






第一章 线性空间
1.4 线性映射
1 定义(线性映射与线性变换)
设
V
1
V_1
V1、
V
2
V_2
V2 是
F
\Bbb F
F 上的线性空间。
σ
:
V
1
→
V
2
\sigma:V_1\to V_2
σ:V1→V2 是映射。如果
(1)(保加法)
σ
(
e
1
+
e
2
)
=
σ
(
e
1
)
+
σ
(
e
2
)
\sigma(e_1+e_2)=\sigma(e_1)+\sigma(e_2)
σ(e1+e2)=σ(e1)+σ(e2)
(2)(保数乘法)
σ
(
e
k
)
=
σ
(
e
)
k
\sigma(ek)=\sigma(e)k
σ(ek)=σ(e)k
则称
σ
\sigma
σ 是
V
1
→
V
2
V_1 \to V_2
V1→V2 的线性映射。
e
1
e_1
e1 为
σ
(
e
1
)
\sigma(e_1)
σ(e1) 的原像,
σ
(
e
1
)
\sigma(e_1)
σ(e1) 为
e
1
e_1
e1的像。
若
V
1
=
V
2
=
V
V_1=V_2=V
V1=V2=V,则称
σ
:
V
→
V
\sigma:V\to V
σ:V→V 为
V
V
V 上的线性变换。
从信号的角度讲,也称作符合“叠加原理”。
2 例1(线性与非线性映射的例子)
V
1
∈
R
2
,
V
2
∈
R
2
V_1\in \Bbb R^2,V_2\in \Bbb R^2
V1∈R2,V2∈R2
A
:
[
x
1
x
2
]
↦
[
x
1
+
x
2
x
1
x
2
]
\mathscr A:\begin{bmatrix} x_1 \\ x_2\\ \end{bmatrix}\mapsto \begin{bmatrix} x_1+ x_2\\ x_1x_2\\ \end{bmatrix}
A:[x1x2]↦[x1+x2x1x2] 不是线性映射。
B
:
R
3
→
R
2
\mathscr B: \Bbb R^3\to \Bbb R^2
B:R3→R2
[
x
1
x
2
x
3
]
↦
[
x
1
+
x
2
−
x
3
1
/
2
x
1
−
3
x
2
]
\begin{bmatrix} x_1 \\ x_2\\ x_3\\ \end{bmatrix}\mapsto \begin{bmatrix} x_1+ x_2-x_3\\ 1/2x_1-3x_2\\ \end{bmatrix}
⎣
⎡x1x2x3⎦
⎤↦[x1+x2−x31/2x1−3x2] 是线性映射。
注: 若线性映射
σ
:
V
1
→
V
2
\sigma:V_1\to V_2
σ:V1→V2 是可逆映射(一一对应),则称
σ
\sigma
σ 为线性同构。
回顾:选定一组基,可实现抽象线性空间到标准线性空间的一一对应。(有限维)
3 例2(矩阵与标准线性空间之间的线性映射两事物的等同性)
给定
A
∈
F
m
×
n
A\in \Bbb F^{m\times n}
A∈Fm×n,可构造线性映射
A
A
:
F
n
→
F
m
\mathscr A_A: \Bbb F^{n}\to \Bbb F^{m}
AA:Fn→Fm,即
x
↦
y
=
A
x
x \mapsto y=Ax
x↦y=Ax,(
A
A
(
x
)
=
A
x
\mathscr A_A(x)=Ax
AA(x)=Ax)。
问题:反之,给定映射
A
:
F
n
→
F
m
\mathscr A: \Bbb F^{n}\to \Bbb F^{m}
A:Fn→Fm,是否能找到唯一的矩阵
A
A
A_ \mathscr A
AA,使得
A
A
x
=
A
(
x
)
A_ \mathscr Ax=\mathscr A(x)
AAx=A(x) ?
