







高数下册笔记
关于高等数学下册的一些笔记
向量的方向角和方向余弦
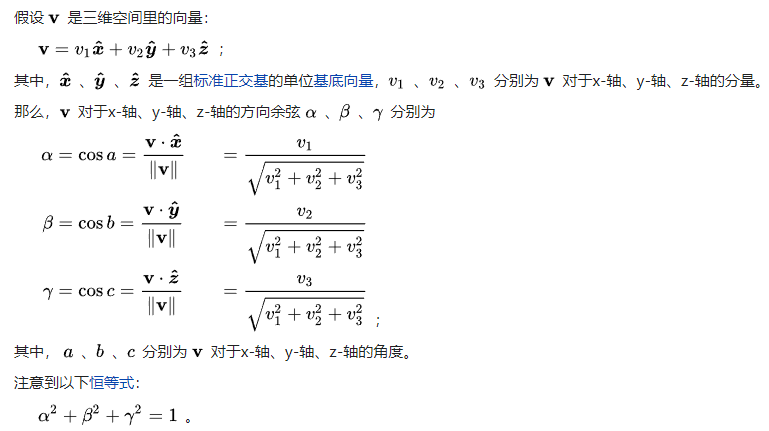
向量叉乘
在三维几何中,向量a和向量b的叉乘结果是一个向量,该向量垂直于a和b向量构成的平面,该向量也被称作法向量
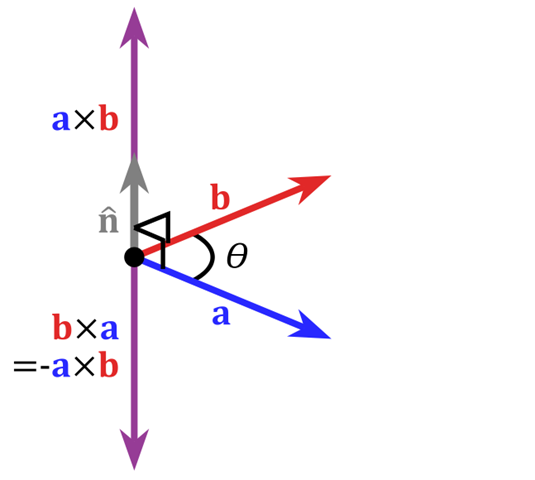
右手螺旋定则,手指指向左元。
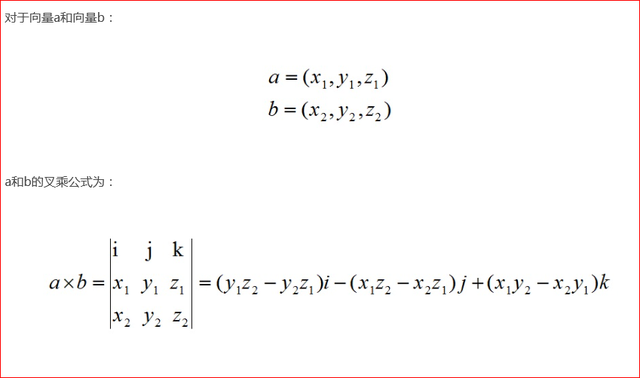
叉乘公式
—行列式的展开
空间平面
空间平面方程
表达式
-
截距式
x / a + y / b + z / c = 1 x/a+y/b+z/c=1 x/a+y/b+z/c=1它与三坐标轴的交点分别为 P ( a , 0 , 0 ) , Q ( 0 , b , 0 ) , R ( 0 , 0 , c ) P(a, 0, 0), Q(0, b, 0), R(0, 0, c) P(a,0,0),Q(0,b,0),R(0,0,c)
-
点法式
A ( x − x 0 ) + B ( y − y 0 ) + C ( z − z 0 ) = 0 A(x-x_0)+B(y-y_0)+C(z-z_0)=0 A(x−x0)+B(y−y0)+C(z−z0)=0法向量为 n ⃗ = ( A , B , C ) \vec n=(A,B,C) n=(A,B,C)
-
一般式
A x + B y + C z + D = 0 Ax+By+Cz+D=0 Ax+By+Cz+D=0基本与点法式相同
