










0 前言
🔥 这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是
🚩 基于PID控制的智能平衡车设计与实现
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:4分
- 工作量:4分
- 创新点:3分
🧿 选题指导, 项目分享:
1 简介
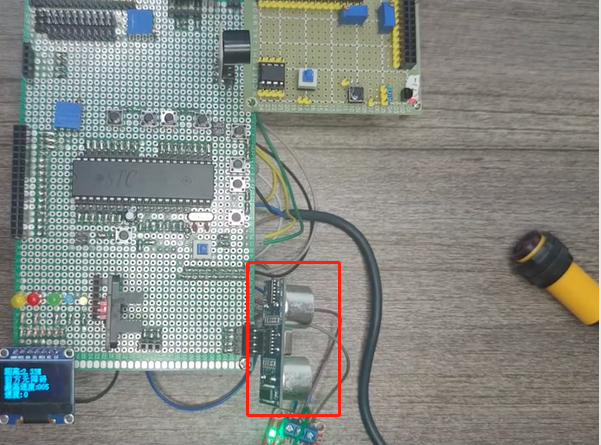
基于52单片机开发的防追尾系统,系统内使用HC-SR04超声检测模块检测车后障碍物的距离,并通过光电管识别前方是否有障碍物存在,如果前方有障碍物存在则会在OLED显示屏上显示“前方有障碍物”,测距模块的检测的距离数据也会在OLED屏上进行显示。