记
F
n
\Bbb F^{n}
Fn的标准基
E
1
,
E
2
,
⋯
,
E
n
\mathcal E_1,\mathcal E_2,\cdots,\mathcal E_n
E1,E2,⋯,En(单位矩阵的列向量组),构造
A
=
[
A
(
E
1
)
,
A
(
E
2
)
,
⋯
,
A
(
E
n
)
]
A=[\mathscr A(\mathcal E_1),\mathscr A(\mathcal E_2),\cdots,\mathscr A(\mathcal E_n)]
A=[A(E1),A(E2),⋯,A(En)],要验证
A
x
=
A
(
x
)
Ax=\mathscr A(x)
Ax=A(x)。
证明:
A
A
x
=
[
A
(
E
1
)
,
A
(
E
2
)
,
⋯
,
A
(
E
n
)
]
x
=
[
A
(
E
1
)
,
A
(
E
2
)
,
⋯
,
A
(
E
n
)
]
[
x
1
⋮
x
n
]
=
A
(
E
1
)
x
1
+
⋯
+
A
(
E
n
)
x
n
\begin{aligned} A_\mathscr Ax &=[\mathscr A(\mathcal E_1),\mathscr A(\mathcal E_2),\cdots,\mathscr A(\mathcal E_n)]x\\ &=[\mathscr A(\mathcal E_1),\mathscr A(\mathcal E_2),\cdots,\mathscr A(\mathcal E_n)]\begin{bmatrix} x_1 \\ \vdots\\ x_n\\ \end{bmatrix}\\ &=\mathscr A(\mathcal E_1)x_1+\cdots+\mathscr A(\mathcal E_n)x_n \end{aligned}
AAx=[A(E1),A(E2),⋯,A(En)]x=[A(E1),A(E2),⋯,A(En)]⎣
⎡x1⋮xn⎦
⎤=A(E1)x1+⋯+A(En)xn
由于
A
\mathscr A
A 是线性映射,故满足数乘运算规则:
A
(
e
)
k
=
A
(
e
k
)
\mathscr A(e)k=\mathscr A(ek)
A(e)k=A(ek)
故
A
A
x
=
A
(
E
1
x
1
)
+
A
(
E
2
x
2
)
+
⋯
+
A
(
E
n
x
n
)
A_\mathscr Ax=\mathscr A(\mathcal E_1x_1)+\mathscr A(\mathcal E_2x_2)+\cdots+\mathscr A(\mathcal E_nx_n)
AAx=A(E1x1)+A(E2x2)+⋯+A(Enxn)
又
A
\mathscr A
A 满足加法运算规则:
A
(
e
1
)
+
A
(
e
2
)
=
A
(
e
1
+
e
2
)
\mathscr A(e_1)+\mathscr A(e_2)=\mathscr A(e_1+e_2)
A(e1)+A(e2)=A(e1+e2)
因此
A
A
x
=
A
[
E
1
x
1
+
E
2
x
2
+
⋯
+
E
n
x
n
]
=
A
(
[
E
1
,
⋯
,
E
n
]
)
[
x
1
⋮
x
n
]
=
A
(
x
)
\begin{aligned} A_\mathscr Ax&=\mathscr A[\mathcal E_1x_1+\mathcal E_2x_2+\cdots+\mathcal E_nx_n]\\ &=\mathscr A([\mathcal E_1,\cdots,\mathcal E_n])\begin{bmatrix} x_1 \\ \vdots\\ x_n\\ \end{bmatrix}\\ &=\mathscr A(x) \end{aligned}
AAx=A[E1x1+E2x2+⋯+Enxn]=A([E1,⋯,En])⎣
⎡x1⋮xn⎦
⎤=A(x)
得证。
总结:
给定
A
∈
F
m
×
n
A\in \Bbb F^{m\times n}
A∈Fm×n,可构造线性映射
A
A
(
x
)
=
A
x
\mathscr A_A(x)=Ax
AA(x)=Ax;
给定
A
:
F
n
→
F
m
\mathscr A: \Bbb F^{n}\to \Bbb F^{m}
A:Fn→Fm,可构造矩阵
A
=
[
A
(
E
1
)
,
A
(
E
2
)
,
⋯
,
A
(
E
n
)
]
∈
F
m
×
n
A=[\mathscr A(\mathcal E_1),\mathscr A(\mathcal E_2),\cdots,\mathscr A(\mathcal E_n)]\in \Bbb F^{m\times n}
A=[A(E1),A(E2),⋯,A(En)]∈Fm×n。
对标准线性空间而言,任何一个抽象的线性映射
A
\mathscr A
A都可以用一个具体的矩阵去实现
问题:对任意一个线性空间是否都能用矩阵取实现呢?
