






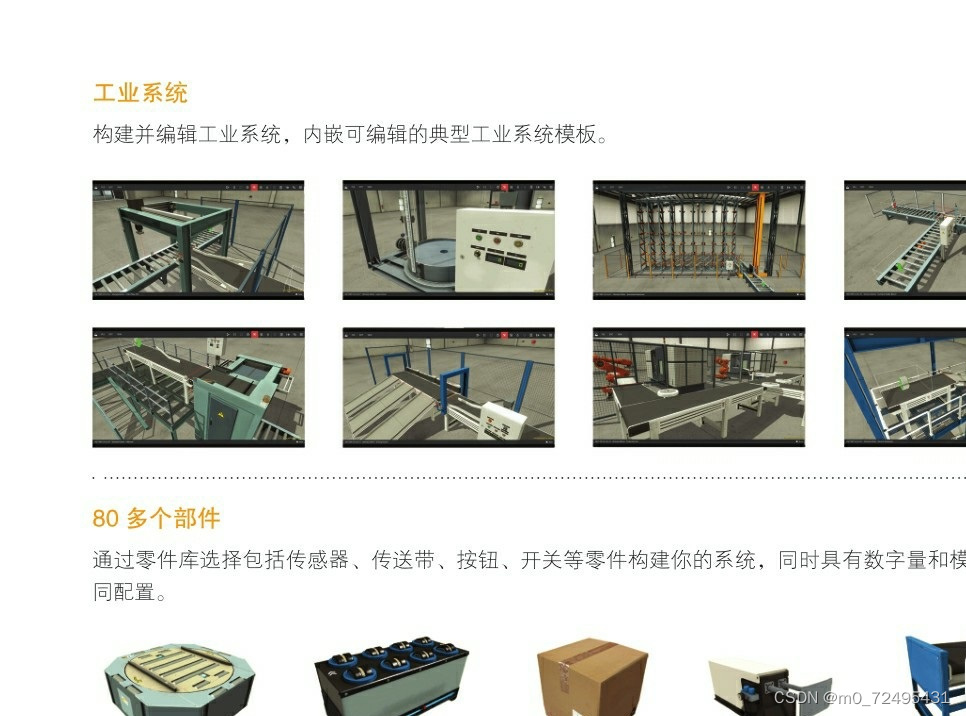
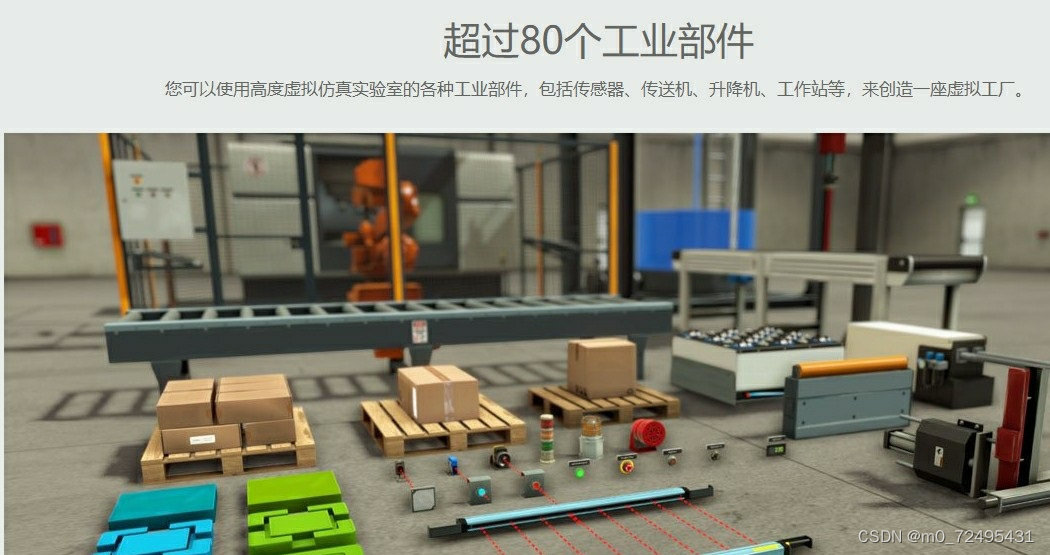
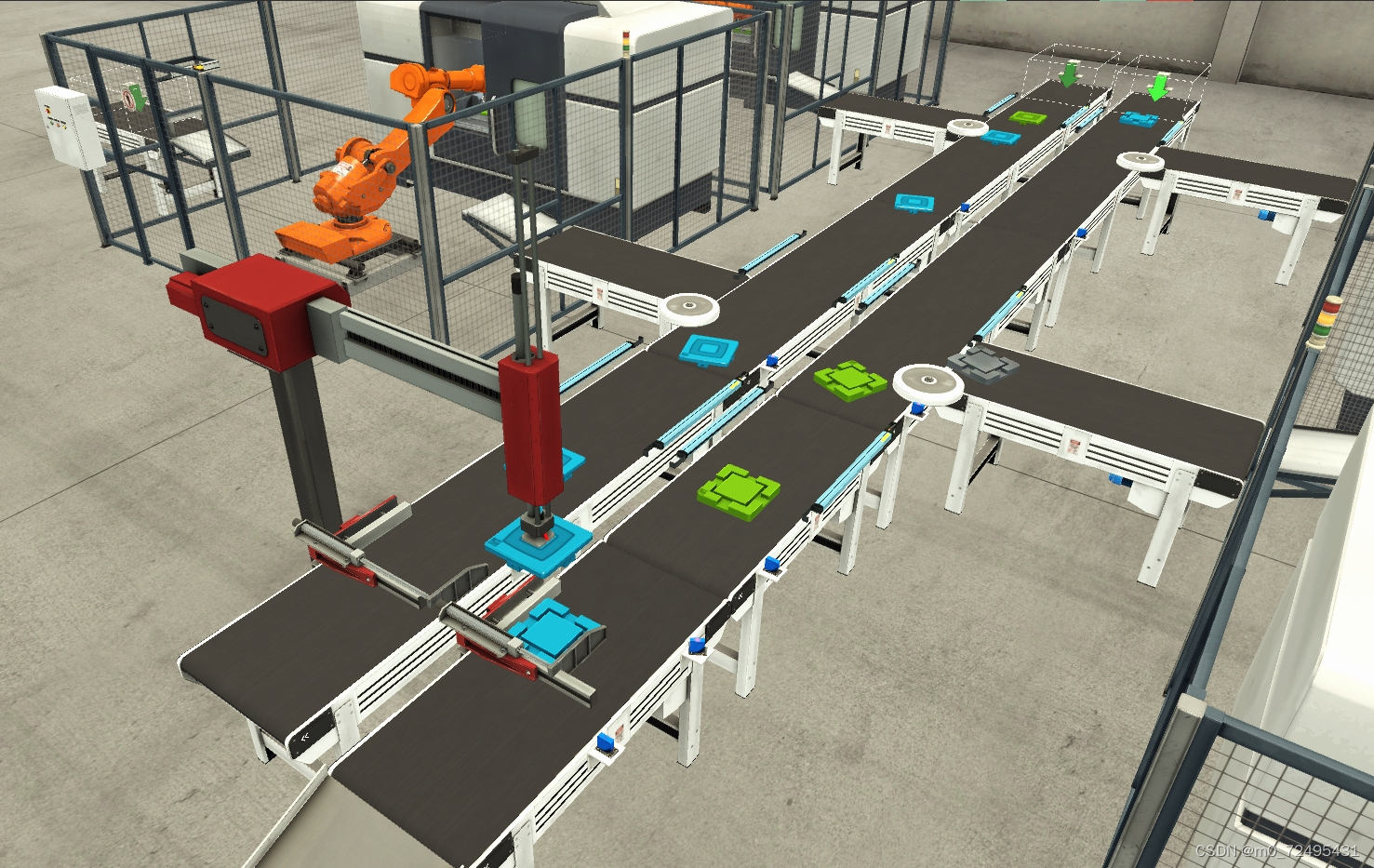
FactoryIO十字机械手组装工作站仿真实验程序
使用简单的梯形图编写,逻辑清晰,通俗易懂,写有详细注释,起到抛砖引玉的作用,比较适合有动手能力的入门初学者。
加工中心的机器人不是真正的机器人,是仿真软件的一个部件,通过简单的IO控制,机器人执行固定的动作。
软件环境:
1、西门子编程软件:TIA Portal V16(博图V16)
2、FactoryIO 2.4
内容清单:
1、FactoryIO中文说明书+场景模型文件
2、博图V16PLC程序(源码)
程序实现功能:
四台加工中心(机器人不是真正的)开始工作,加工好的零件通过皮带输送到机械手进行组装,机械手逻辑效率高,皮带有防堵、避让、分流功能。
 YYYYID:5510665453511636
YYYYID:5510665453511636 呀呀塔
呀呀塔















 3206
3206











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









