






目录
一、摄像头简介
摄像头(CAMERA)又称为电脑相机、电脑眼等,它作为一种视频输入设备,在过去被广泛的运用于视频会议、远程医疗及实时监控等方面。近年以来,随着互联网技术的发展,网络速度的不断提高,再加上感光成像器件技术的成熟并大量用于摄像头的制造上,这使得它的价格降到普通人可以承受的水平。普通的人也可以彼此通过摄像头在网络进行有影像、有声音的交谈和沟通,另外,人们还可以将其用于当前各种流行的数码影像、影音处理。
二、摄像头的分类
摄像头分为数字摄像头和模拟摄像头两大类。模拟摄像头可以将视频采集设备产生的模拟视频信号转换成数字信号,进而将其储存在计算机里。模拟摄像头捕捉到的视频信号必须经过特定的视频捕捉卡将模拟信号转换成数字模式,并加以压缩后才可以转换到计算机上运用。数字摄像头可以直接捕捉影像,然后通过串、并口或者USB接口传到计算机里。现在电脑市场上的摄像头基本以数字摄像头为主,而数字摄像头中又以使用新型数据传输接口的USB数字摄像头为主,目前市场上可见的大部分都是这种产品。除此之外还有一种与视频采集卡配合使用的产品,但目前还不是主流。
由于个人电脑的迅速普及,模拟摄像头的整体成本较高等原因, USB接口的传输速度远远高于串口、并口的速度,因此现在市场热点主要是USB接口的数字摄像头。以下主要是指USB接口的数字摄像头。
