







一、介绍
摄像头模组,全称Camera Compact Module,简写为CCM。CCM 包含几大件: 镜头(lens)、音圈马达(VCM)、传感器(sensor)、软板(FPC)、图像处理芯片(DSP)。
工作原理:物体通过镜头(lens)聚集的光,通过CMOS或CCD集成电路,把光信号转换成电信号,再经过内部图像处理器(ISP)转换成数字图像信号输出到数字信号处理器(DSP)加工处理,转换成标准的GRB、YUV等格式图像信号。
摄像头模组主要由以下几个部分组成:
镜头(Lens):将光线汇聚到图像传感器上。
音圈马达(VCM):完成摄像头的自动对焦。
红外滤光片(IR-cut Filter):滤除人眼的非可见光。
图像传感器(Sensor):将光信号转换成电信号。
柔性印制电路板(FPCB):将摄像头模组与主处理器连接起来,并进行数据传输。
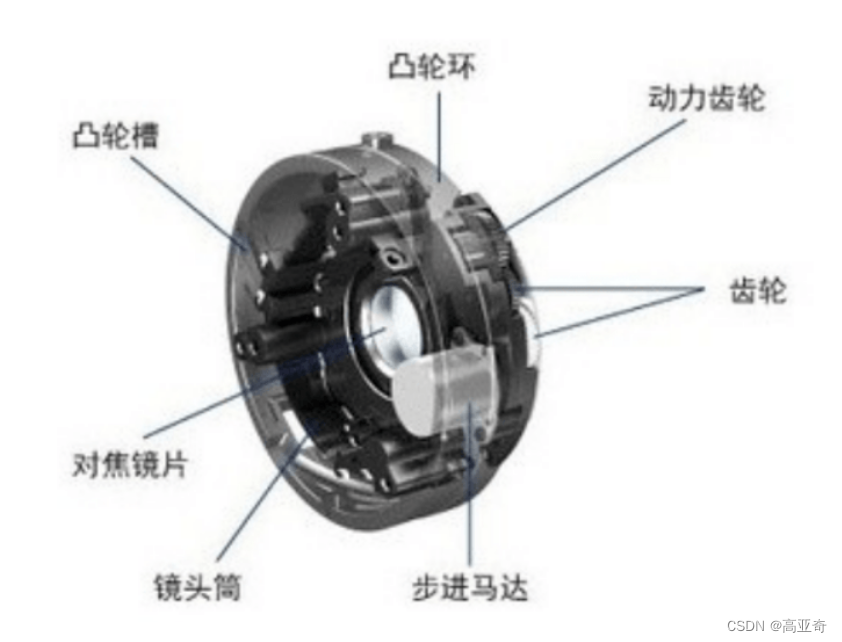
下图是一个常见的手机摄像头模组的几个核心部件的结构。
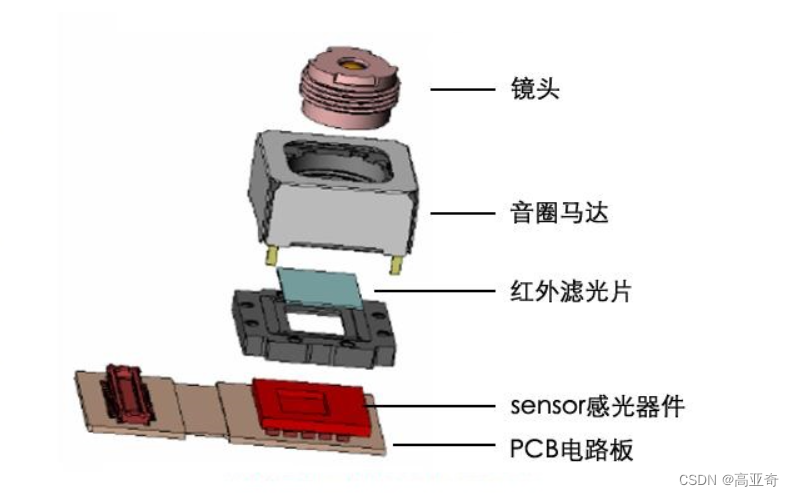
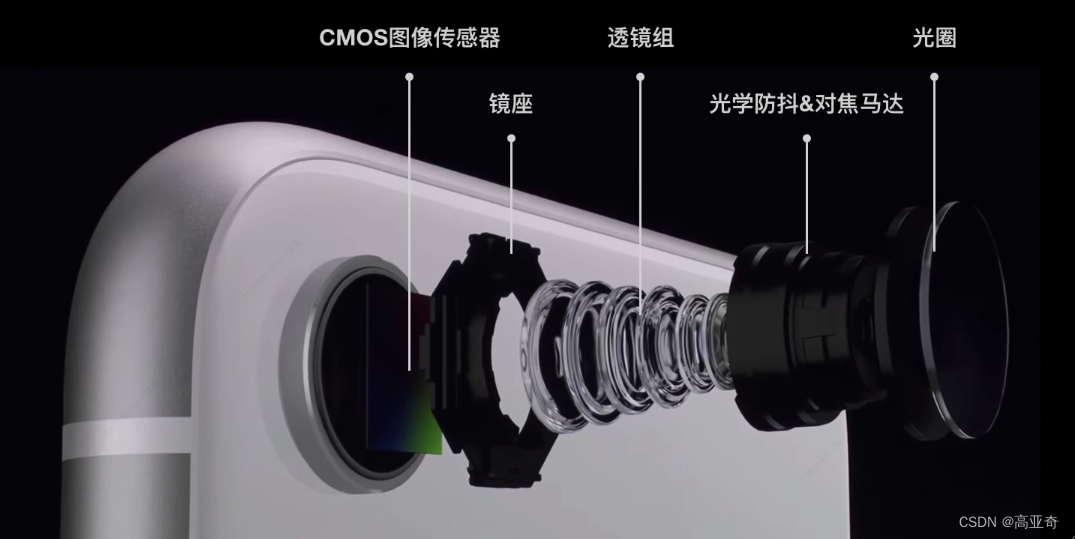
手机相机镜头的硬件构成图
二、组成
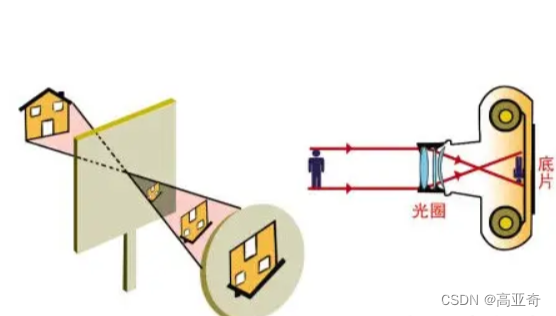
1. 镜头
镜头(Lens)的主要作用就是将外界采集的光线汇聚到图像传感器上,其原理就是小孔成像,搭配不同的透镜,使光线聚焦到镜头底部的感光芯片上(也就是sensor上),形成图像。
现代镜头一般都由几片透镜一起组成,以实现更复杂的成像效果。透镜分为玻璃(Glass)材质和塑料(Plastic)材质,譬如2G2P就表示这组镜头由两片玻璃透镜和两片塑料透镜构组成,一般玻璃镜头的成像效果更好,价格也更昂贵一些。

2. VCM(Voice Coil Motor)音圈马达
全称Voice Coil Montor,电子学里面的音圈电机,是马达的一种。因为原理和扬声器类似,所以叫音圈电机,具有高频响、高精度的特点。其主要原理是在一个永久磁场内,通过改变马达内线圈的直流电流大小,来控制弹簧片的拉伸位置,从而带动上下运动。手机摄像头广泛的使用VCM实现自动对焦功能,通过VCM可以调节镜头的位置,呈现清晰的图像。
在一个永久磁场内放置一个线圈,线圈通电后会产生磁场(安培定则),从而与外围的永久磁铁产生引力或斥力,导致线圈受力移动。如果把镜头安置在线圈上,则可以通过改变电流大小线圈带动镜头前后运动,从而控制镜头的位置,完成对焦的功能。
VCM通常搭配VCM Driver IC(VCM驱动芯片)、AF(Auto Focus,自动对焦)算法一起使用。首先,Sensor采集的图像输入到ISP中,由ISP中的AF算法计算当前图像的焦点步数,并通过I2C传输给Driver IC,Driver IC据此计算出移动线圈到该位置所需要的电流大小,从而精确的控制镜头的行为,达到自动对焦的效果。当然,该方法也可以实现光学防抖(Optical Image Stabilizer,OIS)的效果,其原理是相同的。