4 定义(线性映射的矩阵表示)
给定线性映射
A
:
V
→
W
\mathscr A:V\to W
A:V→W,
d
i
m
(
V
)
=
n
dim(V)=n
dim(V)=n,
d
i
m
(
W
)
=
m
dim(W)=m
dim(W)=m。
选取
V
V
V 的基
E
1
,
⋯
,
E
n
\mathcal E_1,\cdots,\mathcal E_n
E1,⋯,En (入口基),
W
W
W 的基
η
1
,
⋯
,
η
n
\eta _1,\cdots,\eta_n
η1,⋯,ηn (出口基)
记第j个入口基向量
E
j
\mathcal E_j
Ej 的像
A
(
E
j
)
\mathscr A(\mathcal E_j)
A(Ej) 在出口基下的坐标为
[
a
1
j
⋮
a
m
j
]
\begin{bmatrix} a_1 j\\ \vdots\\ a_mj\\ \end{bmatrix}
⎣
⎡a1j⋮amj⎦
⎤。即
A
(
E
j
)
=
[
η
1
,
⋯
,
η
n
]
[
a
1
j
⋮
a
m
j
]
\mathscr A(\mathcal E_j)=[\eta _1,\cdots,\eta_n]\begin{bmatrix} a_1 j\\ \vdots\\ a_mj\\ \end{bmatrix}
A(Ej)=[η1,⋯,ηn]⎣
⎡a1j⋮amj⎦
⎤
将它们拼成矩阵
A
=
[
a
11
a
12
⋯
a
1
n
a
21
a
22
⋯
a
2
n
⋮
⋮
⋱
⋮
a
m
1
a
m
2
⋯
a
m
n
]
m
×
n
A=\begin{bmatrix} a_{11} & a_{12}& \cdots &a_{1n} \\ a_{21} & a_{22}& \cdots &a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{m1} & a_{m2}& \cdots &a_{mn} \\ \end{bmatrix}_{m\times n}
A=⎣
⎡a11a21⋮am1a12a22⋮am2⋯⋯⋱⋯a1na2n⋮amn⎦
⎤m×n
则称
A
A
A为
A
\mathscr A
A 在入口基
{
E
j
}
\{\mathcal E_j\}
{Ej} 和出口基
{
η
i
}
\{\eta_i\}
{ηi} 下的矩阵表示。
总结:
A
[
E
1
,
⋯
,
E
n
]
=
[
η
1
,
⋯
,
η
m
]
A
\mathscr A[\mathcal E_1,\cdots,\mathcal E_n]=[\eta _1,\cdots,\eta_m]A
A[E1,⋯,En]=[η1,⋯,ηm]A
[
线性映射
]
[
入口基矩阵
]
=
[
出口基矩阵
]
[
矩阵表示
]
{[线性映射][入口基矩阵]=[出口基矩阵][矩阵表示]}
[线性映射][入口基矩阵]=[出口基矩阵][矩阵表示]
5 定理(用坐标计算线性映射)
已知
A
[
E
1
,
⋯
,
E
n
]
=
[
η
1
,
⋯
,
η
m
]
A
\mathscr A[\mathcal E_1,\cdots,\mathcal E_n]=[\eta _1,\cdots,\eta_m]A
A[E1,⋯,En]=[η1,⋯,ηm]A
A
:
V
→
W
\mathscr A:V\to W
A:V→W。
给定
v
∈
V
v\in V
v∈V,
v
v
v在
{
E
j
}
\{\mathcal E_j\}
{Ej} 下的坐标为
x
x
x,则
A
(
v
)
\mathscr A(v)
A(v) 在
{
η
i
}
\{\eta_i\}
{ηi} 下的坐标为
