






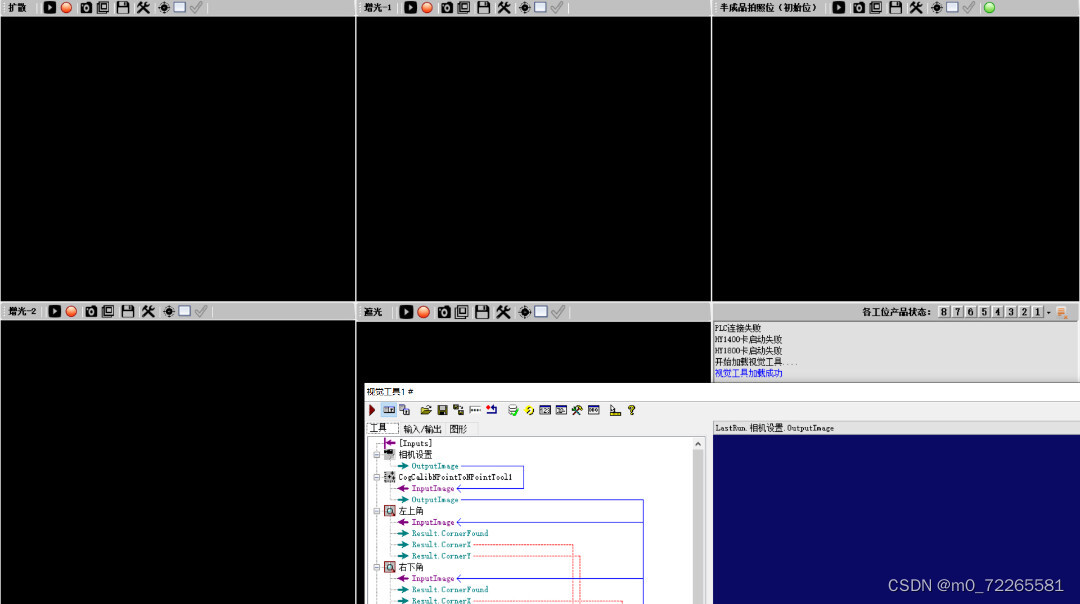
基于康耐视cognexVisionpro用C#二次开发的多相机视觉对位框架
支持1:多相机对位逻辑运算,旋转标定坐标关联运算(可供参考学习)可以协助理解做对位贴合项目思路。
支持2:直接连接运动控制卡,控制UVW平台运动(可供参考学习)
支持3:自动标定程序设定(可供参考学习)
支持4:TCP/IP通讯(可供参考学习)
以上功能全部正常使用无封装,可正常运行。
ID:3225613594325323 机器视觉编程
机器视觉编程
基于康耐视cognexVisionpro用C#二次开发的多相机视觉对位框架
支持1:多相机对位逻辑运算,旋转标定坐标关联运算(可供参考学习)可以协助理解做对位贴合项目思路。
支持2:直接连接运动控制卡,控制UVW平台运动(可供参考学习)
支持3:自动标定程序设定(可供参考学习)
支持4:TCP/IP通讯(可供参考学习)
以上功能全部正常使用无封装,可正常运行。
ID:3225613594325323机器视觉编程











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 698
698





