







demo.cpp
#include<iostream>
using namespace std;
#include<Eigen\Core>
#include<Eigen\Dense>
#include<Eigen/Geometry>
const double M_PI = 3.1415926535;
void Test1()
{
Eigen::Matrix<float, 2, 3> matrix_23 = Eigen::Matrix<float, 2, 3>::Ones();
Eigen::Vector3d v_3d = Eigen::Vector3d::Zero();// 3x1
Eigen::Matrix3d matrix_33 = Eigen::Matrix3d::Zero();//3x3
// 动态size矩阵
Eigen::Matrix<double, Eigen::Dynamic, Eigen::Dynamic> matrix_dynamic;
// 更简单的表达形式
Eigen::MatrixXd matrix_x;
// operate
matrix_23 << 1, 2, 3, 4, 5, 6;
v_3d << 3, 2, 1;
cout << matrix_23 << endl;
cout << endl;
cout << v_3d << endl;
cout << endl;
// 乘法 float -> double
Eigen::Matrix<double, 2, 1> result = matrix_23.cast<double>() * v_3d;
cout << result << endl;
cout << endl;
matrix_33 = Eigen::Matrix3d::Random();// 伪随机
cout << matrix_33 << endl;
cout << endl;
cout << matrix_23.transpose() << endl; cout << endl;
cout << matrix_23.sum() << endl; cout << endl;
cout << matrix_33.trace() << endl; cout << endl;
cout << 10 * matrix_33 << endl; cout << endl;
cout << matrix_33.inverse() << endl; cout << endl;
cout << matrix_33.determinant() << endl; cout << endl;
// 特征值
Eigen::SelfAdjointEigenSolver<Eigen::Matrix3d> eigen_solver(matrix_33.transpose() * matrix_33);
cout << "values = " << eigen_solver.eigenvalues() << endl; cout << endl;
cout << "vectors = " << eigen_solver.eigenvectors() << endl; cout << endl;
// 解方程 A * x = b
Eigen::Matrix<double, 50, 50> A = Eigen::Matrix<double, 50, 50>::Random();
Eigen::Matrix<double, 50, 1 > b = Eigen::Matrix<double, 50, 1 >::Random();
// 如果无解, eigen 是怎么解决这个问题的??????
// 法一、x = inv(A)*b
cout << A.inverse() * b << endl; cout << endl;
// 法二、QR分解
cout << A.colPivHouseholderQr().solve(b) << endl; cout << endl;
}
void Test2()
{
Eigen::Matrix3d R_mat = Eigen::Matrix3d::Identity();
Eigen::AngleAxisd R_vec(M_PI / 4, Eigen::Vector3d(0, 0, 1)); // 绕Z轴旋转Π/4
// AngleAxisd -> Matrix3d
R_mat = R_vec.matrix();
cout << R_vec.toRotationMatrix() << endl; cout << endl;
cout << R_vec.matrix() << endl; cout << endl;
// 坐标旋转:point2 = R_vec * point1
Eigen::Vector3d point1(1, 0, 0);
Eigen::Vector3d point2 = R_vec * point1; // point2 = R_mat * point1
cout << point2 << endl; cout << endl;
// 旋转矩阵 -> 欧拉角
Eigen::Vector3d ZYX_angle = R_mat.eulerAngles(2, 1, 0);// Z Y X 顺序;
cout << ZYX_angle << endl; cout << endl;
// 初始化一个T = (R|t)
Eigen::Isometry3d T = Eigen::Isometry3d::Identity();
T.rotate(R_vec);
T.pretranslate(Eigen::Vector3d(1, 3, 4));
cout << "T = " << endl;
cout << T.matrix() << endl; cout << endl;
// point3 = T * point1
Eigen::Vector3d point3 = T * point1;
cout << point3 << endl; cout << endl;
// 初始化一个四元数
Eigen::Quaterniond q = Eigen::Quaterniond(R_vec);
cout << "q = " << endl;
cout << q.coeffs() << endl; cout << endl;
// point4 = q * point1
Eigen::Vector3d point4 = q * point1;
cout << point4 << endl; cout << endl;
}
/**********************************************************************************************************
功能:创建一个齐次变换矩阵 T = (R|t);
输入:roll(X轴)、pitch(Y轴)、yaw(Z轴):欧拉角;
(x, y, z):位移;
输出:齐次变换矩阵 T
返回:...