可用平面上两条相交的直线的方向向量做点乘从而求出平面法向量
空间直线
空间直线方程
- 两平面联立
- 对称式,由方向向量和直线上一点确定
- 参数式 // 可由对称式导出
详情戳链接
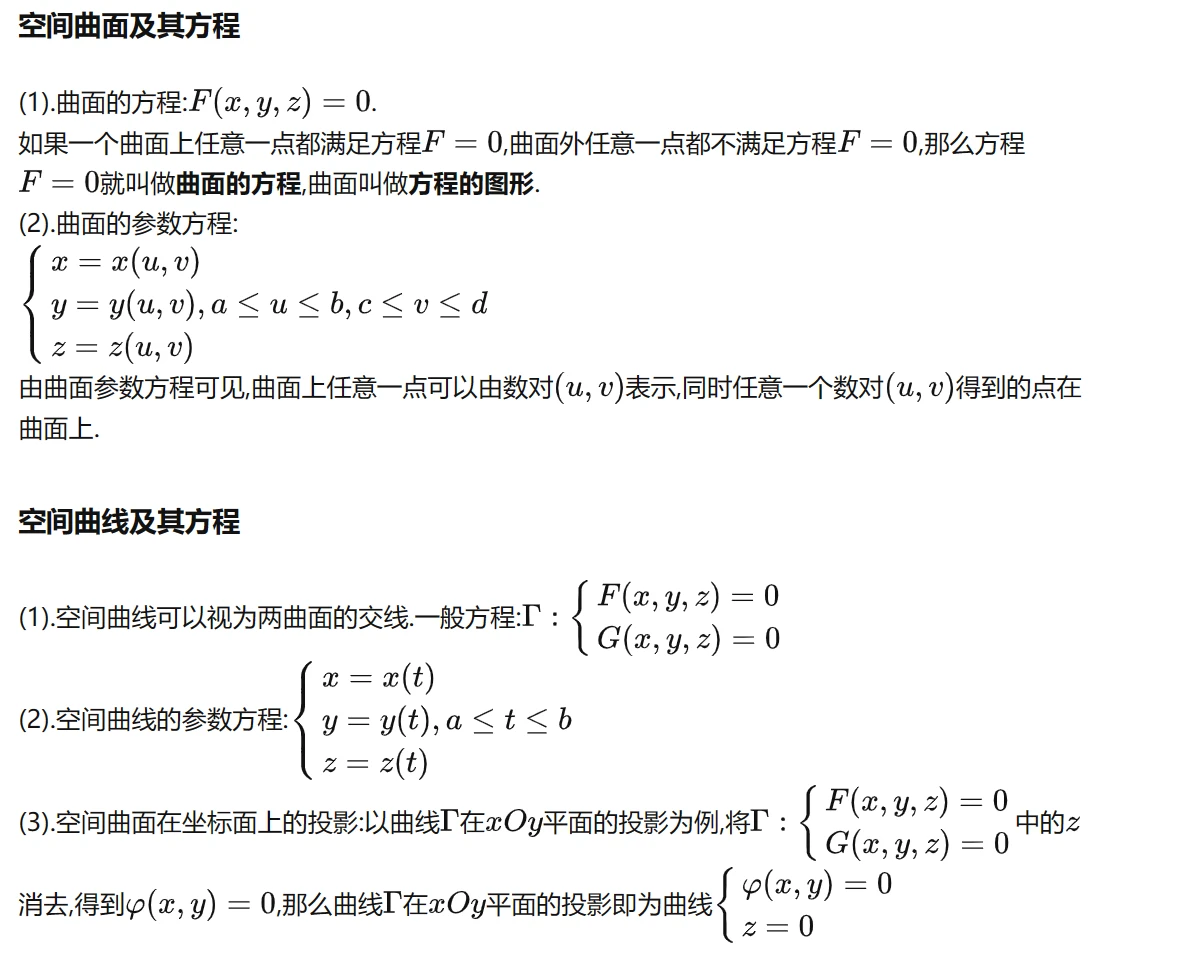
空间曲面与空间曲线
空间曲面及其方程
曲线弧长
设空间曲线C由参数方程
x
=
x
(
t
)
,
y
=
y
(
t
)
,
z
=
z
(
t
)
x=x(t),\,y=y(t),\,z=z(t)
x=x(t),y=y(t),z=z(t)
给出,且函数 x = x ( t ) , y = y ( t ) , z = z ( t ) x=x(t), \, y=y(t), \, z=z(t) x=x(t),y=y(t),z=z(t) 在闭区间 [ α , β ] [\alpha,\,\beta] [α,β] 上连续则弧长s为
s = ∫ α β x ′ 2 ( t ) + y ′ 2 ( t ) + z ′ 2 ( t ) d t s=\int_{\alpha}^{\beta} \sqrt{x'^2(t)+y'^2(t)+z'^2(t)}dt s=∫αβx′2(t)+y′2(t)+z′2(t)dt
曲线切面
设空间曲面的方程为
F
(
x
,
y
,
z
)
=
0
,
F(x,y,z)=0,
F(x,y,z)=0,
而
M
(
x
0
,
y
0
,
z
0
)
M(x_0,y_0,z_0)
M(x0,y0,z0) 是曲面
Σ
\Sigma
Σ 上的一点.