VCM性能指标
VCM的性能主要是看电流和行程距离的比值。从启动电流开始,电流上升要和所能驱动的行程距离成比例,所需要上升电流越小,精度越高,同时还看最大耗电量,最大功率,尺寸大小。
VCM分类
从结构上大致可分三类: (1)弹片式结构 ;(2)滚珠式结构; (3)摩擦式结构。
从功能上大致分为五类: (1)Open loop开马达; (2)Close loop闭环马达 ;(3)Alternate中置马达 ;(4)OIS光学防抖马达(分平移式、移轴式、记忆金属式等);(5) OIS+Close loop六轴马达 。
AF原理
进入自动调焦模式后,Driver从0到最大值,使得镜头从原地移动到最大位移处,此时sensor成像面自动拍摄图片并保存到DSP内,DSP通过这些图片,计算每一副图片的MTF(Modulation transfer function)值,从而在这条MTF曲线中找到最大值,并通过算法,得到这个点对应的电流大小,再一次指示Driver提供给音圈这个电流,而使镜头稳定在这个成像面,使得达到自动变焦。
变焦和对焦
A:实现光学变焦采用变焦马达(ZOOM)
通过移动镜头内部的镜片来改变焦点的位置,改变镜头焦距的长短,并改变镜头的视角大小,从而实现影响的放大与缩小。
B:实现自动对焦采用对焦马达(AF)
过微距离移动整个镜头(而不是镜头内的镜片)的位置,控制镜头焦距的长短,而实现影像 的清晰.手机中常用的方法。
光学对焦和光学变焦是不同的概念:
光学变焦是通过移动镜头内部镜片的相对位置来改变焦点的位置,改变镜头焦距的长短,并改变镜头的视角大小,从而实现影像的放大与缩小;
光学对焦是实际上是调整整个镜头的位置(而不是镜头内的镜片)的位置,来控制像距,从而使成像最清晰。
3. 红外滤光片
红外滤光片(IR-cut Filter)的作用就是滤除红外光。人眼和电子感光器件能感受到的光的波长范围不同,电子感光器件感受到的光波长范围远大于人类,因此,要滤除掉人眼无法感受到的光线,以防止它们造成偏色、波纹现象,提高色彩还原度。这会对后续的ISP tuning工作造成很大影响。
IR-cut滤光片分为普通IR和蓝玻璃IR两大类,前者将红外光和紫外光反射掉,是其不进入Sensor,后者将红外光和紫外光吸收掉,使其不进入Sensor。前者容易使红外光产生多次反射,从而造成光晕现象(Shading),使最终成像效果产生较大的色差。后者虽然没有此问题,效果更好,但成本也是前者的十倍。
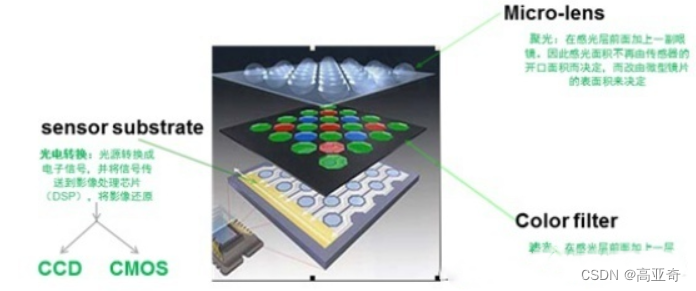
4. 图像传感器(Image Sensor)
