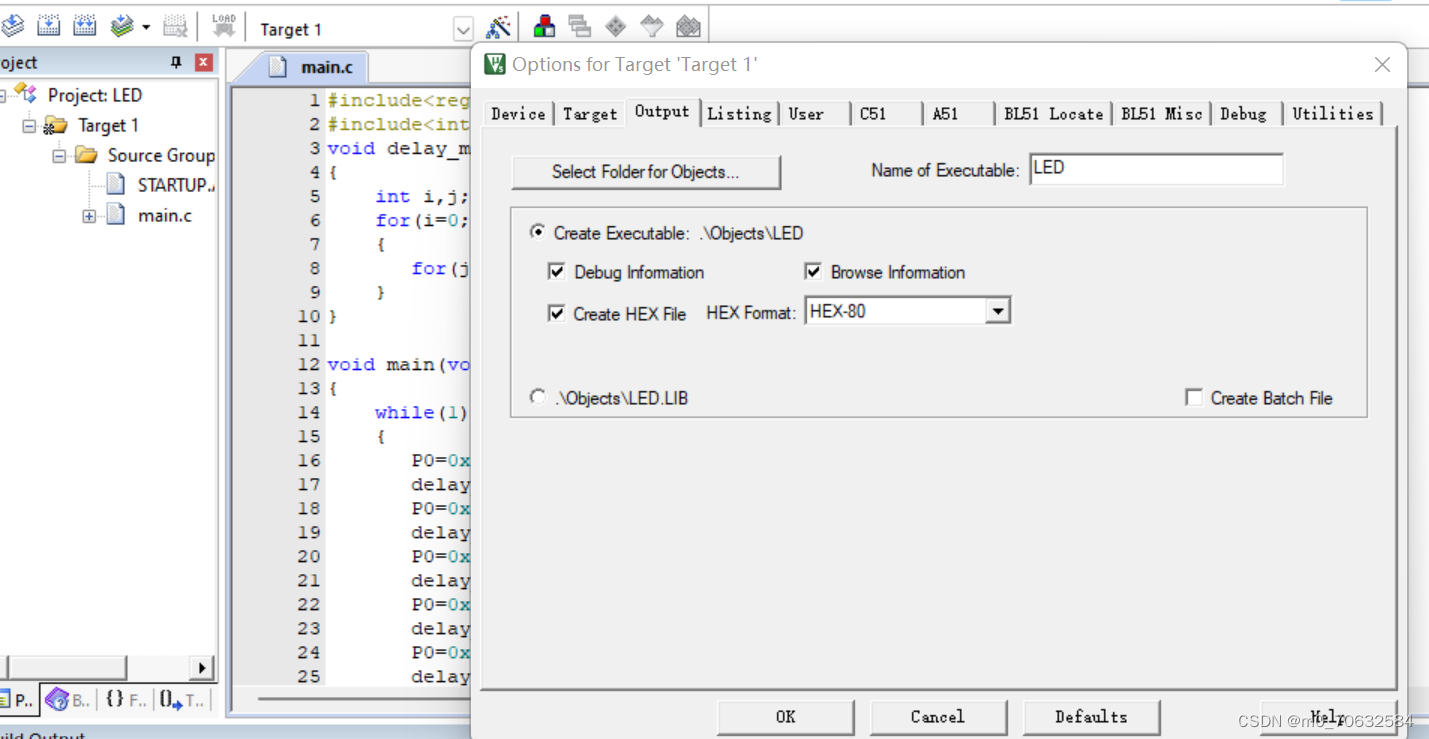
点击单向编译生成.hex文件,这一步至关重要.