三、摄像头的工作原理
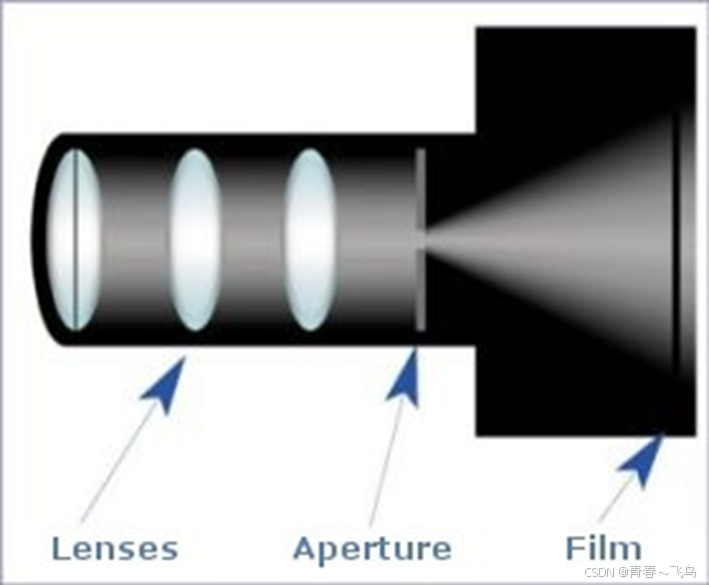
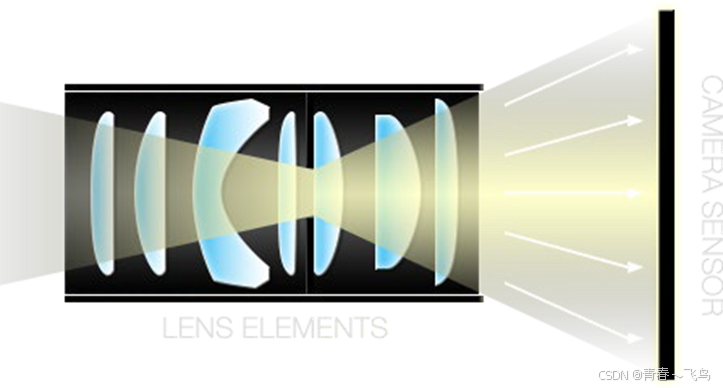
摄像头的工作原理大致为:景物通过镜头(LENS)生成的光学图像投射到图像传感器表面上,然后转为电信号,经过A/D(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片(DSP)中加工处理,再通过USB接口传输到电脑中处理,通过显示器就可以看到图像了。
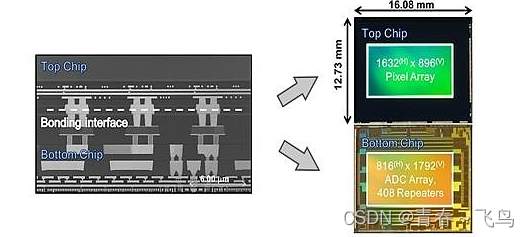
图像传感器(SENSOR)是一种半导体芯片,其表面包含有几十万到几百万的光电二极管。光电二极管受到光照射时,就会产生电荷。
数字信号处理芯片DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通过一系列复杂的数学算法运算,对数字图像信号参数进行优化处理,并把处理后的信号通过USB等接口传到PC等设备。
DSP结构框架:
ISP(image signal processor)(镜像信号处理器)
JPEG encoder(JPEG图像解码器)
USB device controller(USB设备控制器)
四、摄像头的主要结构和组件
从摄像头的工作原理就可以列出摄像头的主要结构和组件:
主控芯片(详情请参阅:《影响摄像头的关键元器件是什么?》)
感光芯片(详情请参阅:《影响摄像头的关键元器件是什么?》)
镜头(详情请参阅:《影响摄像头的关键元器件是什么?》)
电源,摄像头内部需要两种工作电压:3.3V和2.5V,因此好的摄像头内部电源也是保证摄像头稳定工作的一个因素。
五、摄像头的一些技术指标
1、 图像解析度/分辨率(Resolution):
SXGA(1280 x1024)又称130万像素
XGA(1024 x768)又称80万像素
SVGA(800 x600)又称50万像素
VGA(640x480)又称30万像素(35万是指648X488)
CIF(352x288) 又称10万像素
SIF/QVGA(320x240)
QCIF(176x144)
QSIF/QQVGA(160x120)
2、图像格式(image Format/ Color space):
RGB24,I420是目前最常用的两种图像格式
RGB24:表示R、G、B三种颜色各8bit,最多可表现256级浓淡,从而可以再现256*256*256种颜色
I420:YUV格式之一
其它格式有: RGB565,RGB444,YUV4:2:2等
3、自动白平衡调整(AWB):
要求在不同色温环境下,照白色的物体,屏幕中的图像应也是白色的。色温表示光谱成份,光的颜色。色温低表示长波光成分多。当色温改变时,光源中三基色(红、绿、蓝)的比例会发生变化,需要调节三基色的比例来达到彩色的平衡,这就是白平衡调节的实际。
4、图像压缩方式:
JPEG:(joint photographic expert group)静态图像压缩方式。一种有损图像的压缩方式。压缩比越大,图像质量也就越差。当图像精度要求不高存储空间有限时,可以选择这种格式。目前大部分数码相机都使用JPEG格式。
5、彩色深度(色彩位数):
反映对色彩的识别能力和成像的色彩表现能力,实际就是A/D转换器的量化精度,是指将信号分成多少个等级。常用色彩位数(bit)表示。彩色深度越高,获得的影像色彩就越艳丽动人。
6、图像噪音:
指的是图像中的杂点干挠。表现为图像中有固定的彩色杂点。
7、视角:
与人的眼睛成像是相成原理,简单说就是成像范围。