图像传感器(Image Sensor)是整个模组中的核心部件,也是本次介绍的重点,它是一种半导体芯片,其表面由几十万到几百万个光电二极管,这些光电二极管受到光照时会产生电荷,从而将将镜头采集到的光信号转换成电信号。因此,如果说Lens的作用相当于人眼球的晶状体,那么Sensor的作用就类似视网膜,Sensor上的感光二极管就是视网膜上的视觉细胞。
Sensor主要用于将收集到的外界光信号转换成电信号,供后续电子系统进行处理和存储。Sensor的感光单元,也就是每个像素单元,会排列成像素阵列,上面分布着感光二极管。这些二极管会在受到外界的光刺激后,会根据光照强度产生不同强弱的电信号,再经过内部的A/D转换离散成数字信号。
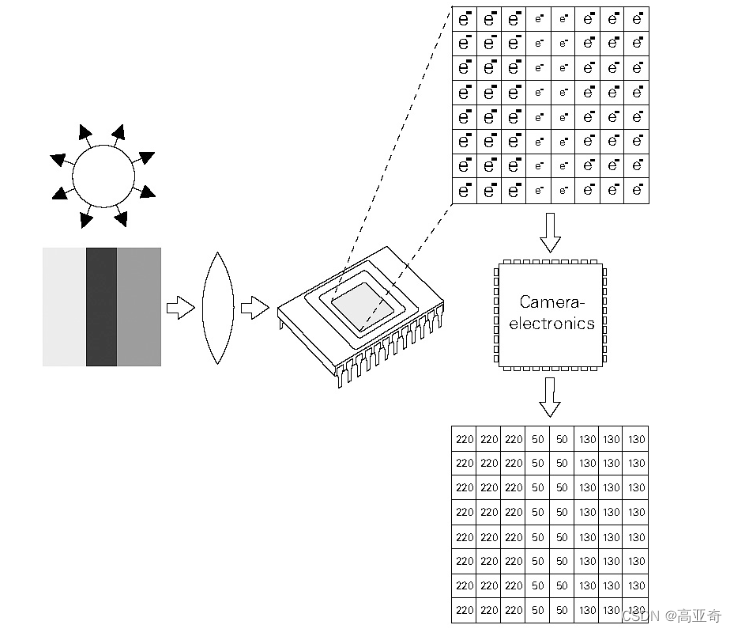
光电二极管可以粗略地看成一个电容,受到的关照越强,则同一时间内积压在电容上的电荷越多,产生的电压就越大。如果将电容两端的电压通过A/D转换成数字信号,可以得到一个数字化后的值,所有的像素组合在一起可以得到一张灰度图。光照越强,这个数值越大,则像素越靠近白色;光照越弱,这个数值越小,则像素越靠近黑色。这与我们平常的认知也是一致的。
根据感光二极管种类的不同,可以将市面上广泛使用的Sensor分为CCD Sensor和CMOS Sensor两类。CCD是Charge Coupled Device,即电荷耦合器件;CMOS是Complementary Metal Oxide Semicondutor,即互补金属氧化物半导体。两种半导体的具体感光原理不是本文的重点探讨内容,不再详述。目前,CMOS Sensor由于功率更小、处理速度更快、制造成本更低的优势,基本上已经顶替了过去的CCD Sensor的地位,尤其是在手机和移动设备领域基本上已经一统江湖了。不过CCD Sensor的优势是在弱光条件下表现更良好,不会像CMOS一样受到数字噪声的影响,不会那么依赖ISP的去噪工作。
Image sensor(图像传感器)是一种半导体芯片,其表面有几百万到几千万个光电二极管,光电二极管受到光照就会产生电荷,将光线转换成电信号。其功能类似于人的眼睛,因此sensor性能的好坏将直接影响到camera的性能。
4.1 Sensor结构
4.2分类
感光原件:CCD、CMOS(PPS和APS)
不同工艺:前照式FSI、背照式BSI、堆栈式
4.3 指标
1.像素
传感器上有许多感光单元,它们可以将光线转换成电荷,从而形成对应于景物的电子图像。而在传感器中,每一个感光单元对应一个像素(Pixels),像素越多,代表着它能够感测到更多的物体细节,从而图像就越清晰,像素越高,意味着成像效果越清晰。摄像机分辨率的乘积就是像素值,例如:1280×960=1228800
2.靶面尺寸
图像传感器感光部分的大小,一般用英寸来表示。和电视机一样,通常这个数据指的是这个图像传感器的对角线长度,如 常见的有1/3英寸,靶面越大,意味着通光量越好,而靶面越小则比较容易获得更大的景深。