(三)开始仿真
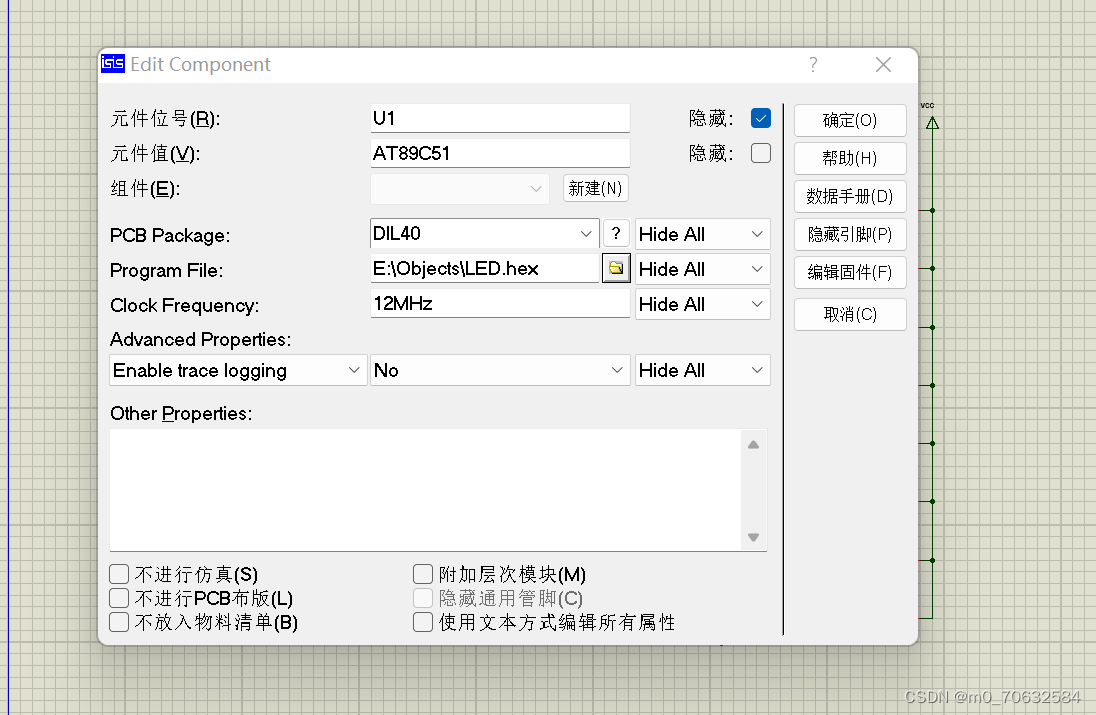
双击AT89C51芯片弹出下图所示的框,在Program File这个位置选择上个步骤所生成的.hex文件,确定
开始仿真,运行仿真
二、使用MDK软件进行一个STM32简单程序的编译(LED灯闪烁)
(一)环境配置
https://www.keil.arm.com/packs/stm32f1xx_dfp-keil/boards/\
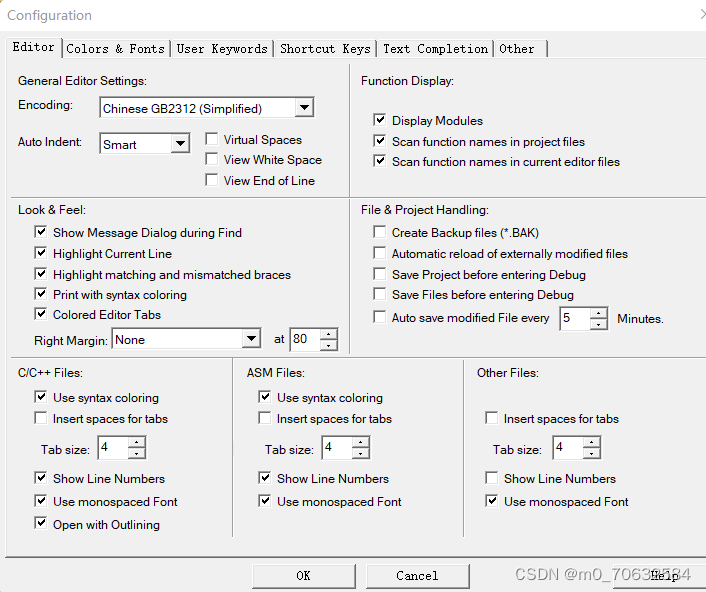
(二)keil的简单设置
点击编辑(Edit),选择Configuration,弹出如下框图,将Encoding选择如下图所示,将C/C++Files的Tab size设置为4.
