









收藏和点赞,您的关注是我创作的动力
概要
随着微电子技术和计算机技术的迅速发展,PLC(即可编程控制器)在工业控制领域内得到十分广泛地应用。PLC是一种基于数字计算机技术、专为在工业环境下应用而设计的电子控制装置,它采用可编程序的存储器,用来存储用户指令,通过数字或模拟的输入/输出,完成一系列逻辑、顺序、定时、记数、运算等确定的功能,来控制各种类型的机电一体化设备和生产过程。本文介绍了利用可编程控制器编写的一个五层电梯的控制系统,检验电梯PLC控制系统的运行情况。实践证明,PLC可遍程控制器和MCGS组态软件结合有利于PLC控制系统的设计、检测,具有良好的应用价值。
一、系统总体设计
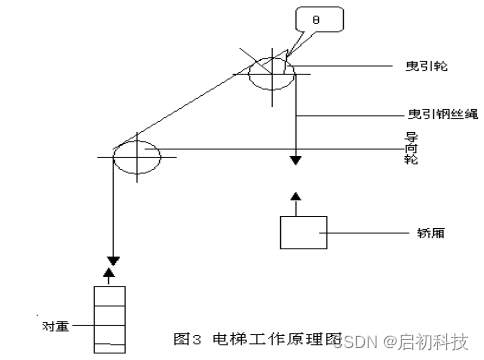
1 电梯的工作原理
当曳引机组的曳引轮旋转时,依靠嵌在曳引轮槽中的钢丝绳与曳引槽之间的摩擦力,驱动钢丝绳来升降轿厢,曳引钢丝绳一端挂着轿厢,另一端悬挂对重,产生拉力分别为S1和S2。当S1和S2的差值等于或小于绳槽之间摩擦力时,电梯正常运行,绳槽之间无打滑现象。具体图形见下图
曳引钢丝绳与曳引轮槽不打滑的条件是:
(1)当轿厢满载,并以额定速度下降制动时: (式1)
式中:S1曳引钢丝绳轿厢一边的拉力(N);S2曳引钢丝绳对重一边的拉力(N);θ曳引绳在曳引轮上的包角,一般;复绕时,计算时用弧度值
自然对数底数=2.71828;钢丝绳与曳引轮槽间的当量摩擦系数,它的大小与轮槽的形型尺寸及钢丝绳和轮间的摩擦系数有关,常取
(式2)
式中,sin,sin,sin2,sin2中的,的值用角度值代入;2,2中的值用弧度值代入。;。
式(1)中的,
上式中:G-轿厢自重(N);Q-额定载重量(N);W-对重装置重量(N);-电梯加速度。
(2)当轿厢空载时,以额定速度上升制动时,
(式3), ,
2 PLC控制电梯的设计
随着城市建设的不断发展,高层建筑不断增多,电梯在国民经济和生活中有着广泛的应用。电梯作为高层建筑中垂直运行的交通工具已与人们的日常生活密不可分。实际上电梯是根据外部呼叫信号以及自身控制规律等运行的,而呼叫是随机的,电梯实际上是一个人机交互式的控制系统,单纯用顺序控制或逻辑控制是不能满足控制要求的,因此,电梯控制系统采用随机逻辑方式控制。目前电梯的控制普遍采用了两种方式,一是采用微机作为信号控制单元,完成电梯信号的采集、运行状态和功能的设定,实现电梯的自动调度和集选运行功能,拖动控制则由变频器来完成;第二种控制方式用可编程控制器(PLC)取代微机实现信号集选控制。从控制方式和性能上来说,这两种方法并没有太大的区别。国内厂家大多选择第二种方式,其原因在于生产规模较小,自己设计和制造微机控制装置成本较高;而PLC可靠性高,程序设计方便灵活,抗干扰能力强、运行稳定可靠等特点,所以现在的电梯控制系统广泛采用可编程控制器来实现。
3 电梯运行的理想曲线
根据大量的研究和实验表明,人可接受的最大加速度为am≤1.5m/s2,加速度变化率ρm≤3m/s3,电梯的理想运行曲线按加速度可划分为三角形、梯形和正弦波形,由于正弦波形加速度曲线实现较为困难,而三角形曲线最大加速度和在启动及制动段的转折点处的加速度变化率均大于梯形曲线,即+ρm跳变到-ρm或由-ρm跳变到+ρm的加速度变化率,故很少采用,因梯形曲线容易实现并且有良好加速度变化率频繁指标,故被广泛采用,采用梯形加速度曲线电梯的理想运行曲线如图7所示:

智能变频器是为电梯的灵活调速、控制及高精度平层等要求而专门设计的电梯专用变频器,可配用通用的三相异步电动机,并具有智能化软件、标准接口、菜单提示、输入电梯曲线及其它关键参数等功能。其具有调试方便快捷,而且能自动实现单多层功能,并具有自动优化减速曲线的功能,由其组成的调速系统的爬行时间少,平层距离短,不论是双绕组电动机,还是单绕组电动机均可适用,其最高设计速度可达4m/s,其独特的电脑监控软件,可选择串行接口实现输入/输出信号的无触点控制。变频器构成的电梯系统,当变频器接收到控制器发出的呼梯方向信号,变频器依据设定的速度及加速度值,启动电动机,达到最大速度后,匀速运行,在到达目的层的减速点时,控制器发出切断高速度信号,变频器以设定的减速度将最大速度减至爬行速度,在减速运行过程中,变频器的能够自动计算出减速点到平层点之间的距离,并计算出优化曲线,从而能够按优化曲线运行,使低速爬行时间缩短至0.3s,在电梯的平层过程中变频器通过调整平层速度或制动斜坡来调整平层精度。即当电梯停得太早时,变频器增大低速度值或减少制动斜坡值,反之则减少低速度值或增大制动斜坡值,在电梯到距平层位置4—10cm时,有平层开关自动断开低速信号,系统按优化曲线实现高精度的平层,从而达到平层的准确可靠。
①电梯速度曲线:电梯运行的舒适性取决于其运行过程中加速度a和加速度变化率p的大小,过大的加速度或加速度变化率会造成乘客的不适感。同时,为保证电梯的运行效率,a、p的值不宜过小。能保证a、p最佳取值的电梯运行曲线称为电梯的理想运行曲线。电梯运行的理想曲线应是抛物线-直线综合速度曲线,即电梯的加、减过程由抛物线和直线构成。电梯给定曲线是否理想,直接影响实际的运行曲线。
②速度曲线产生方法:采用的FX2-64MRPLC,并考虑输入输出点要求增加了FX-8EYT、FX-16EYR、FX-8EYR三个扩展模块和FX2-40AW双绞线通信适配器,FX2-40AW用于系统串行通信。利用PLC扩展功能模块D/A模块实现速度理想曲线输出,事先将数字化的理想速度曲线存入PLC寄存器,程序运行时,通过查表方式写入D/A,由D/A转换成模拟量后将速度理想曲线输出。
③加速给定曲线的产生:8位D/A输出0~5V/0~10V,对应数字值为16进制数00~FF,共255级。若电梯加速时间在2.5~3秒之间。按保守值计算,电梯加速过程中每次查表的时间间隔不宜超过10ms。由于电梯逻辑控制部分程序最大,而PLC运行采用周期扫描机制,因而采用通常的查表方法,每次查表的指令时间间隔过长,不能满足给定曲线的精度要求。在PLC运行过程中,其CPU与各设备之间的信息交换、用户程序的执行、信号采集、控制量的输出等操作都是按照固定的顺序以循环扫描的方式进行的,每个循环都要对所有功能进行查询、判断和操作。这种顺序和格式不能人为改变。通常一个扫描周期,基本要完成六个步骤的工作,包括运行监视、与编程器交换信息、与数字处理器交换信息、与通讯处理器交换信息、执行用户程序和输入输出接口服务等。在一个周期内,CPU对整个用户程序只执行一遍。这种机制有其方便的一面,但实时性差。过长的扫描时间,直接影响系统对信号响应的效果,在保证控制功能的前提下,最大限度地缩短CPU的周期扫描时间是一个很复杂的问题。一般只能从用户程序执行时间最短采取方法。电梯逻辑控制部分的程序扫描时间已超过10ms,尽管采取了一些减少程序扫描时间的办法,但仍无法将扫描时间降到10ms以下。同时,制动段曲线采用按距离原则,每段距离到的响应时间也不宜超过10ms。为满足系统的实时性要求,在速度曲线的产生方式中,采用中断方法,从而有效地克服了PLC扫描机制的限制。起动加速运行由定周期中断服务程序完成。这种中断不能由程序进行开关,一旦设定,就一直按设定时间间隔循环中断,所以,起动运行条件需放在中断服务程序中,在不满足运行条件时,中断即返回。
④减速制动曲线的产生:为保证制动过程的完成,需在主程序中进行制动条件判断和减速点确定。在减速点确定之前,电梯一直处于加速或稳速运行过程中。加速过程由固定周期中断完成,加速到对应模式的最大值之后,加速程序运行条件不再满足,每次中断后,不再执行加速程序,直接从中断返回。电梯以对应模式的最大值运行,在该模式减速点到后,产生高速计数中断,执行减速服务程序。在该中断服务程序中修改计数器设定值的条件,保证下次中断执行。在PLC的内部寄存器中,减速曲线表的数值由大到小排列,每次中断都执行一次“表指针加1”操作,则下一次中断的查表值将小于本次中断的查表值。门区和平层区的判断均由外部信号给出,以保证减速过程的可靠性。