3.感光度
即是通过CCD或CMOS以及相关的电子线路感应入射光线的强弱。感光度越高,感光面对光的敏感度就越强,快门速度就越高,这在拍摄运动车辆,夜间监控的时候尤其显得重要。
4.电子快门
是比照照相机的机械快门功能提出的一个术语。其控制图像传感器的感光时间,由于图像传感器的感光值就是信号电荷的积累,感光越长,信号电荷积累时间也越长,输出信号电流的幅值也越大。电子快门越快,感光度越低,适合在强光下拍摄。
5.帧率
既指单位时间所记录或者播放的图片的数量。连续播放一系列图片就会产生动画效果,根据人类的视觉系统,当图片的播放速度大于15幅/秒(即15帧)的时候, 人眼就基本看不出来图片的跳跃;在达到24幅/s——30幅/s(即24帧到30帧)之间时就已经基本觉察不到闪烁现象了。
每秒的帧数(fps)或者说帧率表示图形传感器在处理场时每秒钟能够更新的次数。高的帧率可以得到更流畅、更逼真的视觉体验。
6.信噪比
是信号电压对于噪声电压的比值,信噪比的单位用dB来表示。一般摄像机给出的信噪比值均是AGC(自动增益控制)关闭时的值,因为当AGC接通时,会对小信号进行提升,使得噪声电平也相应提高。
信噪比的典型值为45——55dB,若为50dB,则图像有少量噪声,但图像质量良好;若为60dB,则图像质量优良,不出现噪声,信噪比越大说明对噪声的控制越好。这个参数关系的图像中噪点的数量,信噪比越高,给人感觉画面越干净,夜视的画面中点状的噪点就越少。
4.4 ISP
4.4.1 RAW DATA数据
Sensor 将从 lens 上传导过来的光线转换为电信号, 再通过内部的 AD 转换为数字信号。 由于 Sensor 的每个 pixel 只能感光 R 光或者 B 光或者 G 光, 因此每个像素此时存贮的是单色的, 我们称之为 RAW DATA 数据。 要想将每个像素的 RAW DATA 数据还原成三基色,就需要 ISP 来处理。
4.4.2 ISP 处理
ISP(图像信号处理) 主要完成数字图像的处理工作,把 sensor 采集到的原始数据转换为算法支持的格式。
具体的流程:
1、外部光线穿过 lens 后, 经过 color filter 滤波后照射到 Sensor 面上;
2、Sensor 将从 lens 上传导过来的光线转换为电信号,再通过内部的 AD 转换为数字信号。
3.1、如果 Sensor 没有集成 ISP,直接通过传输线进行基带传输 (基带就是基本频带,具体见《通信原理》;另一种就是方式调制传输),此时的数据格式是 RAW DATA。
3.2、如果集成 了 ISP, RAW DATA 数据经过 AWB(自动白平衡)、 则 color matrix、 lens shading、 gamma、 sharpness、 AE(自动曝光控制)和 de-noise (降噪)处理,后输出 YUV 或者 RGB 格式的数据。