**********************************************************************************************************/
Eigen::Isometry3d CreateT(const double& roll, const double& pitch, const double& yaw,
const double& x, const double& y, const double& z)
{
// <1> 初始化R
Eigen::Matrix3d R;
// 按照 ZYX 顺序旋转
R = Eigen::AngleAxisd(roll, Eigen::Vector3d::UnitX()) *
Eigen::AngleAxisd(pitch, Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd(yaw, Eigen::Vector3d::UnitZ());
// <2> 初始化t
Eigen::Vector3d t(x, y, z);
// <3> 构建T = (R|t)
Eigen::Isometry3d T = Eigen::Isometry3d::Identity();
T.rotate(R);
T.pretranslate(t);
return T;
}
int main()
{
// <1> 由欧拉角 + 位姿 初始化姿态; Pose1 -> 齐次变换矩阵 T1
Eigen::Isometry3d T1 = CreateT((30.0 / 180.0) * M_PI, (25.0 / 180.0) * M_PI, (27.0 / 180.0) * M_PI, 1.2, 0.234, 2.3);
Eigen::Isometry3d T2 = CreateT((23.0 / 180.0) * M_PI, (33.0 / 180.0) * M_PI, (89.0 / 180.0) * M_PI, 0.1, 0.4, 0.1);
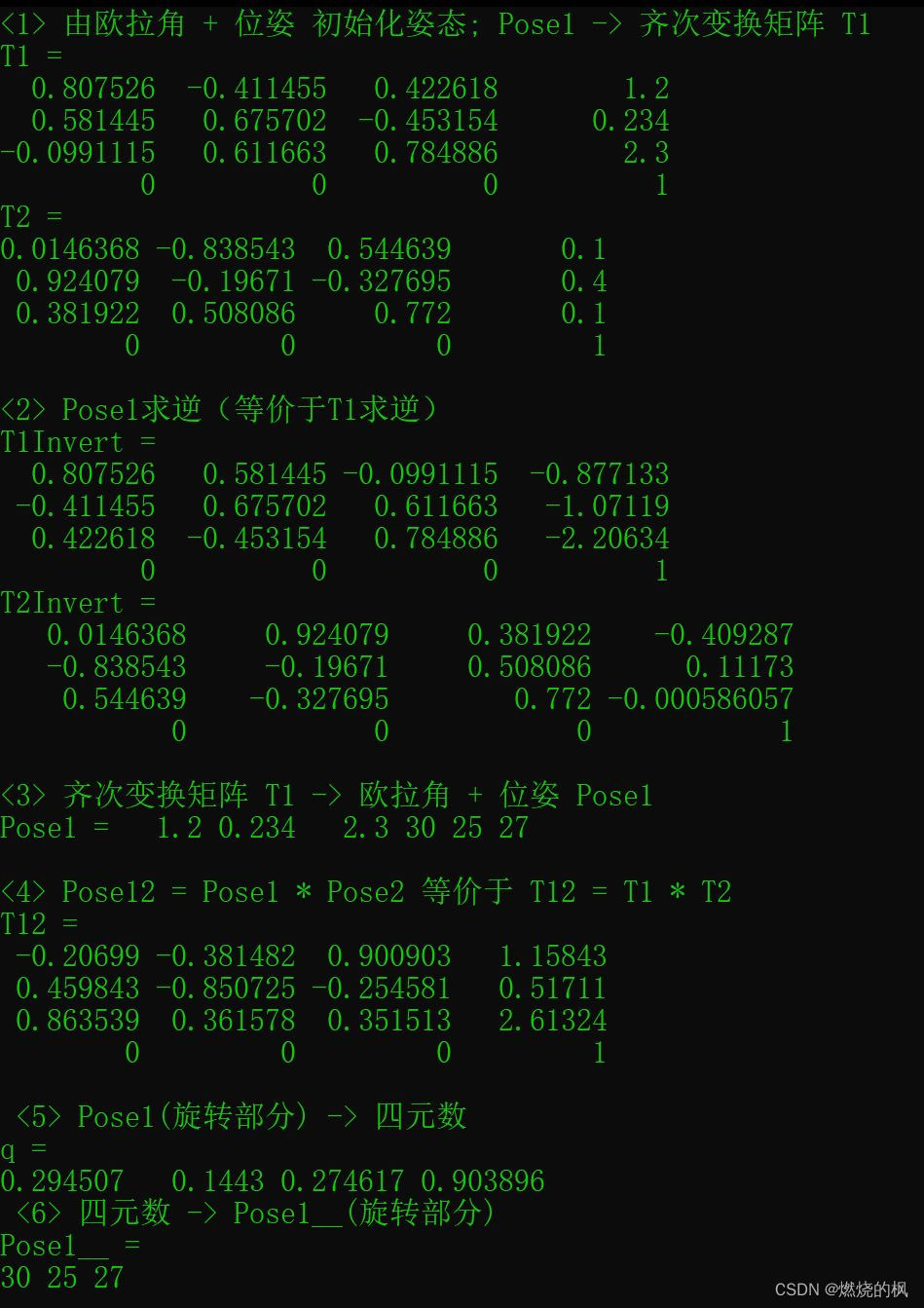
cout << "<1> 由欧拉角 + 位姿 初始化姿态; Pose1 -> 齐次变换矩阵 T1" << endl;
cout << "T1 = " << endl; cout << T1.matrix() << endl;
cout << "T2 = " << endl; cout << T2.matrix() << endl;
cout << endl;
// <2> Pose1求逆(等价于T1求逆)
Eigen::Isometry3d T1Invert = T1.inverse();