另外系统内还配备了霍尔测速模块,并将实时车速在显示屏上进行显示,通过按键可以对速度阈值进行调节,当速度超过阈值且车后障碍物的距离也小于阈值,蜂鸣器就会报警并控制打开继电器(刹车)。
2 主要器件
- 52单片机
- HC-SR04超声检测
- 蜂鸣器
- OLED屏
- 光电管
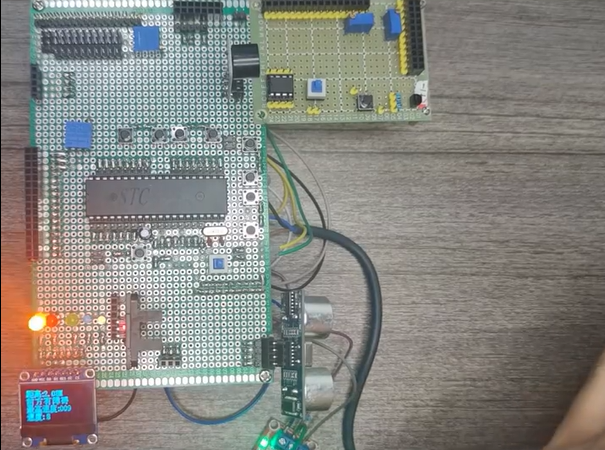
3 实现效果
光电管检测到障碍物时,小灯会闪烁
4 设计原理
4.1 HC-SR04超声波模
简介
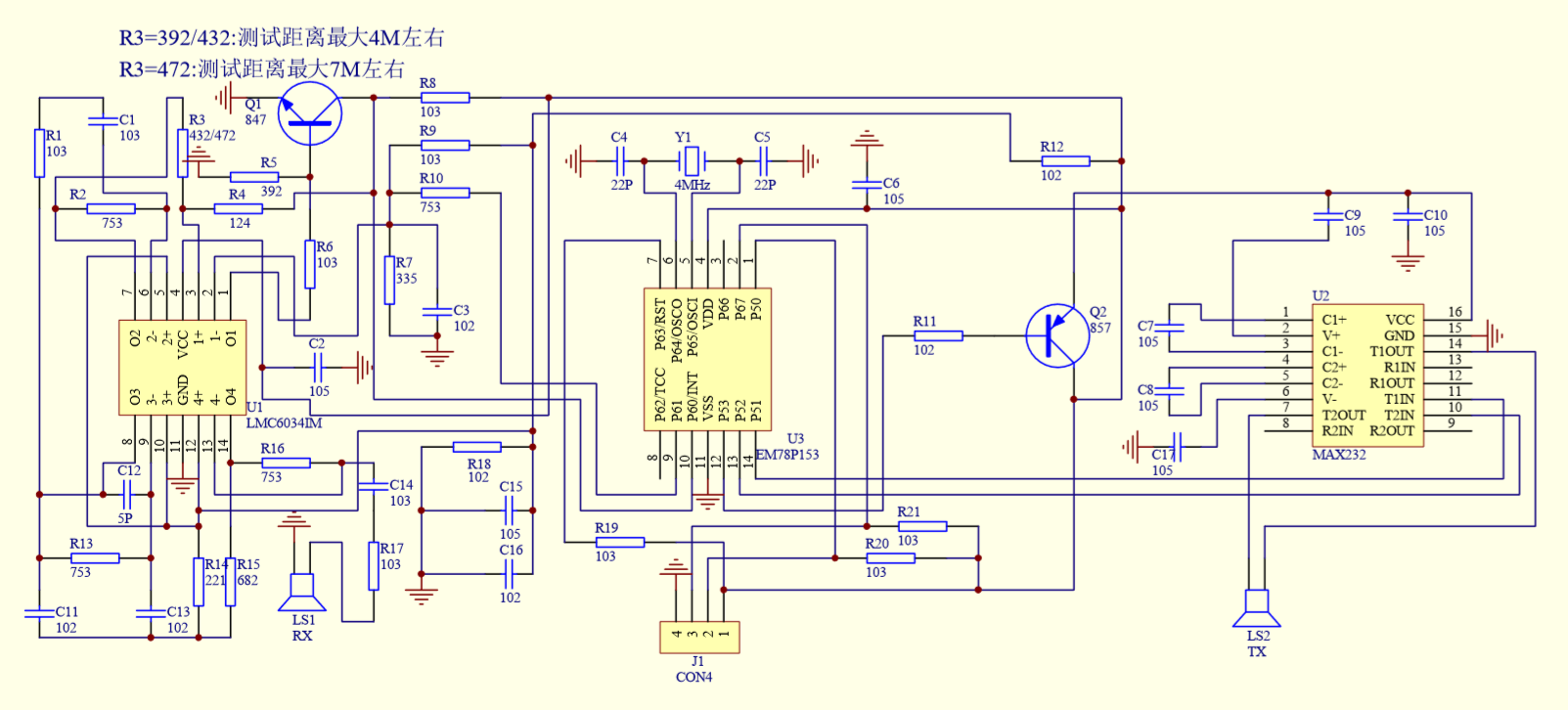
HC-SR04超声波模块常用于机器人避障、物体测距、液位检测、公共安防、停车场检测等场所。HC-SR04超声波模块主要是由两个通用的压电陶瓷超声传感器,并加外围信号处理电路构成的。如图:

两个压电陶瓷超声传感器,一个用于发出超声波信号,一个用于接收反射回来的超声波信号。由于发出信号和接收信号都比较微弱,所以需要通过外围信号放大器提高发出信号的功率,和将反射回来信号进行放大,以能更稳定地将信号传输给单片机。模块整体电路如图:
模块参数
(1)模块主要电气参数
- 使用电压:DC—5V
- 静态电流:小于2mA
- 电平输出:高5V
- 电平输出:底0V
- 感应角度:不大于15度
- 探测距离:2cm-450cm
- 高精度 可达0.2cm
(2)模块引脚
超声波模块有4个引脚,分别为Vcc、 Trig(控制端)、 Echo(接收端)、 GND;其中VCC、GND接上5V电源, Trig(控制端)控制发出的超声波信号,Echo(接收端)接收反射回来的超声波信号。模块如图

4.2 漫反射式传感器

简介
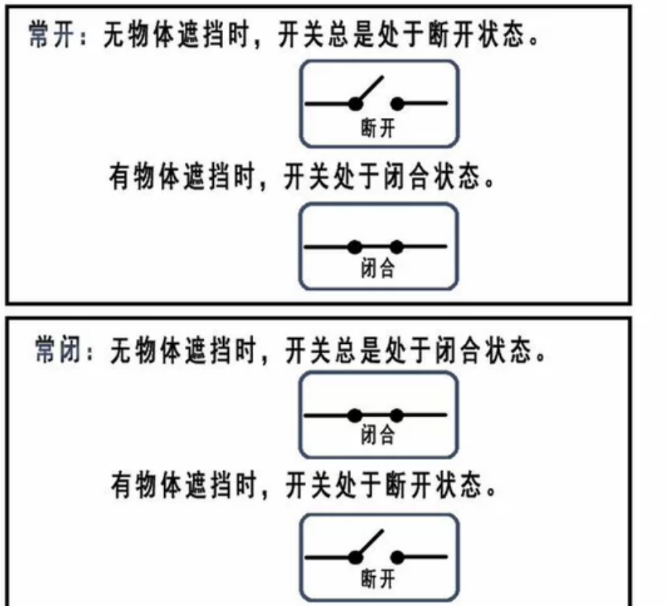
光电开关是一种具有开关量输出的位移传感器,输出有NPN、PNP、常开、常闭及继电器等,可检测金属(如钢、铁、铜)、塑料、玻璃、木头、水、纸、磁铁等透明和不透明物体,可与PLC、伺服控制器、变频器、计算器、控制器相连接达到自动输入信号的目的,广泛应用于机械、纺织、轻工造纸、印刷、包装等行业。
光电开关属于无接触测量传感器,其检测距离范围比较宽,在计数、测距和行程控制等许多测控系统中得到广泛应用。反射式光电开关又分为漫反射和镜反射式光电开关
工作原理
漫反射光电开关是一种集发射器和接收器于一体的传感器,当有被检测物体经过时,将光电开关发射器发射的足够量的光线反射到接收器,于是光电开关就产生了开关信号。当被检测物体的表面光亮或其反光率极高时,漫反射式的光电开关是首选的检测模式。
检测距离的调节