8、输出/输入接口:
串行接口(RS232/422):传输速率慢,为115kbit/s
并行接口(PP):速率可以达到1Mbit/s
红外接口(IrDA):速率也是115kbit/s,一般笔记本电脑有此接口
通用串行总线USB:即插即用的接口标准,支持热插拔
USB1.1速率可达12Mbit/s,USB2.0可达480bit/s; IEEE1394(火线)接口(亦称ilink):其传输速率可达100M~400Mbit/s
六、镜头模组的组成

常见于手机,分为有自动对焦AF,和无自动

常见于车载相机,一般为无自动对焦模组
对焦FF(fix focus)两种镜头模组 :
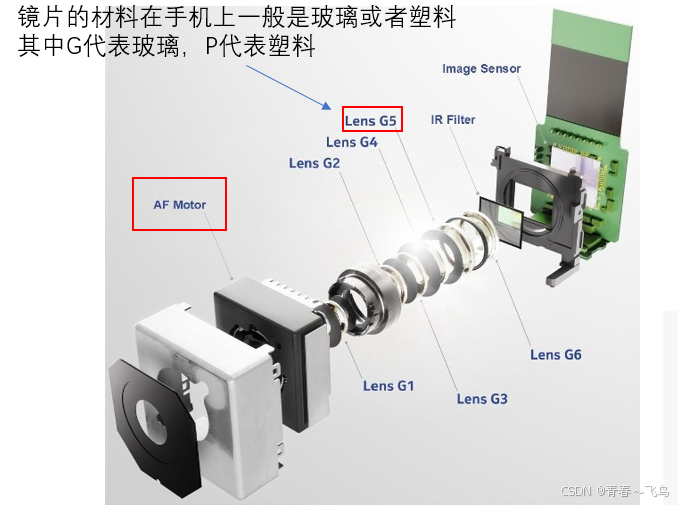
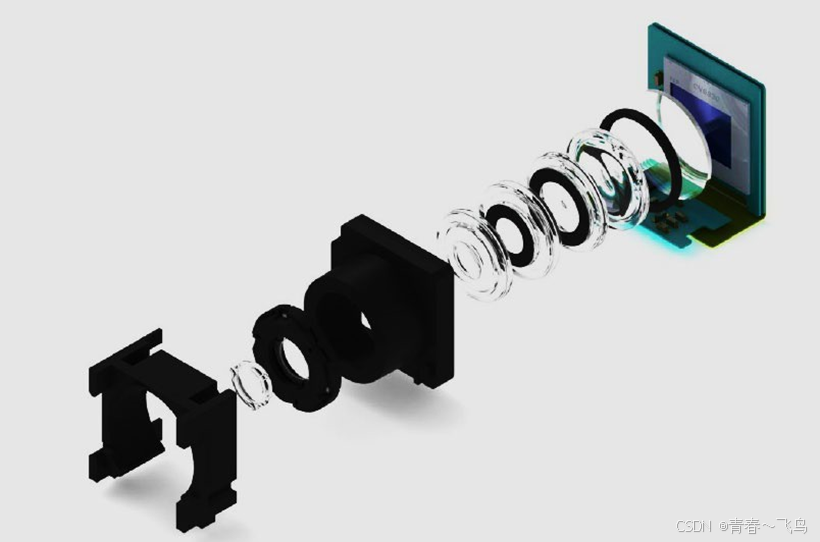
简单来说,一个模组里有下面三种部件:
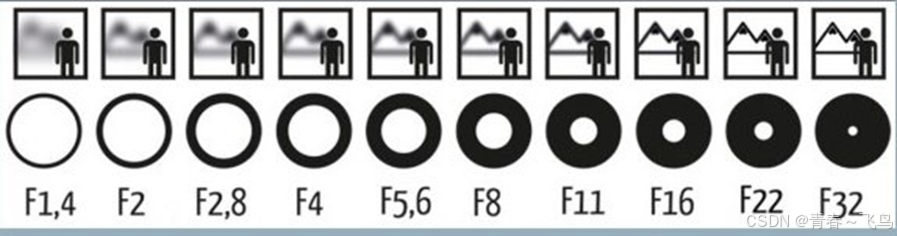
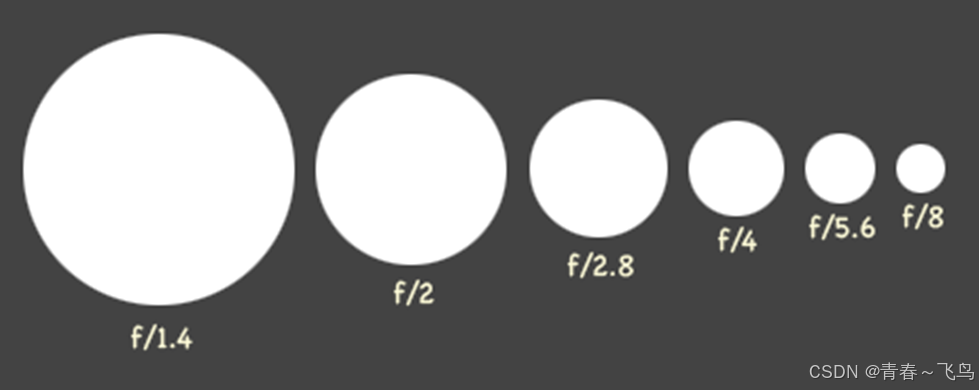
七、光圈
光圈数值变化对应的光圈大小的变化:
光圈背景清晰度的数值变化对应变化:
八、景深