-
法向量:
( F x ′ ( x 0 , y 0 , z 0 ) , F y ′ ( x 0 , y 0 , z 0 ) , F z ′ ( x 0 , y 0 , z 0 ) ) . (F'_x(x_0,y_0,z_0),F'_y(x_0,y_0,z_0),F'_z(x_0,y_0,z_0)). (Fx′(x0,y0,z0),Fy′(x0,y0,z0),Fz′(x0,y0,z0)). -
法线方程:
x − x 0 F x ′ ( x 0 , y 0 , z 0 ) = y − y 0 F y ′ ( x 0 , y 0 , z 0 ) = z − z 0 F z ′ ( x 0 , y 0 , z 0 ) \frac{x-x_0}{F'_x(x_0,y_0,z_0)}=\frac{y-y_0}{F'_y(x_0,y_0,z_0)}=\frac{z-z_0}{F'_z(x_0,y_0,z_0)} Fx′(x0,y0,z0)x−x0=Fy′(x0,y0,z0)y−y0=Fz′(x0,y0,z0)z−z0 -
切平面方程:
F x ′ ( x 0 , y 0 , z 0 ) ( x − x 0 ) + F y ′ ( x 0 , y 0 , z 0 ) ( y − y 0 ) + F z ′ ( x 0 , y 0 , z 0 ) ( z − z 0 ) = 0. F'_x(x_0,y_0,z_0)(x-x_0)+ F'_y(x_0,y_0,z_0)(y-y_0)+ F'_z(x_0,y_0,z_0)(z-z_0)=0. Fx′(x0,y0,z0)(x−x0)+Fy′(x0,y0,z0)(y−y0)+Fz′(x0,y0,z0)(z−z0)=0.
空间曲线的切线
空间曲线可视作两个曲面相交而成。
设曲线 l l l 由面 α , β \alpha\, ,\beta α,β 相交而成,
曲线 l l l 在 M ( x 0 , y 0 , z 0 ) M(x_0,y_0,z_0) M(x0,y0,z0) 处的切线可视作面 α , β \alpha\, ,\beta α,β 在点 M ( x 0 , y 0 , z 0 ) M(x_0,y_0,z_0) M(x0,y0,z0) 处的切平面的交线 (切平面就是过曲面该点切线集)
那么设面 α , β \alpha\, ,\beta α,β 在 M ( x 0 , y 0 , z 0 ) M(x_0,y_0,z_0) M(x0,y0,z0) 的法向量分别为 n 1 , n 2 n_1,\,n_2 n1,n2 ,显然 l = n 1 × n 2 l=n_1 \times n_2 l=n1×n2.
- 面 α \alpha α 的法向量: n 1 = [ ∂ F ∂ x , ∂ F ∂ y , ∂ F ∂ z ] T n_1=[\frac{∂F}{∂x},\frac{∂F}{∂y},\frac{∂F}{∂z}]^{T} n1=[∂x∂F,∂y∂F,∂z∂F]T ,
- 面 β \beta β 的法向量: n 2 = [ ∂ G ∂ x , ∂ G ∂ y , ∂ G ∂ z ] T n_2 = [\frac{\partial{G}}{\partial{x}},\frac{\partial{G}}{\partial{y}},\frac{\partial{G}}{\partial{z}}]^{T} n2=[∂x∂G,∂y∂G,∂z∂G]T 。
- 显然 n 1 × n 2 = [ ∂ ( F , G ) ∂ ( y , z ) , ∂ ( F , G ) ∂ ( z , x ) , ∂ ( F , G ) ∂ ( x , y ) ] T n_1 \times n_2 = [\frac{\partial{(F,G)}}{\partial{(y,z)}},\frac{\partial{(F,G)}}{\partial{(z,x)}},\frac{\partial{(F,G)}}{\partial{(x,y)}}]^{T} n1×n2=[∂(y,z)∂(F,G),∂(z,x)∂(F,G),∂(x,y)∂(F,G)]T.
