






永磁同步电机转速PI控制,SMC滑模控制,ADRC自抗扰控制Simulink对比仿真模型
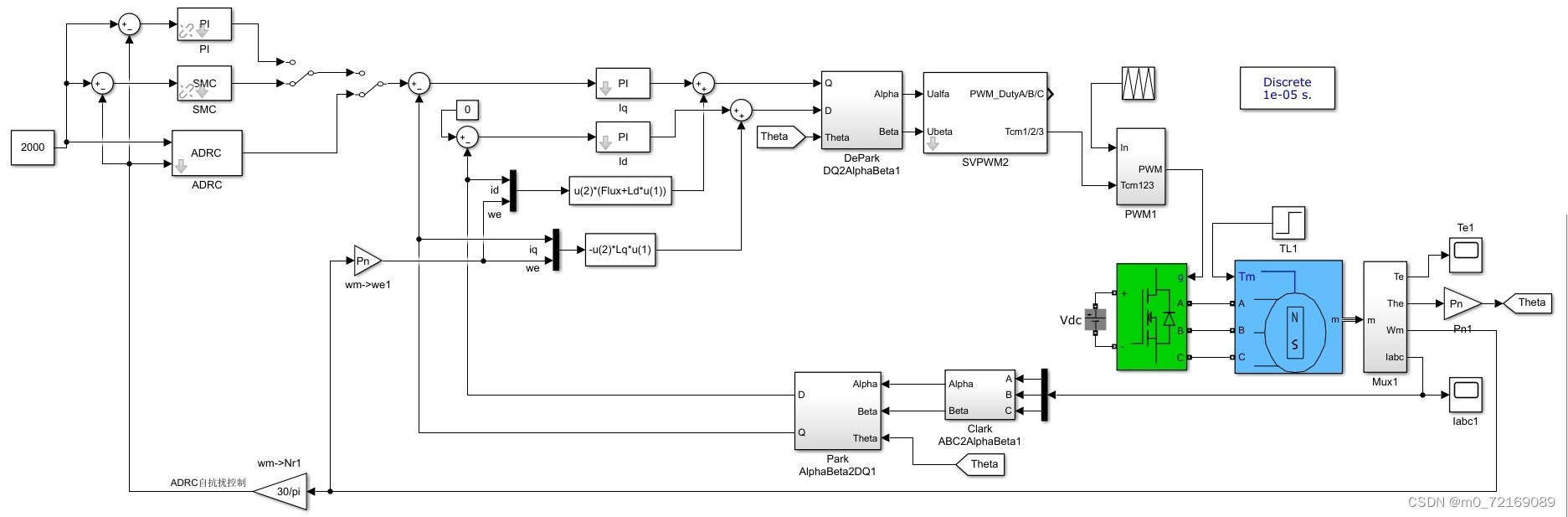
1.永磁同步电机SVPWM控制算法,实现FOC矢量控制,DQ轴解耦控制~
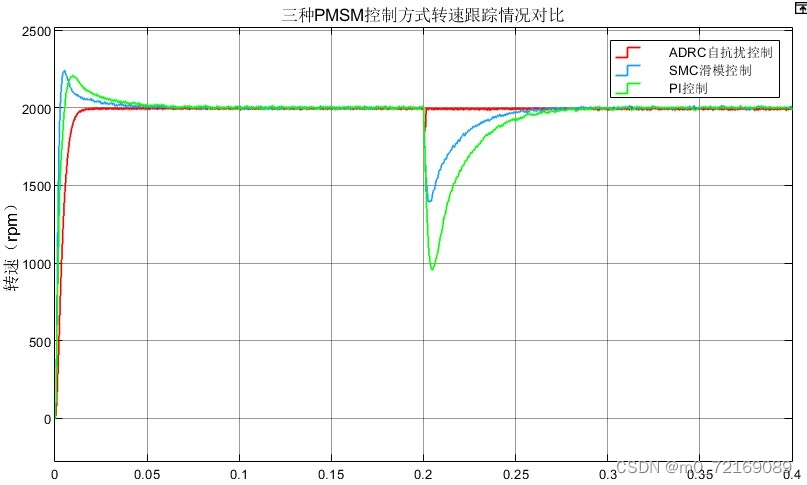
2.转速电流双闭环控制,电流环采用PI控制,转速环分别采用PI控制、SMC滑模控制和ADRC自抗扰控制,对三种方法进行对比,分析ADRC控制优越性~
ID:14118661001669662 狼堡工作室
狼堡工作室














 491
491
07-02
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