A
x
Ax
Ax。
证明:
v
=
[
E
1
,
⋯
,
E
n
]
x
v=[\mathcal E_1,\cdots,\mathcal E_n]x
v=[E1,⋯,En]x
A
(
v
)
=
A
(
E
1
x
1
+
⋯
+
E
n
x
n
)
=
A
(
E
1
)
x
1
+
⋯
+
A
(
E
n
)
x
n
=
[
A
(
E
1
)
,
⋯
,
A
(
E
n
)
]
x
=
[
η
1
,
⋯
,
η
m
]
A
x
=
[
η
1
,
⋯
,
η
m
]
(
A
x
)
\begin{aligned} \mathscr A(v)&=\mathscr A(\mathcal E_1x_1+\cdots+\mathcal E_nx_n)\\ &=\mathscr A(\mathcal E_1)x_1+\cdots+\mathscr A(\mathcal E_n)x_n\\ &=[\mathscr A(\mathcal E_1),\cdots,\mathscr A(\mathcal E_n)]x\\ &=[\eta_1,\cdots,\eta_m]Ax\\ &=[\eta_1,\cdots,\eta_m](Ax) \end{aligned}
A(v)=A(E1x1+⋯+Enxn)=A(E1)x1+⋯+A(En)xn=[A(E1),⋯,A(En)]x=[η1,⋯,ηm]Ax=[η1,⋯,ηm](Ax)
6 三个举例
6.1 微分算子的矩阵表示
D
:
R
4
[
x
]
→
R
3
[
x
]
\mathscr D:\Bbb R_4[x]\to R_3[x]
D:R4[x]→R3[x]
入口基:
1
,
x
,
x
2
,
x
3
1,x,x^2,x^3
1,x,x2,x3
出口基:
1
,
x
,
x
2
1,x,x^2
1,x,x2
D
[
1
,
x
,
x
2
,
x
3
]
=
[
1
,
x
,
x
2
]
[
0
1
0
0
0
0
2
0
0
0
0
3
]
3
×
4
\mathscr D[1,x,x^2,x^3]=[1,x,x^2]\begin{bmatrix} 0&1& 0 &0 \\ 0 & 0& 2 &0 \\ 0 & 0 & 0& 3 \\ \end{bmatrix}_{3\times4}
D[1,x,x2,x3]=[1,x,x2]⎣
⎡000100020003⎦
⎤3×4
例如:
D
(
1
2
x
3
+
5
x
)
\mathscr D(\frac{1}{2}x^3+5x)
D(21x3+5x)
(1) 原像在
(
1
,
x
,
x
2
,
x
3
)
(1,x,x^2,x^3)
(1,x,x2,x3)下的坐标为
[
0
5
0
1
2
]
\begin{bmatrix} 0\\ 5\\ 0 \\ \frac{1}{2}\\ \end{bmatrix}
⎣
⎡05021⎦
⎤。
(2) 矩阵乘法
A
x
=
[
0
1
0
0
0
0
2
0
0
0
0
3
]
[
0
5
0
1
2
]
=
[
5
0
3
2
]
Ax=\begin{bmatrix} 0&1& 0 &0 \\ 0 & 0& 2 &0 \\ 0 & 0 & 0& 3 \\ \end{bmatrix}\begin{bmatrix} 0\\ 5\\ 0 \\ \frac{1}{2}\\ \end{bmatrix}=\begin{bmatrix} 5\\ 0\\ \frac{3}{2} \\ \end{bmatrix}
Ax=⎣
⎡000100020003⎦
⎤⎣
⎡05021⎦
⎤=⎣
⎡5023⎦
⎤。
(3) 求像
[
1
,
x
,
x
2
]
[
5
0
3
2
]
=
5
+
3
2
x
2