5 部分核心代码
//超声波测距
//晶振=8M
//MCU=STC10F04XE
//P0.0-P0.6共阳数码管引脚
//Trig = P1^0
//Echo = P3^2
#include <reg52.h> //包括一个52标准内核的头文件
#define uchar unsigned char //定义一下方便使用
#define uint unsigned int
#define ulong unsigned long
//***********************************************
sfr CLK_DIV = 0x97; //为STC单片机定义,系统时钟分频
//为STC单片机的IO口设置地址定义
sfr P0M1 = 0X93;
sfr P0M0 = 0X94;
sfr P1M1 = 0X91;
sfr P1M0 = 0X92;
sfr P2M1 = 0X95;
sfr P2M0 = 0X96;
//***********************************************
sbit Trig = P1^0; //产生脉冲引脚
sbit Echo = P3^2; //回波引脚
sbit test = P1^1; //测试用引脚
uchar code SEG7[10]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90};//数码管0-9
uint distance[4]; //测距接收缓冲区
uchar ge,shi,bai,temp,flag,outcomeH,outcomeL,i; //自定义寄存器
bit succeed_flag; //测量成功标志
//********函数声明
void conversion(uint temp_data);
void delay_20us();
//void pai_xu();
void main(void) // 主程序
{ uint distance_data,a,b;
uchar CONT_1;
CLK_DIV=0X03; //系统时钟为1/8晶振(pdf-45页)
P0M1 = 0; //将io口设置为推挽输出
P1M1 = 0;
P2M1 = 0;
P0M0 = 0XFF;
P1M0 = 0XFF;
P2M0 = 0XFF;
i=0;
flag=0;
test =0;
Trig=0; //首先拉低脉冲输入引脚
TMOD=0x11; //定时器0,定时器1,16位工作方式
TR0=1; //启动定时器0
IT0=0; //由高电平变低电平,触发外部中断
ET0=1; //打开定时器0中断
//ET1=1; //打开定时器1中断
EX0=0; //关闭外部中断
EA=1; //打开总中断0
while(1) //程序循环
{
EA=0;
Trig=1;
delay_20us();
Trig=0; //产生一个20us的脉冲,在Trig引脚
while(Echo==0); //等待Echo回波引脚变高电平
succeed_flag=0; //清测量成功标志
EX0=1; //打开外部中断
TH1=0; //定时器1清零
TL1=0; //定时器1清零
TF1=0; //
TR1=1; //启动定时器1
EA=1;
while(TH1 < 30);//等待测量的结果,周期65.535毫秒(可用中断实现)
TR1=0; //关闭定时器1
EX0=0; //关闭外部中断
if(succeed_flag==1)
{
distance_data=outcomeH; //测量结果的高8位
distance_data<<=8; //放入16位的高8位
distance_data=distance_data|outcomeL;//与低8位合并成为16位结果数据
distance_data*=12; //因为定时器默认为12分频
distance_data/=58; //微秒的单位除以58等于厘米
} //为什么除以58等于厘米, Y米=(X秒*344)/2
// X秒=( 2*Y米)/344 ==》X秒=0.0058*Y米 ==》厘米=微秒/58
if(succeed_flag==0)
{
distance_data=0; //没有回波则清零
test = !test; //测试灯变化
}
/// distance[i]=distance_data; //将测量结果的数据放入缓冲区
/// i++;
/// if(i==3)
/// {
/// distance_data=(distance[0]+distance[1]+distance[2]+distance[3])/4;
/// pai_xu();
/// distance_data=distance[1];
a=distance_data;
if(b==a) CONT_1=0;
if(b!=a) CONT_1++;
if(CONT_1>=3)
{ CONT_1=0;
b=a;
conversion(b);
}
/// i=0;
/// }
}
}
//***************************************************************
//外部中断0,用做判断回波电平
INTO_() interrupt 0 // 外部中断是0号
{
outcomeH =TH1; //取出定时器的值
outcomeL =TL1; //取出定时器的值
succeed_flag=1; //至成功测量的标志
EX0=0; //关闭外部中断
}
//****************************************************************
//定时器0中断,用做显示
timer0() interrupt 1 // 定时器0中断是1号
{
TH0=0xfd; //写入定时器0初始值
TL0=0x77;
switch(flag)
{case 0x00:P0=ge; P2=0xfd;flag++;break;
case 0x01:P0=shi;P2=0xfe;flag++;break;
case 0x02:P0=bai;P2=0xfb;flag=0;break;
}
}
//*****************************************************************
/*
//定时器1中断,用做超声波测距计时
timer1() interrupt 3 // 定时器0中断是1号
{
TH1=0;
TL1=0;
}
*/
//******************************************************************
//显示数据转换程序
void conversion(uint temp_data)
{
uchar ge_data,shi_data,bai_data ;
bai_data=temp_data/100 ;
temp_data=temp_data%100; //取余运算
shi_data=temp_data/10 ;
temp_data=temp_data%10; //取余运算
ge_data=temp_data;
bai_data=SEG7[bai_data];
shi_data=SEG7[shi_data];
ge_data =SEG7[ge_data];
EA=0;
bai = bai_data;
shi = shi_data;
ge = ge_data ;
EA=1;
}
//******************************************************************
void delay_20us()
{ uchar bt ;
for(bt=0;bt<100;bt++);
}
/*
void pai_xu()
{ uint t;
if (distance[0]>distance[1])
{t=distance[0];distance[0]=distance[1];distance[1]=t;} /*交换值
if(distance[0]>distance[2])
{t=distance[2];distance[2]=distance[0];distance[0]=t;} /*交换值
if(distance[1]>distance[2])
{t=distance[1];distance[1]=distance[2];distance[2]=t;} /*交换值
}
*/















 397
397











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