(三)一个stm32简单程序的编译(LED闪烁)
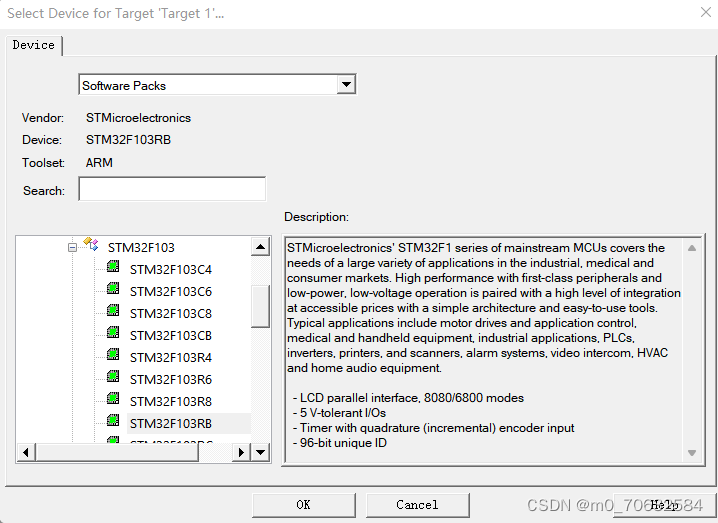
1.新建工程
(1)勾选STM32F103RB,保存。
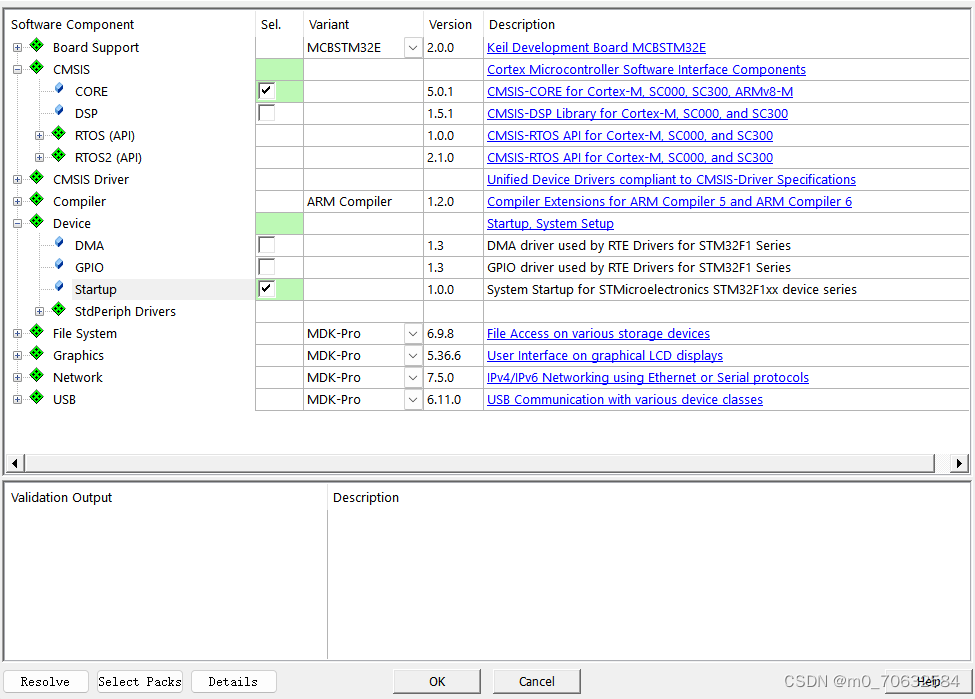
(2)勾选相应选项,点击OK,这样工程创建完毕。
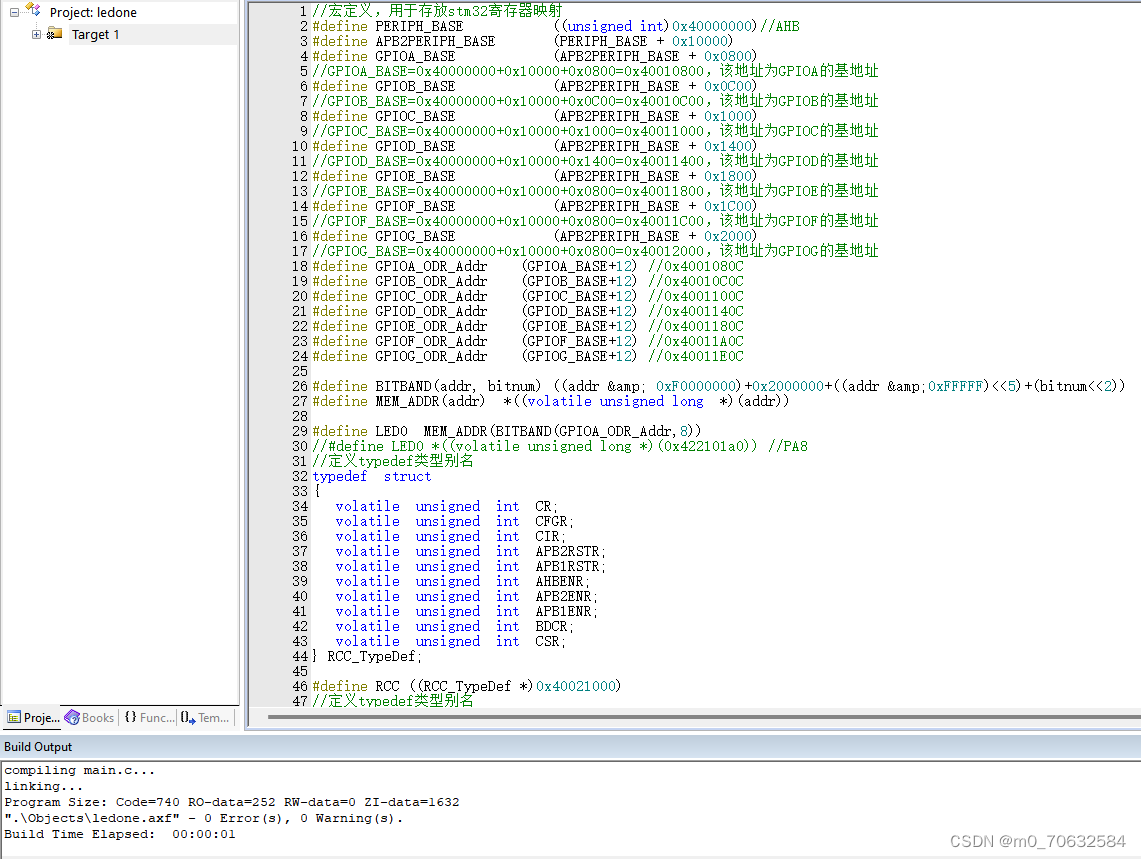
2.新建main.c文件
//宏定义,用于存放stm32寄存器映射
#define PERIPH_BASE ((unsigned int)0x40000000)//AHB
#define APB2PERIPH_BASE (PERIPH_BASE + 0x10000)
#define GPIOA_BASE (APB2PERIPH_BASE + 0x0800)
//GPIOA_BASE=0x40000000+0x10000+0x0800=0x40010800,该地址为GPIOA的基地址
#define GPIOB_BASE (APB2PERIPH_BASE + 0x0C00)
//GPIOB_BASE=0x40000000+0x10000+0x0C00=0x40010C00,该地址为GPIOB的基地址
#define GPIOC_BASE (APB2PERIPH_BASE + 0x1000)
//GPIOC_BASE=0x40000000+0x10000+0x1000=0x40011000,该地址为GPIOC的基地址
#define GPIOD_BASE (APB2PERIPH_BASE + 0x1400)
//GPIOD_BASE=0x40000000+0x10000+0x1400=0x40011400,该地址为GPIOD的基地址
#define GPIOE_BASE (APB2PERIPH_BASE + 0x1800)
//GPIOE_BASE=0x40000000+0x10000+0x0800=0x40011800,该地址为GPIOE的基地址
#define GPIOF_BASE (APB2PERIPH_BASE + 0x1C00)
//GPIOF_BASE=0x40000000+0x10000+0x0800=0x40011C00,该地址为GPIOF的基地址