4.4.3《通信原理》——基带
基带英文全称Baseband,也可以翻译为“信源”(信息源,也称发终端)发出的没有经过调制(进行频谱搬移和变换)的原始电信号所固有的频带(频率带宽),称为基本频带,简称基带。 基带和频带相对应,频带:对基带信号调制前所占用的频率带宽(一个信号所占有的从最低的频率到最高的频率之差)。
5 、DSP
数字信号处理器DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通过一系列复杂的数学算法运算,对数字图像信号参数进行优化处理,并把处理后的信号通过USB等接口传到PC等设备
DSP和ISP区别
名词解释:
ISP 是Image Signal Processor 的简称,也就是图像信号处理器。
DSP是Digital Signal Processor 的缩写,也就是数字信号处理器。
功能解释:
ISP一般用来处理Image Sensor(图像传感器)的输出数据,如做AEC(自动曝光控制)、AGC(自动增益控制)、AWB(自动白平衡)、色彩校正、Lens Shading、Gamma 校正、祛除坏点、Auto Black Level、Auto White Level 等等功能的处理。(具体在:https://blog.csdn.net/djfjkj52/article/details/115324741 进行讲解“摄像头自动曝光,自动对焦,自动白平衡,ISP,图像处理及色彩模型,色彩空间”)
DSP功能就比较多了,它可以做些拍照以及回显(JPEG的编解码)、录像以及回放(Video 的编解码)、H.264的编解码、还有很多其他方面的处理,总之是处理数字信号了。
6. 柔性印制电路板
柔性印制电路板(Flexible Printed Circuit Board,FPCB)的主要作用是将组件与主处理器连接起来,同时完成Sensor与主处理器之间的原始数据传输功能。


7. 手机相机的成像过程
手机相机的链路

先来整体看一下手机相机的链路,总共有5步,本篇文章会针对前3部分(硬件部分)进行讲解 :
Camera Lens : 手机相机镜头,光线通过透镜,到达COMS图像传感器
Image Sensor : CMOS图像传感器会将光信号转化为电信号,再通过内部的ADC转化为数字信号
ISP : 数字信号会传输给ISP进行处理,主要进行矫正、白平衡、曝光控制等
SOC : 这一步就在应用层了(比如App),通过CPU和GPU对图像数据进行后处理,比如添加滤镜等操作
Display : 最终将图像数据显示到屏幕上
Camera Lens手机镜头示意图: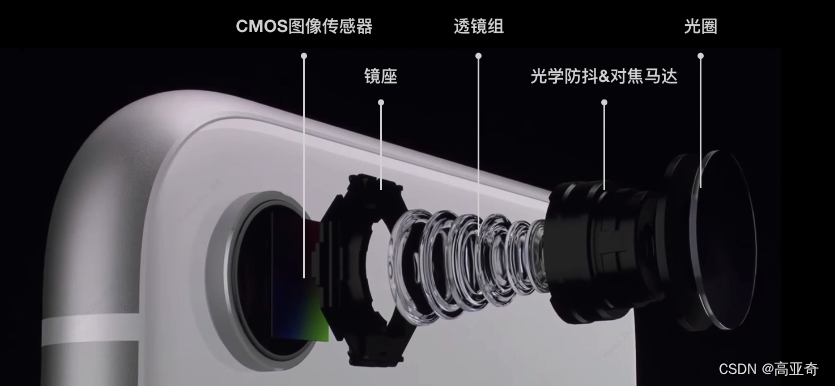


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