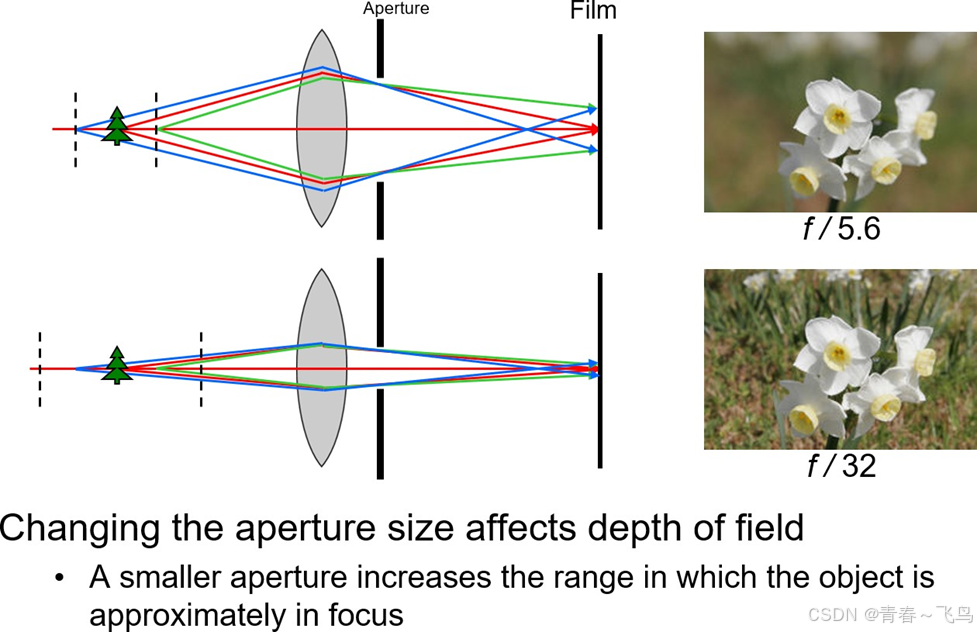
景深变化的光学原因
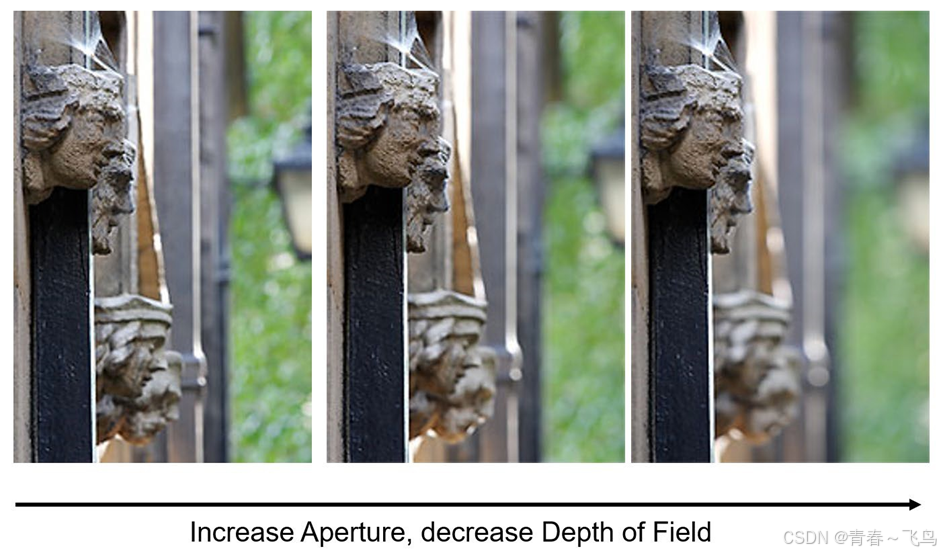
光圈对于景深的实际影响
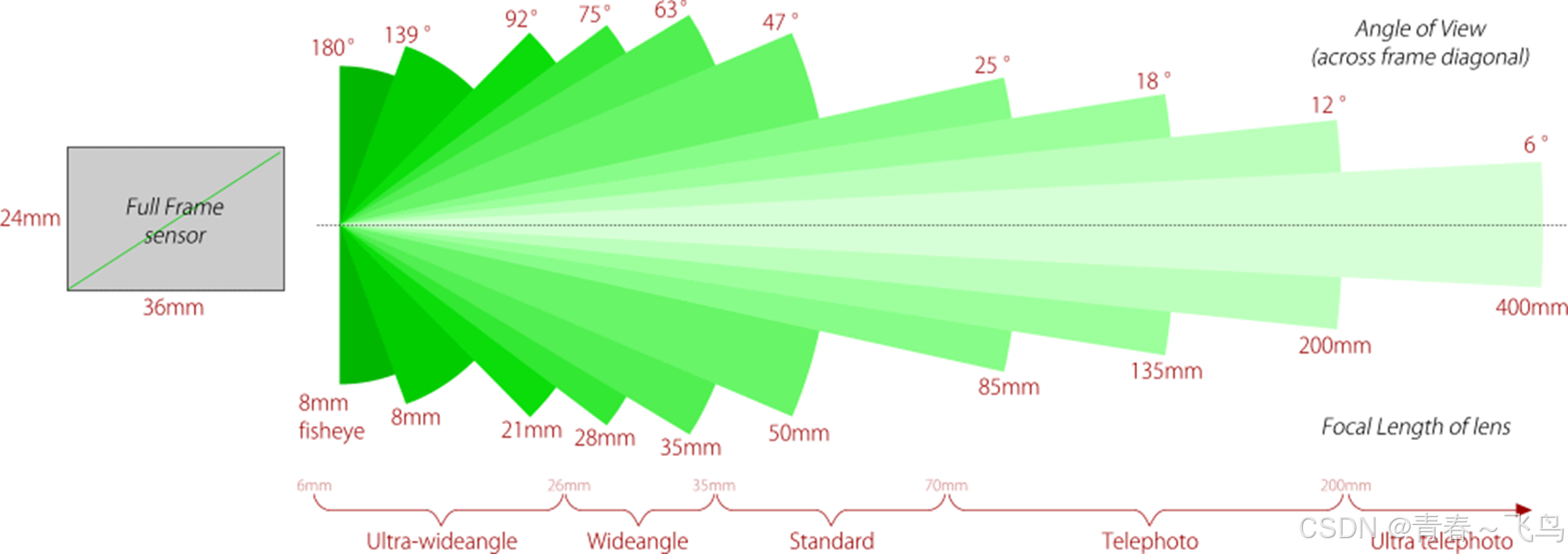
九、视场角
所以视场角在严格意义上来说当镜头和sensor确定了以后,只要不改变裁切,是不会发生变化的,所以当我们取景位置不同的时候,从镜头角度来说是不能说视场角不同。
焦距越短,视场角越大:



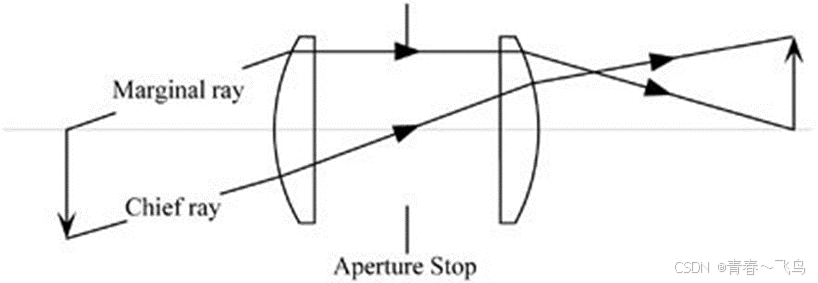
十、主光线角度
定义:像高最大处和光轴之间的夹角
Chief ray:主光束
Marginal ray:边缘光束
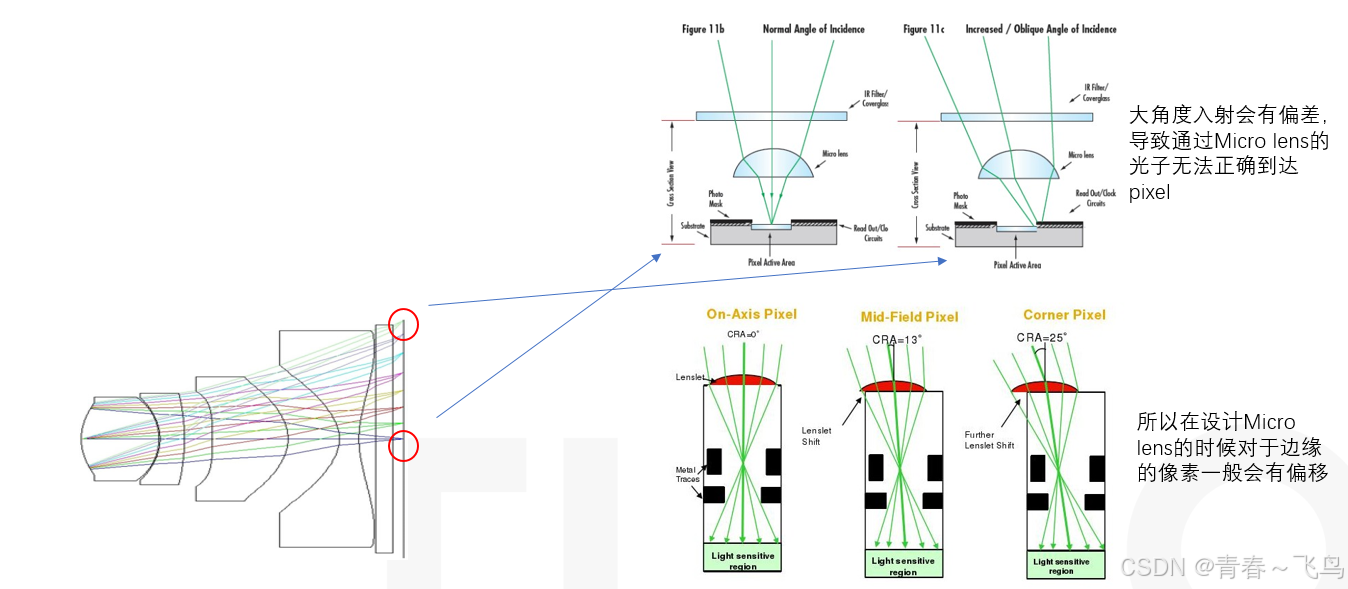
Sensor CRA
十一、分辨率
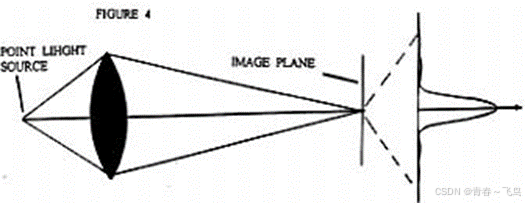
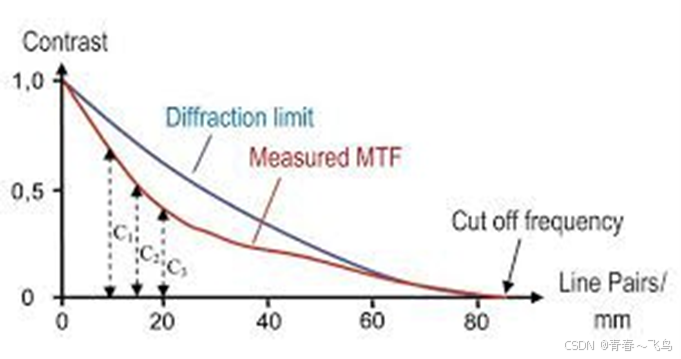
定义:MTF:Modulation Transfer Function(调制传递函数)