#define GPIOG_BASE (APB2PERIPH_BASE + 0x2000)
//GPIOG_BASE=0x40000000+0x10000+0x0800=0x40012000,该地址为GPIOG的基地址
#define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C
#define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C
#define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C
#define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C
#define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define LED0 MEM_ADDR(BITBAND(GPIOA_ODR_Addr,8))
//#define LED0 *((volatile unsigned long *)(0x422101a0)) //PA8
//定义typedef类型别名
typedef struct
{
volatile unsigned int CR;
volatile unsigned int CFGR;
volatile unsigned int CIR;
volatile unsigned int APB2RSTR;
volatile unsigned int APB1RSTR;
volatile unsigned int AHBENR;
volatile unsigned int APB2ENR;
volatile unsigned int APB1ENR;
volatile unsigned int BDCR;
volatile unsigned int CSR;
} RCC_TypeDef;
#define RCC ((RCC_TypeDef *)0x40021000)
//定义typedef类型别名
typedef struct
{
volatile unsigned int CRL;
volatile unsigned int CRH;
volatile unsigned int IDR;
volatile unsigned int ODR;
volatile unsigned int BSRR;
volatile unsigned int BRR;
volatile unsigned int LCKR;
} GPIO_TypeDef;
//GPIOA指向地址GPIOA_BASE,GPIOA_BASE地址存放的数据类型为GPIO_TypeDef
#define GPIOA ((GPIO_TypeDef *)GPIOA_BASE)
void LEDInit( void )
{
RCC->APB2ENR|=1<<2; //GPIOA 时钟开启
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X00000003;
}
//粗略延时
void Delay_ms( volatile unsigned int t)
{
unsigned int i,n;
for (n=0;n<t;n++)
for (i=0;i<800;i++);
}
int main(void)
{
LEDInit();
while (1)
{
LED0=0;//LED熄灭
Delay_ms(500);//延时时间
LED0=1;//LED亮
Delay_ms(500);//延时时间
}
}
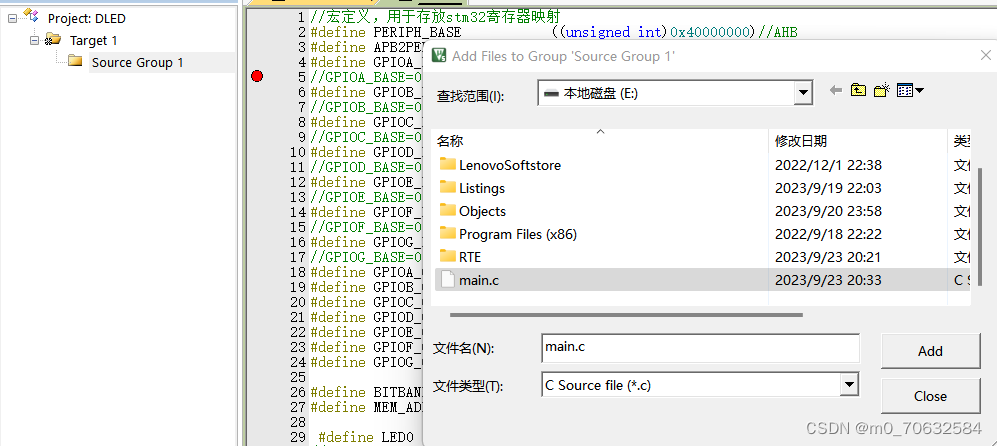
(1)将创建好的文件保存输入文件名main.c,点击保存,Text1文件变成main.c文件。

(2)右键单击Source Group 1,再点击Add Existing Files to Group…,在工程下添加main.c文件。
3.程序编译
进行编译,左下方显示0错误0警告,表示编译成功。
(四)stm32程序仿真调试
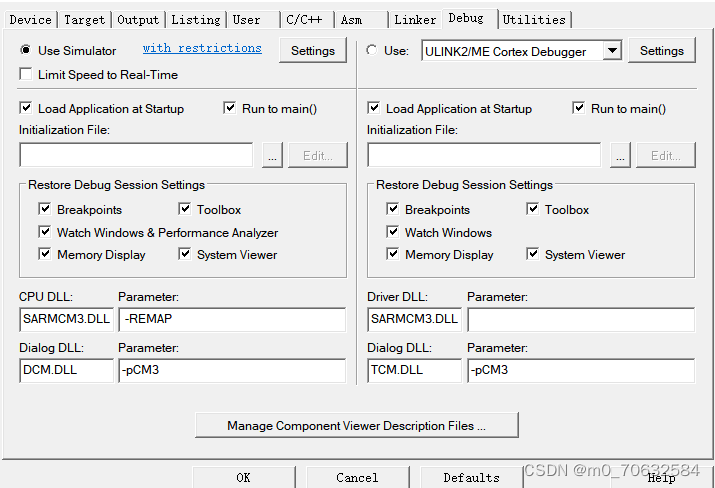
1.调试前设置
(1)点击魔法棒,在弹出的窗口点击Debug,勾选Use Simulator,再选择ULNK2/ME Cortex Debugger,点击Settings。
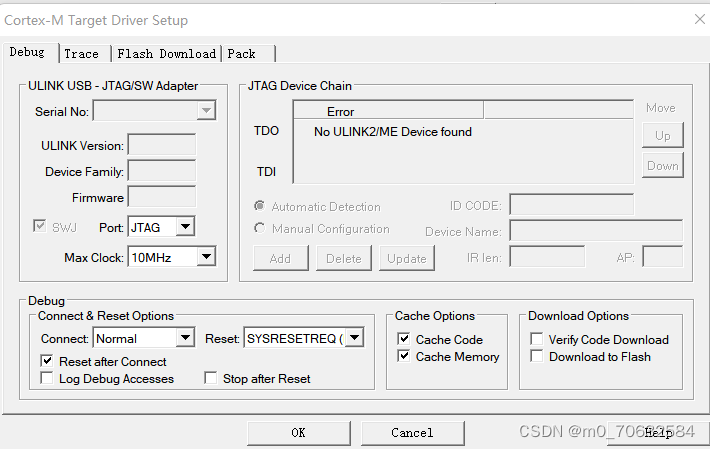
(2)确定Port是JTAG,Reset设置为Autodetect或SYSRESEETREQ,点击OK,返回上一级窗口,点击OK。