二、电梯外部操作与显示PLC程序
功能要求
①外部呼叫
电梯外部呼叫也类似的。一个呼叫灯的接通对应于相应的外部呼叫接通,其关闭条件为相应行程开关闭合。相应的升降指示灯闭合。另外,外部呼叫同样有保持特性,故也应使用保持继电器作为输出。需要指出的是第一,第五层的呼叫是单向的,故其关闭条件也相应变为行程开关闭合”AND”电梯升降断开,故得程序如图15层以2层为例
1层电梯呼叫程序如下
下降与上呼叫类似,不同之处在于关闭条件中的Y10(上升指示)应换为Y11(下降指示)
②楼层的电梯位置指示灯
外部楼层的电梯位置指示灯与电梯内的位置指示灯相同,这里不再赘述
③电梯的上升与下降
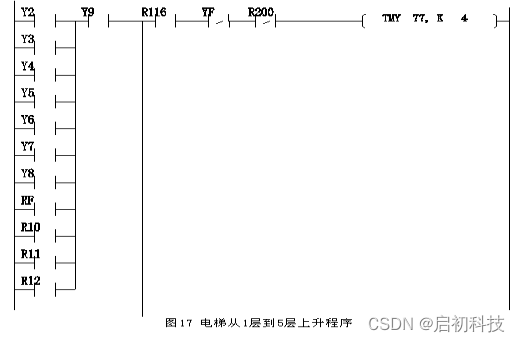
电梯上升降编程与电梯的升降指示灯编程思路类似,但其中也有一些不同。电梯上升时设电梯从1层到5层上升。由于电梯在第一层,此时构成电梯上升的因素包括:2层上/下呼叫,3层上/下呼叫,4层上/下呼叫,5层下呼叫,内2层呼叫灯,内3层呼叫灯,内4层呼叫灯,内5层呼叫灯,这11种条件对于电梯的上升是一种逻辑”OR”的关系,而这些条件的产生的前提条件则是电梯此时在1层,即1层位灯Y9有输出。可见Y9与前11个”OR”逻辑是”AND”的关系。电梯从1层到5层上升的梯形图如图3-10所示
电梯由2层上升到5层,3层上升到5层,4层上升到5层的编程思路与1层上升到5层类似,不同之处为上升条件同某层位灯逻辑”AND”运算之后还应排除电梯下降指示的情况,这里将电梯下降指示Y11的常闭触点与之串联。另外由于电梯上升,电梯门应关门,电梯下降线圈YF应断电,这又是和以上程序块取逻辑”AND”与的过程。
三、 电梯控制技术
所谓电梯控制技术是指电梯的传动系统及操纵系统的电气自动控制。作为我国20世纪70年代电梯的主要标志是交流双速电梯。其调速方法是采用改变电梯牵引电动机的极对数,两种或两种不同级对数的绕组,其中极数少的绕组称为高速绕组,极数多的绕组称为低速绕组。高速绕组用于电梯的起动及稳速运行,低速绕组用于制动及电梯的维修。
20世纪80年代盛行的交流调压调速电梯,其性能优越于交流双速电梯。调压调速方法是改变三相异步电机的定子供电电压实现电动机的调速。由于电梯制动减速性能要求较高,所以采用的制动方法也有所不用。通常多为能耗制动。
在能耗制动中,将电机定子绕组接至直流电源,再加上采用闭环控制方式,从而有效地控制了能耗制动转距,使制动减速过程快速平稳,且制动精度高。
20世纪90年代,调压调频调速电梯开始占领市场。调压调频调速电梯(简称VVVF电梯)的调速方法是调节电机定子绕组供电电压的幅值及频率。在VVVF电梯的传动系统中,大量采用了微机控制技术及脉冲宽度调制技术,脉冲宽度调制器(简称PWM控制器)保证了由逆变器输送至三相异步电机定子电压波形为等效正弦波形。调压调频调速电梯传动系统中还广泛的采用了矢量变换技术。使交流电机转速的控制类似直流电机。VVVF电梯由于其体积小。重量轻,运行效率高,又节约能源,几乎包括了以往所用的电梯的优点,再加上极为完善的调速性能,因此它的应用几乎完全可以和直流电梯相媲美。大家都知道交流电动机具有结构紧凑,维修简单等特点。单双速交流电动机拖动系统采用开环方式控制,线路简单,价格较低,因此目前仍在电梯上广泛应用。但它的缺点是舒适感较差,所以一般被用于载货电梯上。这种系统控制的电梯速度在1米/秒以下。
交流电动机定子调压调速拖动系统国外已大量应用于电梯。这种系统采用可控硅闭环调速,加上能耗或涡流等制动方式,使得它所控制的电梯能在中低速范围内大量取代直流快速和交流双速电梯。它的舒适感好,平层准确度高,而造价却比直流电梯低,结构简单,易于维护,多用于2米/秒以下的电梯。