衍射极限的存在:一个点经过光学系统必然不会得到理想的点,而是一个弥散圆,这个圆的直径跟波长、焦距和平行光光束直径有关
MTF的本质就是区分两个相邻的点:
Diffraction limit
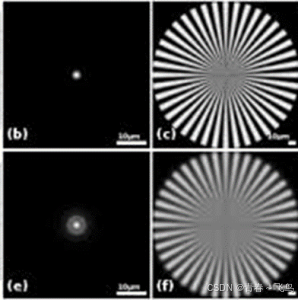
不同的弥散圆对应的解析力
弥散圆

理想图像经过光学系统
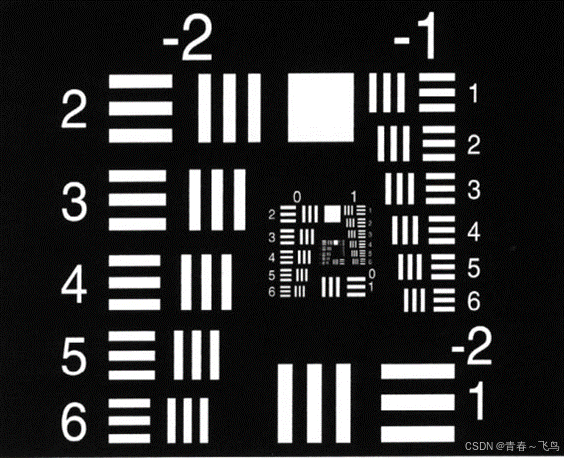
对于镜头的MTF的测试一般就是这种不同频率的pattern
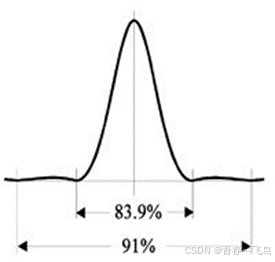
十二、相对照度
镜头的RI反应到图像上就是shading:
RI不好的表现:





十三、相差
- 球差:近轴光线和离轴光线聚焦位置不同形成的像差
- 慧差:光大角度入射时在成像面产生的像差
- 色差:镜头对于不同波长的光折射率不同引起的
- 像散:水平和垂直方向聚焦能力不同引入的
- 场曲:透镜整个光束的交点不能与理想像点重合,整个像平面是一个曲面
- 畸变:镜头中心的放大率和四周不同引起的
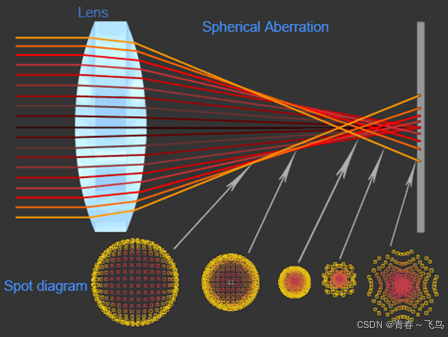
球差
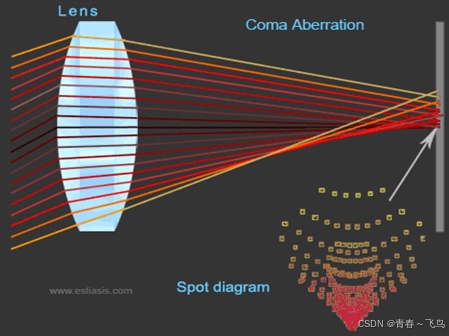