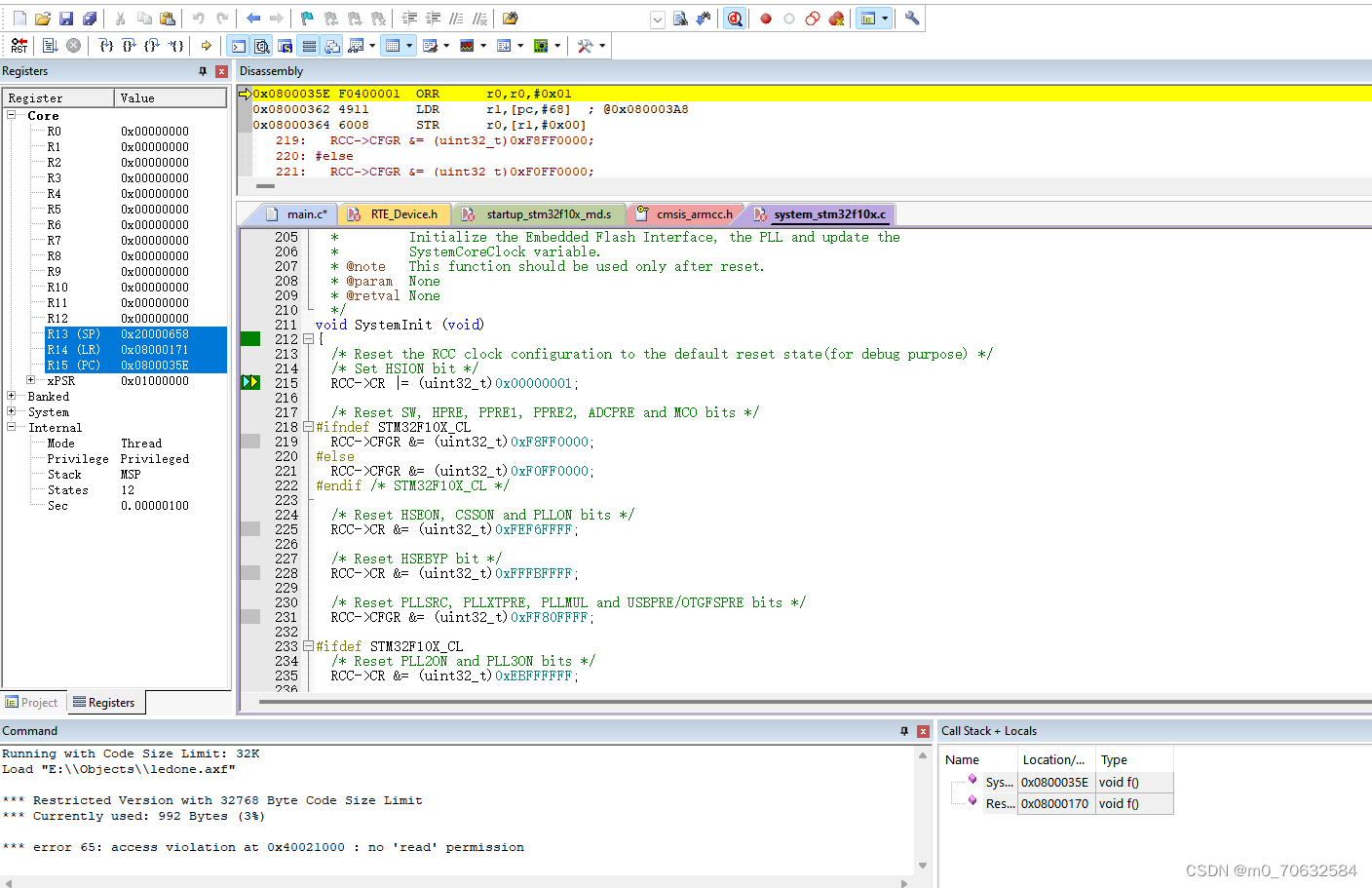
2.开始调试
点击带有红色d的放大镜开始调试,左边栏上方的四个大括号的部分就是仿真调试所需要的调试工具。
三、有关STM32F103系列芯片的地址映射和寄存器映射原理
(一)嵌入式C程序代码对内存(RAM)中各变量与对外部设备(寄存器—>对应相关管脚)的操作的相同与差别
对内存:通过控制总线发送数据请求并写入存储单元,通过同一通道来获取数据。在储存器的区域单元中,每一个单元对应不同的功能,根据其不同的功能给已经分配好的地址的内存单元取名。
对外部设备:通过地址,不同的寄存器有不同的地址,寄存器本身不具有地址信息,是通过储存器的映射给其分配地址。一般外设为加快处理速度都有自己的片内RAM,分出去的地址空间也就与片内RAM物理连接,CPU也能访问内存一样去访问外设的片内RAM。
(二)51单片机的LED点灯编程比STM32简单的原因
51单片机一般直接操作寄存器,STM32主操作库函数编程,二者的开发方式不同;
二者的性能不一样,51单片机是8位的,写代码时要考虑8个位置上的数值,STM32是32位的,写代码时要考虑32个位置上的数值,所以51单片机操作起来更简单;
点灯编程是单任务的项目,51单片机也更适合处理。一般多任务的项目才会采用功能更能强大的STM32。
四、关键字register和volatile
(一)register关键字
1.修饰符作用
register称为寄存器型,尽量让这个被修饰的变量存放在CPU的寄存器中供程序进行读写,因为它的值很少被修改,直接通过寄存器访问,就能提高程序的性能。
2.示例说明
不能对register变量取地址,因为寄存器不能通过地址直接访问,寄存器中没有地址的概念,地址是在内存中相关的。
register int a= 0;
printf("%d\n", a);
printf("%d\n", &a);
取地址就会出现报错
错误 C2103 寄存器变量上的"&"
register变量必须是能被CPU所接受的类型,意味着register变量必须是一个单个的值,并且长度应该小于或者等于整形的长度
#include<stdio.h>
int main(int argc, char *argv[])
{
register int a=10;