Eigen::Isometry3d T2Invert = T2.inverse();
cout << "<2> Pose1求逆(等价于T1求逆)" << endl;
cout << "T1Invert = " << endl; cout << T1Invert.matrix() << endl;
cout << "T2Invert = " << endl; cout << T2Invert.matrix() << endl;
cout << endl;
// <3> 齐次变换矩阵 T1 -> 欧拉角 + 位姿 Pose1
cout << "<3> 齐次变换矩阵 T1 -> 欧拉角 + 位姿 Pose1" << endl;
cout << "Pose1 = ";
cout << T1.translation().transpose() << " " << T1.rotation().eulerAngles(0, 1, 2).transpose() * (180 / M_PI) << endl;
cout << endl;
// <4> Pose12 = Pose1 * Pose2 等价于 T12 = T1 * T2
Eigen::Isometry3d T12 = T1 * T2;
cout << "<4> Pose12 = Pose1 * Pose2 等价于 T12 = T1 * T2" << endl;
cout << "T12 = " << endl; cout << T12.matrix() << endl;
cout << endl;
// <5> Pose1(旋转部分) -> 四元数
Eigen::Quaterniond q = Eigen::Quaterniond(T1.rotation());
cout << " <5> Pose1(旋转部分) -> 四元数" << endl;
cout << "q = " << endl; cout << q.coeffs().transpose() << endl; // coeffs 中实部在最后
// <6> 四元数 -> Pose1__
cout << " <6> 四元数 -> Pose1__(旋转部分)" << endl;
cout << "Pose1__ = " << endl; cout << q.toRotationMatrix().eulerAngles(0, 1, 2).transpose() * (180 / M_PI) << endl;
return 1;
}运行结果:

















 957
957











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