慧差
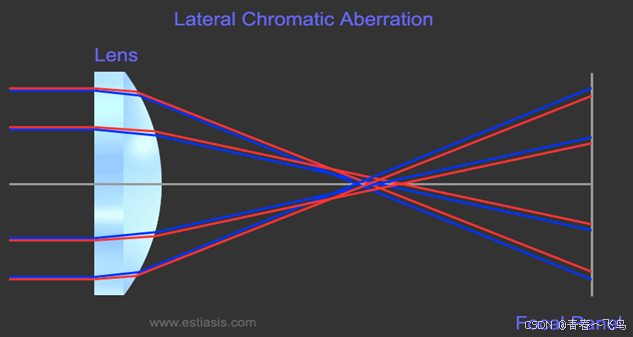
色差
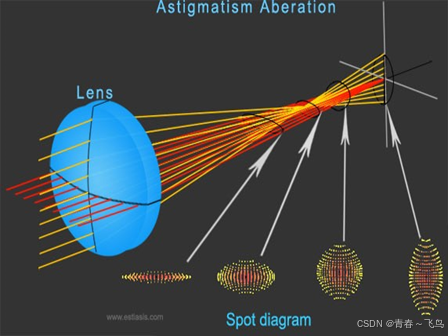
像散
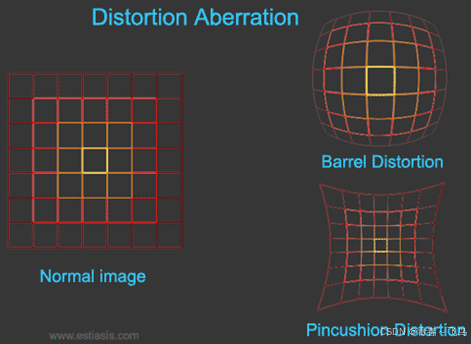
畸变
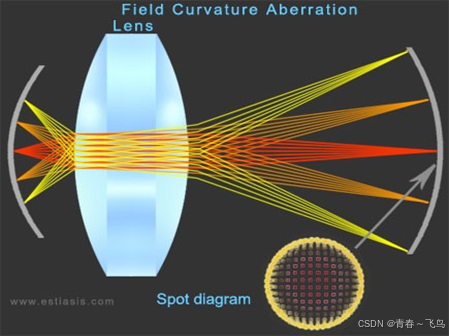
场曲
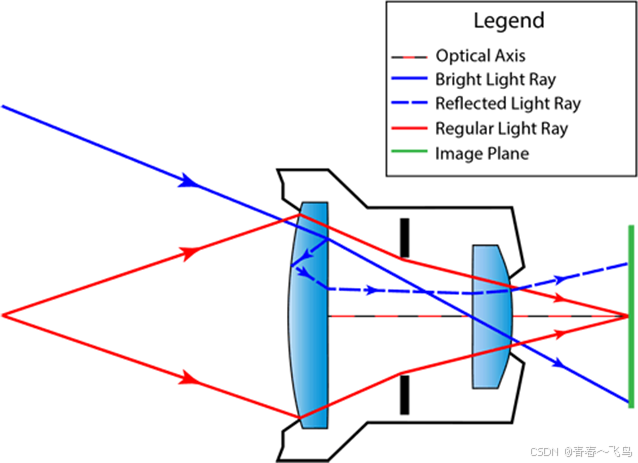
十四、炫光和鬼影
我们在实际的调试过程中,在对着强光的时候主要会遇到的就是Veiling flare(眩光) and ghost image(鬼像)
炫光:
veiling flare:光在经过镜片的时候,除了投射还是反射,光线在镜片间的来回反射就形成了veiling flare,会造成对比度的降低。
解决方案一般是镀膜
鬼影:
边缘处的强光在入射到镜片中之后由于反射和折射会在成像面上成像,一般会在强光物体的对角线处出现。






















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