printf("a=%d\n",a);
return 0;
}
对于循环次数比较多的循环控制变量及循环体内反复使用的变量,均可以定义为寄存器变量。
int func(int n)
{
register int i,s=0;
for(i=0;i<=n;i++)
{
s=s+i;
}
return s;
}
还有一点就是只能使用于局部变量和函数形参,全局变量是非法的。
(二)关键字volatile
1.修饰符作用
防止编译器优化。作为指令关键字,确保本条指令不会因编译器的优化而省略,且要求每次直接读值。
2.示例说明
用volatile修饰变量或地址,相当于告诉编译器这个值会随时发生变化,每次使用都要去内存中重新读取它的值。
#include <stdio.h>
int main()
{
int i=10;
int a=i;
printf("i=%d",a);
——asm{
mov dword ptr [ebp-4],20h
}
int b=i;
printf("i=%d",b);
return 0;
}
程序输出如下:
i=10;
i=10;
采用volatile关键字修饰:
#include <stdio.h>
int main()
{
volatile int i=10;
int a=i;
printf("i=%d",a);
——asm{
mov dword ptr [ebp-4],20h
}
int b=i;
printf("i=%d",b);
return 0;
}
程序输出如下:
i=10;
i=32;
说明关键字volatile发挥了作用。
五、思考
本次实验主要是利用Proteus创建工程、原理图界面以及Keil软件来编译Hex文件,需要熟练使用Proteus和Keil,这也是51单片机的入门。重点是这两个软件的熟练使用,之后的过程自然就会很顺利。操作的主要内容是如何使用MDK软件来完成一个简单STM32的程序的编译,其重要条件是mdk5软件和stm32包的安装,需要熟悉mdk的开发环境,从而进行程序的编译和仿真。由于没有接入硬件设施只能先进行程序的编译和仿真测试。














 511
511











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