直流电动机具有调速性能好,调速范围大的特点,因此很早就应用于电梯,采用发电机-电动机组形式驱动。它控制的电梯速度达4米/秒,但是,机组结构体积大,耗电大,维护工作量较大,造价高,因此常用于对对速度,舒适感要求较高的建筑物中。
可控硅直接供电拖动系统在工业上早有应用,但用于电梯上却要解决舒适感问题。(尤其是低速段)应此应用较晚,它几乎与微机同时应用,比起电动机-发电机组形式的直流电梯,它有很多优点。如:机房占地节省35%,重量减轻40%,节能25%到35%。世界上最高速度的10米/秒电梯就是采用这种系统,其调速比达1:1200。
80年代初,VVVF变频变压系统控制的电梯问世。它采用交流电动机驱动,却可以达到直流电动机的水平,目前控制速度已达6米/秒。它的体积小,重量轻,效率高,节省能源等几乎包括了以往电梯的所有优点。是目前最新的电梯拖动系统。
总之,从理论上讲,电梯是垂直运动的运输工具,无需旋转机构来拖动,更新的电梯拖动系统实际上就是直线电机拖动系统。
电梯在垂直运行过程中,有起点站也有终点站。对于三层楼以上的建筑物的电梯,起点站和终点站之间还没有停靠站,起点站设在一楼,终点站设在最高六。设在一楼的起点站称为基站,起点站和终点站称为两端站,两端站之间称为中间站。
各站厅外设有召唤箱,箱上设置有供乘用人员召唤电梯用的召唤按钮或触钮,一般电梯在两端站的召唤箱上各设置一只按钮或触钮。中间层站的召唤箱各设置两只按钮或触钮。对于无司机控制的电梯,在各层站的召唤箱上均设置一只按钮或触钮。而电梯的轿厢内部设置有(杂物电梯除外)操纵箱。操纵箱上设置有手柄开关或与层站对应的按钮或触钮,操纵箱上的按钮或触钮城内指令按钮或触钮。外指令按钮或触钮发出的电信号称为外指令信号,内指令按钮或触钮发出的电信号成为内指令信号。20世纪80年代中期后,触钮已被微动按钮所取代。
作为电梯基站的厅外召唤箱,除设置一只召唤按钮或触钮外,还设置一只钥匙开关,以便下班关电梯时。司机或管理人员把电梯开到基站后,可以通过专用钥匙扭动该钥匙开关。把电梯的厅门关闭妥当后,自动切断电梯控制电源或动力电源。
四、 参考文献
⑴ 陈立定,吴玉香,苏开才编.电气控制与可编程控制器.华南理工大学出版社.200l
⑵ 刘载文,李毫升,钟亚林编.电梯控制技术.北京:北京电子工业出版社.1996
⑶ 西门子公司.SIMATICs7—200可编程序控制器系统手册.2000
⑷ 西门子自动化设备公司. STEP7-Miert/WIN32V3.1sPl编程帮助手册.2000
⑸ 郭宗仁,吴亦锋,郭永等.可编程序控制器及其通信网络技术.北京:人民邮电出版社,1999
⑹ 王平崔,纳新.PLC在电梯控制中的应用.微计算机信息.1999
五、 文章目录
目录
文摘 1
1电梯简介 1
1.1电梯的基本分类 1
1.1.1按用途分类 1
1.1.2 按驱动系统分类 2
1.2 电梯的型号 3
1.3电梯的主要参数及规格尺寸 4
1.4电梯控制技术 5
1.5常用交流调速电梯的特点 7
1.6电梯的工作原理 8
2 PLC可编程序控制器 9
2.1 PLC的起源与发展 9
2.2 PLC控制系统与其他工业控制系统的比较 11
2.2.1 PLC控制系统与继电器控制系统的比较 11
2.2.2 PLC控制系统与计算机系统的比较 12
2.2.3 PLC控制系统与集散型控制系统的比较 13
2.3 PLC控制系统的组成 13
2.3.1 硬件的组成 14
2.3.2 软件的组成 15
2.4 PLC控制系统的发展趋势 18
3 PLC控制电梯的设计 20
3.1电梯运行的理想曲线 20
3.2 电梯控制系统特性 22
3.3 I/O点数及其分配 23
3.4 电梯内部PLC编程 23
3.5电梯到达楼层后的停止 26
3.6 电梯的开,关门程序 26
3.7电梯外部操作与显示PLC程序 27
结束语 28
参考文献 29
致谢 30

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