其中 ∂ ( F , G ) ∂ ( x , y ) = ∣ ∂ F ∂ x ∂ F ∂ y ∂ G ∂ x ∂ G ∂ y ∣ \frac{\partial (F,G)}{\partial(x,y)}= \begin{vmatrix} \frac{\partial F}{\partial x} & \frac{\partial F}{\partial y} \\ \frac{\partial G}{\partial x} & \frac{\partial G}{\partial y} \end{vmatrix} ∂(x,y)∂(F,G)= ∂x∂F∂x∂G∂y∂F∂y∂G .
空间曲面
切平面与法线

注记: 心中始终想着一个特例,球面:
x
2
+
y
2
+
z
2
=
R
2
.
x^2+y^2+z^2=R^2.
x2+y2+z2=R2.
皮球放在地上,地面就是切平面,过切点于地面垂直的线就是法线.
多元函数微分
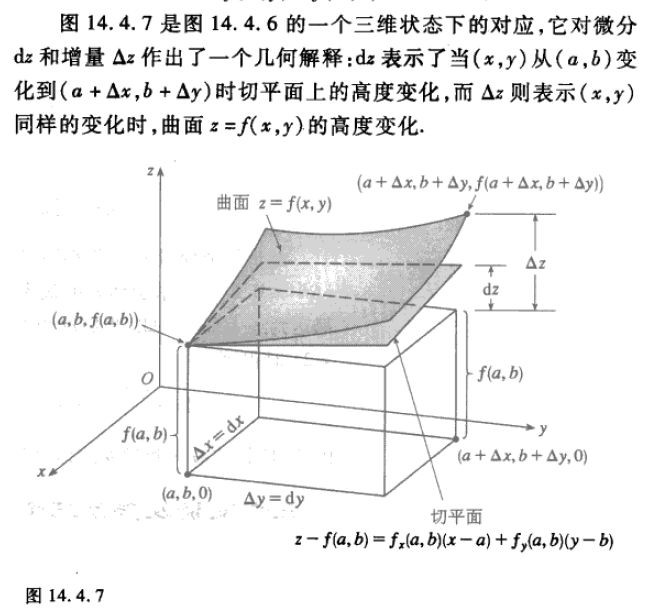
可微的必要条件
若函数 z = f ( x , y ) z=f(x,y) z=f(x,y) 在点 ( x 0 , y 0 ) (x_0,\,y_0) (x0,y0) 处可微,则 z = f ( x , y ) z=f(x,y) z=f(x,y) 在点 ( x 0 , y 0 ) (x_0,\,y_0) (x0,y0) 处存在对变量 x x x 和 y y y 的偏导数,且
d z ∣ ( x 0 , y 0 ) = f x ′ ( x , y ) Δ x + f y ′ ( x , y ) Δ y . dz|_{(x_0,y_0)}=f'_x(x,\,y)\Delta x+f'_y(x,\,y)\Delta y. dz∣(x0,y0)=fx′(x,y)Δx+fy′(x,y)Δy.
函数 z = f ( x , y ) z=f(x,\,y) z=f(x,y) 在点 ( x 0 , y 0 ) (x_0,\,y_0) (x0,y0) 处的全微分可表示为
d z ∣ x 0 , y 0 = f x ′ ( x 0 , y 0 ) d x + f y ′ ( x 0 , y 0 ) d y . dz|_{x_0,\,y_0}=f'_x(x_0,\,y_0)dx+f'_y(x_0,y_0)dy. dz∣x0,y0=fx′(x0,y0)dx+fy′(x0,y0)dy.
可微的充分条件
若函数 z = f ( x , y ) z=f(x,\,y) z=f(x,y) 的两个偏导数在点 ( x 0 , y 0 ) (x_0,\,y_0) (x0,y0) 的某邻域存在,且 f x ′ ( x , y ) f'_x(x,\,y) fx′(x,y) 与 f y ′ ( x , y ) f'_y(x,\,y) fy′(x,y) 在点 ( x 0 , y 0 ) (x_0,\,y_0) (x0,y0) 处连续,则函数 z = f ( x , y ) z=f(x,\,y) z=f(x,y) 在点 ( x 0 , y 0 ) (x_0,\,y_0) (x0,y0) 处可微。
从公式出发
Δ
z
=
f
x
′
(
x
0
,
y
0
)
Δ
x
+
f
y
′
(
x
0
,
y
0
)
Δ
y
+
α
Δ
x
+
β
Δ
y
.