[1,x,x^2]\begin{bmatrix} 5\\ 0\\ \frac{3}{2} \\ \end{bmatrix}=5+\frac{3}{2}x^2
[1,x,x2]⎣
⎡5023⎦
⎤=5+23x2。
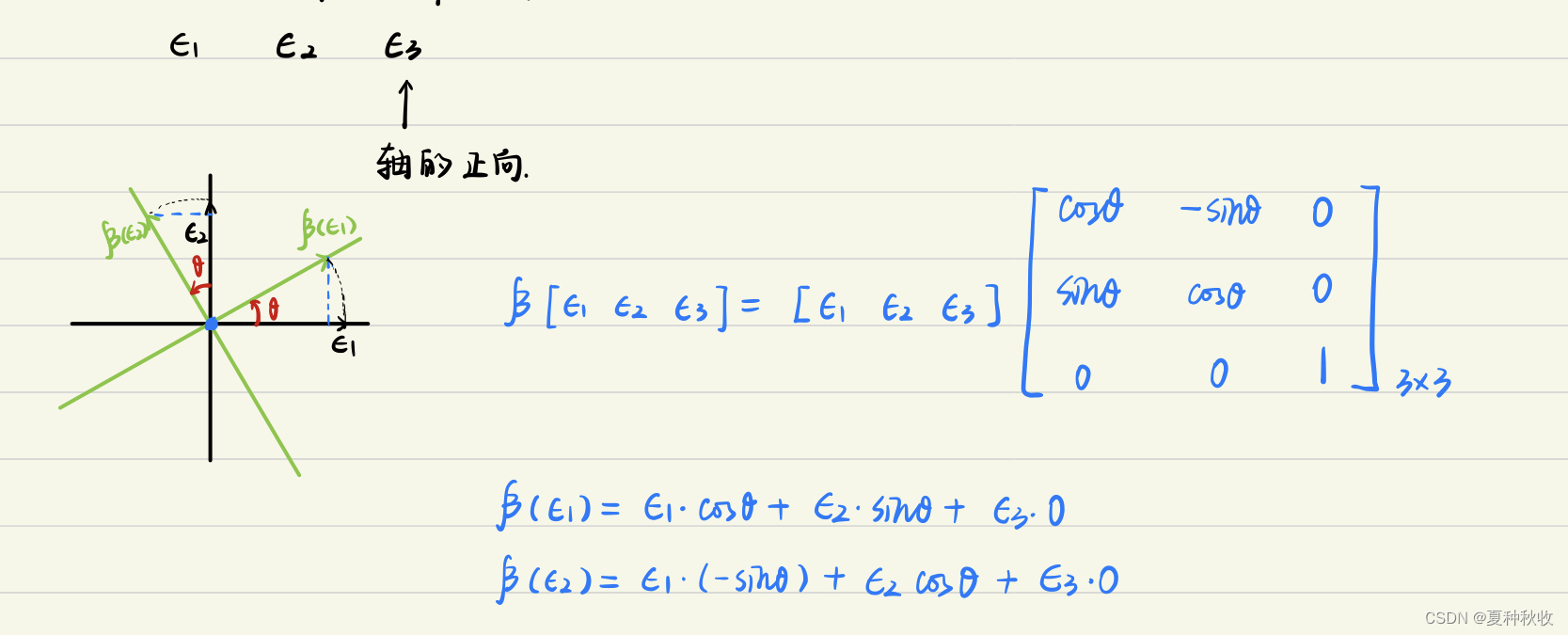
6.2 旋转变换的矩阵表示
几何空间绕固定轴旋转角度
θ
\theta
θ,求旋转运动的矩阵表示。入口和出口都是三维几何空间。
6.3 镜面反射的矩阵表示
选基
[
E
1
,
E
2
,
E
3
]
[\mathcal E_1,\mathcal E_2,\mathcal E_3]
[E1,E2,E3],其中
E
3
\mathcal E_3
E3 是镜面反射的正方向。
A
[
E
1
,
E
2
,
E
3
]
=
[
E
1
,
E
2
,
E
3
]
[
1
0
0
0
1
0
0
0
−
1
]
3
×
3
\mathscr A[\mathcal E_1,\mathcal E_2,\mathcal E_3]=[\mathcal E_1,\mathcal E_2,\mathcal E_3]\begin{bmatrix} 1& 0 &0 \\ 0& 1&0 \\ 0 & 0 & -1 \\ \end{bmatrix}_{3\times 3}
A[E1,E2,E3]=[E1,E2,E3]⎣
⎡10001000−1⎦
⎤3×3
7 小节
(1)基实现了抽象线性空间到标准线性空间的一一对应
抽象向量
→
选基
坐标向量
\begin{CD} 抽象向量 @>{\text{选基}}>> 坐标向量 \end{CD}
抽象向量选基坐标向量
V
→
{
E
j
}
F
n
\begin{CD} V @>{\text{$\{\mathcal E_j\}$}}>>\Bbb F^n \end{CD}
V{Ej}Fn
W
→
{
η
i
}
F
m
\begin{CD} W @>{\text{$\{\eta_i\}$}}>>\Bbb F^m \end{CD}
W{ηi}Fm
(2)矩阵与标准线性空间之间的线性映射的等同性
F
n
→
A
F
m
\begin{CD} \Bbb F^n @>{\text{$A$}}>>\Bbb F^m \end{CD}
FnAFm
(3)线性映射的矩阵表示
A
[
E
1
,
⋯
,
E
n
]
=
[
η
1
,
⋯
,
η
m
]
A
\mathscr A[\mathcal E_1,\cdots,\mathcal E_n]=[\eta _1,\cdots,\eta_m]A
A[E1,⋯,En]=[η1,⋯,ηm]A
(4)用坐标计算线性映射
v
→
A
A
(
v
)
在入口基下的坐标
↓
x
→
y
=
A
x
\begin{CD} v @>\mathscr A>> \mathscr A(v)\\ @V在入口基下的坐标V V @.\\ x @>>>y=Ax \end{CD}
v在入口基下的坐标↓
⏐xAA(v) y=Ax实现了用
y
=
A
x
y=Ax
y=Ax 表示抽象线性空间中的线性映射
A
\mathscr A
A。
(5) 线性映射交换图
V
→
A
W
∥
一一对应
∥
F
n
→
A
F
n
V
同构于
F
n
\begin{CD} V@>{\mathscr A}>> W \\ @|{一一对应}@| \\ \Bbb F^n @>A>> \Bbb F^n \\ @. @. V同构于F^n @. W同构于F^m \end{CD}
V∥
∥Fn A一一对应AW∥
∥Fn V同构于Fn
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