\Delta z=f'_x(x_0,\,y_0)\Delta x + f'_y(x_0,\,y_0)\Delta y +\alpha\Delta x + \beta\Delta y.
Δz=fx′(x0,y0)Δx+fy′(x0,y0)Δy+αΔx+βΔy.
ρ = ( Δ x ) 2 + ( Δ y ) 2 \rho = \sqrt{(\Delta x)^2+(\Delta y)^2} ρ=(Δx)2+(Δy)2
若满足下式则称可微(即余项是 ρ \rho ρ 的高阶无穷小
lim ρ → 0 α Δ x + β Δ y ρ = 0. \lim\limits_{\rho\rightarrow0}\frac{\alpha\Delta x + \beta\Delta y}{\rho} =0. ρ→0limραΔx+βΔy=0.
偏微分(偏导)
若函数
z
=
f
(
u
,
v
)
z=f(u,\,v)
z=f(u,v) 可微,则称其全微分为
d
z
=
∂
z
∂
u
d
u
+
∂
z
∂
v
d
v
dz=\frac{\partial z}{\partial u}du+\frac{\partial z}{\partial v}dv
dz=∂u∂zdu+∂v∂zdv
隐函数微分
-
二元
y ′ = − F x ′ ( x , y ) F y ′ ( x , y ) . y'=-\frac{F'_x(x,y)}{F'_y(x,y)}. y′=−Fy′(x,y)Fx′(x,y). -
三元
设函数 F ( x , y , z ) = 0 F(x,y,z)=0 F(x,y,z)=0
有偏导
-
F x ′ ( x , y , z ) F'_x(x,y,z) Fx′(x,y,z)
-
F y ′ ( x , y , z ) F'_y(x,y,z) Fy′(x,y,z)
-
F z ′ ( x , y , z ) F'_z(x,y,z) Fz′(x,y,z)
则有(注意负号)
z x ′ = f x ′ ( x , y ) = − F x ′ ( x , y , z ) F z ′ ( x , y , z ) z'_x=f'_x(x,y)=-\frac{F'_x(x,y,z)}{F'_z(x,y,z)} zx′=fx′(x,y)=−Fz′(x,y,z)Fx′(x,y,z)
z y ′ = f y ′ ( x , y ) = − F y ′ ( x , y , z ) F z ′ ( x , y , z ) z'_y=f'_y(x,y)=-\frac{F'_y(x,y,z)}{F'_z(x,y,z)} zy′=fy′(x,y)=−Fz′(x,y,z)Fy′(x,y,z)
-
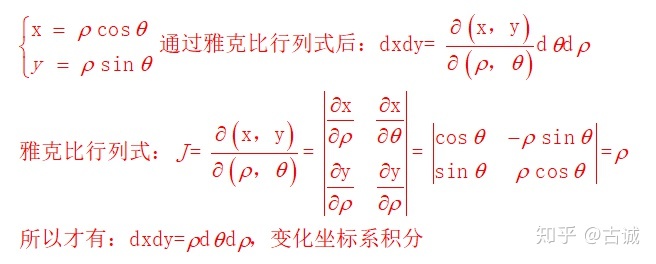
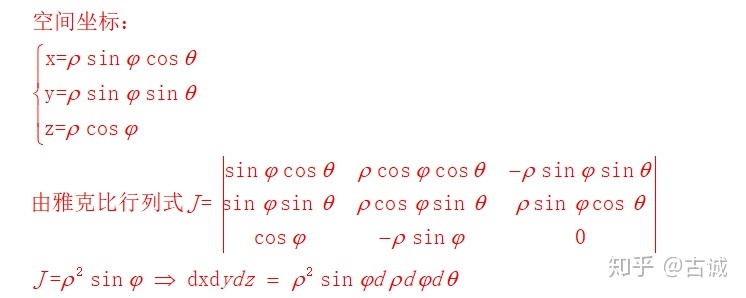
雅可比行列式
多用于坐标系变换,在积分微元改变后要乘上雅可比行列式
多元函数极值
多元函数极值
必要条件: 设函数
f
(
x
,
y
)
f(x,y)
f(x,y) 在点
M
0
(
x
0
,
y
0
)
M_0(x_0,y_0)
M0(x0,y0) 处存在偏导数,且取极值,则
f
x
′
(
x
0
,
y
0
)
=
0
,
f
y
′
(
x
0
,
y
0
)
=
0.
f'_x(x_0,y_0)=0,\,\,f'_y(x_0,y_0)=0.
fx′(x0,y0)=0,fy′(x0,y0)=0.
充分条件:设函数
z
=
f
(
x
,
y
)
z=f(x,y)
z=f(x,y) 在点
M
0
(
x
0
,
y
0
)
M_0(x_0,y_0)
M0(x0,y0) 的某邻域
U
(
M
0
)
U(M_0)
U(M0) 内具有二阶连续偏导数,
M
0
M_0
M0 是
f
(
x
,
y
)
f(x,y)
f(x,y) 的驻点,记
A
=
f
x
x
′
′
(
x
0
,
y
0
)
,
B
=
f
x
y
′
′
(
x
0
,
y
0
)
,
C
=
f
y
y
′
′
(
x
0
,
y
0
)
.
A=f''_{xx}(x_0,y_0),\enspace B=f''_{xy}(x_0,y_0),\enspace C=f''_{yy}(x_0,y_0).
A=fxx′′(x0,y0),B=fxy′′(x0,y0),C=fyy′′(x0,y0).
- 若 B 2 − A C < 0 B^2 - AC < 0 B2−AC<0 ,则 M 0 M_0 M0 是 f ( x , y ) f(x,y) f(x,y) 的极值点. 且当 A < 0 A<0 A<0 时, M 0 M_0 M0 为极大值点;当 A > 0 A>0 A>0 时, M 0 M_0 M0 为极小值点.
- 若
B
2
−
A
C
>
0
B^2 -AC >0
B2−AC>0 , 则
M
0
M_0
M0 不是
f
(
x
,
y
)
f(x,y)
f(x,y) 的极值点.

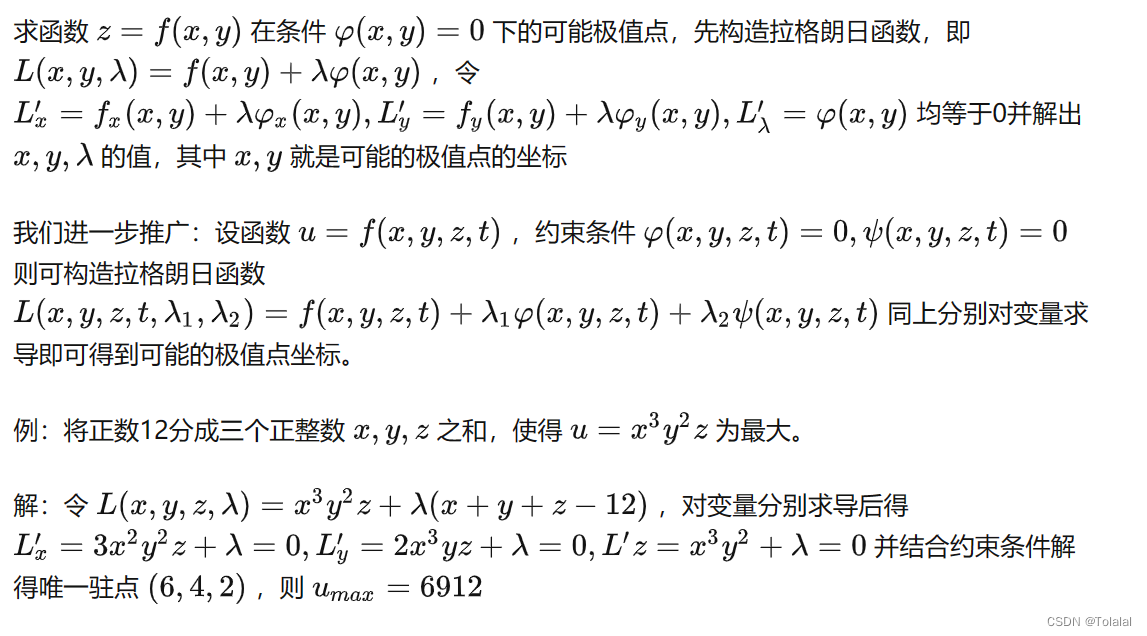
条件极值
拉格朗日乘数法
方向导数和梯度
方向导数
设函数
z
=
f
(
x
,
y
)
z=f(x,y)
z=f(x,y) 在
P
0
(
x
0
,
y
0
)
P_0(x_0,y_0)
P0(x0,y0) 点的某邻域内有定义,
l
\boldsymbol{l}
l 为
x
o
y
xoy
xoy 坐标平面上的一个向量,
P
(
x
,
y
)
P(x,y)
P(x,y) 是由
P
0
P_0
P0 点出发、方向为
l
\boldsymbol{l}
l 的射线上的点,记
ρ
=
(
x
−
x
0
)
2
+
(
y
−
y
0
)
2
\rho = \sqrt{(x-x_0)^2+(y-y_0)^2}
ρ=(x−x0)2+(y−y0)2。 如果极限
lim
ρ
→
0
+
f
(
x
,
y
)
−
f
(
x
0
,
y
0
)
ρ
\lim\limits_{\rho\rightarrow 0^+}{\frac{f(x,y)-f(x_0,y_0)}{\rho}}
ρ→0+limρf(x,y)−f(x0,y0)
存在,则称函数
f
(
x
,
y
)
f(x,y)
f(x,y) 在
P
0
P_0
P0 点沿方向
l
\boldsymbol{l}
l 的方向导数存在,并称此极限为函数
f
(
x
,
y
)
f(x,y)
f(x,y) 在
P
0
P_0
P0 点沿方向
l
\boldsymbol{l}
l 的方向导数,记为
∂
z
∂
l
∣
P
0
或
∂
f
∂
l
∣
P
0
,
\frac{\partial z}{\partial \boldsymbol{l}}\bigg|_{P_0}\quad或 \enspace\frac{\partial f}{\partial \boldsymbol{l}}\bigg|_{P_0},
∂l∂z
P0或∂l∂f
P0,
即
∂
z
∂
l
∣
P
0
=
lim
ρ
→
0
+
f
(
x
,
y
)
−
f
(
x
0
,
y
0
)
ρ
.
\frac{\partial z}{\partial \boldsymbol{l}}\bigg|_{P_0}=\lim\limits_{\rho\rightarrow 0^+}\frac{f(x,y)-f(x_0,y_0)}{\rho}.
∂l∂z
P0=ρ→0+limρf(x,y)−f(x0,y0).
计算
∂
z
∂
l
∣
P
0
=
∂
z
∂
x
∣
P
0
cos
α
+
∂
z
∂
y
∣
P
0
cos
β
,
\frac{\partial z}{\partial \boldsymbol{l}}\bigg|_{P_0}=\frac{\partial z}{\partial x}\bigg|_{P_0}\cos\alpha+\frac{\partial z}{\partial y}\bigg|_{P_0}\cos\beta,
∂l∂z
P0=∂x∂z
P0cosα+∂y∂z
P0cosβ,
其中
cos
α
,
cos
β
\cos\alpha,\cos\beta
cosα,cosβ是
l
\boldsymbol l
l 的方向余弦
若
l
=
(
a
,
b
,
c
)
\boldsymbol l=(a,b,c)
l=(a,b,c)则
l
\boldsymbol l
l 的方向余弦为
cos
α
=
a
∣
l
∣
,
cos
β
=
b
∣
l
∣
,
cos
γ
=
c
∣
l
∣
.
\cos\alpha=\frac{a}{|\boldsymbol l|},\enspace\cos\beta=\frac{b}{|\boldsymbol l|},\enspace\cos\gamma=\frac{c}{|\boldsymbol l|}.
cosα=∣l∣a,cosβ=∣l∣b,cosγ=∣l∣c.
梯度
g r a d u ∣ P 0 = ( ∂ u ∂ x , ∂ u ∂ y , ∂ u ∂ z ) ∣ P 0 . \left.\bold{grad}u\big|_{P_0}=\bigg(\frac{\partial u}{\partial x} ,\frac{\partial u}{\partial y} ,\frac{\partial u}{\partial z} \big)\right|_{P_0}. gradu P0=(∂x∂u,∂y∂u,∂z∂u) P0.

















 8555
8555

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









