






01. 接触计算简介
• 接触是一种很普通的物理现象,它是Workbench用户最频繁使用的非线性特征之一。
• 接触可用来分析众多种类的模型。典型的接触运用包括:
– 动态冲击
– 摩擦
– 金属成型
– 螺栓接合
– 零件装配
– 紧配合
– 受压边界条件
– 密封装置
•上述分析类型和除此之外的众多分析都可以使用Workbench中的接触分析模拟。
• 接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实为有效的计算,理解问题的特性和建立合理的模型是很重要的。
• 接触问题存在两个较大的难点:其一,在你求解问题之前,你不知道接触区域,表面之间是接触或分开是未知的,突然变化的,这随载荷、材料、边界条件和其它因素而定;其二,大多的接触问题需要计算摩擦,有几种摩擦和模型供你挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
02 接触对
• ANSYS Workbench 中的接触单元用来:
– 防止接触面互相穿透(或使用接触协调)
– 转换接触面之间的力(包括摩擦力和法向压力)
– 对接触面的相对位置进行跟踪
• 接触体可以是刚性的也可以是柔性的,考虑下面两类模型:
– 刚体-柔体的接触
• 一表面被认为是理想刚体-除了允许刚体运动外没有任何的应力、应变、和结构变形.
• 当一个接触表面的刚度明显大于其它表面且我们对该面的应力不感兴趣时.
– 柔体-柔体的接触.
• 两接触体都由柔性有限元单元构成.
• 当两个任意形状的面接触时应使用面-面接触单元.
– 事先并不需要知道确切的接触位置.
– 两接触表面可以使用不同的网格.
– 允许较大的相对滑动.
– 支持大应变和大转动.
– 支持材料非线性。
• Workbench接触支持以下自由度:
– 结构: UX, UY, UZ
– 结构/热: UX, UY, UZ, TEMP
– 热: TEMP
– 结构/热/电: UX, UY, UZ, TEMP,VOLT
– 热/电: TEMP ,VOLT
– 结构/电: UX, UY, UZ,VOLT
– 电: VOLT
– 磁: AZ(二维), MAG (三维)
注意:很多自由度的激活在Workbench中需要插入命令流实现
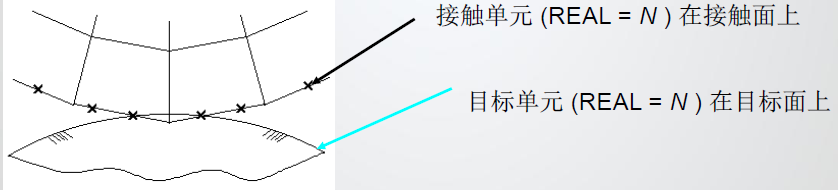
• Workbench接触采用接触对的概念,接触对由目标面和接触面组成。
– 接触单元就像皮肤一样铺设在有限元模型之上.
• 面-面接触单元直接使用接触面上的高斯点
• 点-面接触单元直接使用接触面上的节点(无高斯积分点)
– 接触面和目标面使用不同的单元类型.
– 接触对通过实常数来识别.
03 接触算法
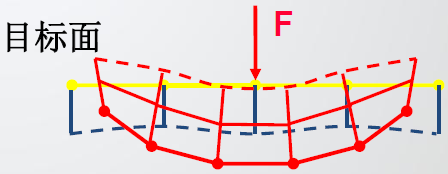
• Workbench如何保持接触面的协调?
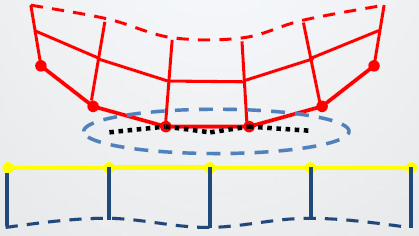
• 现实接触物体并不产生互相穿透。因此,程序必须协调两接触面以避免其有限元模型互相穿透。
– 当程序阻止互相穿透时, 我们称之为强制性接触协调。
– Workbench提供几种不同的算法来实现接触面间的协调。
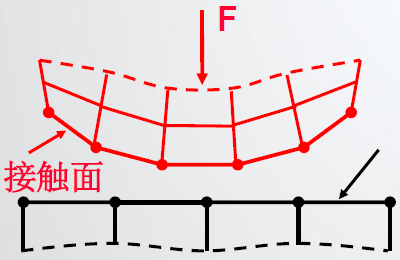
当不使用接触协调时发生穿透
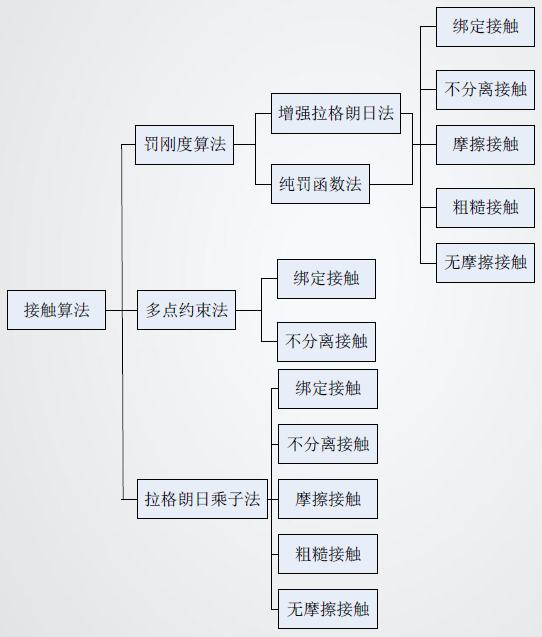
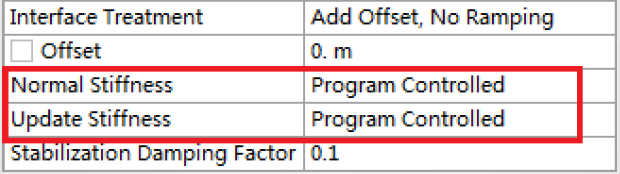
ANSYS Workbench提供的接触算法
(1)增强拉格郎日法(Augmented Lagrange)(法向和切向);
(2)纯罚函数法(Pure Penalty)(法向和切向)
(3)多点约束法(MPC)(法向和切向)
(4)法向使用纯拉格郎日法,切向使用纯罚函数法
(5)纯拉格朗日法(法向和切向)
Workbench的GUI窗口只支持算法(1)-(4)
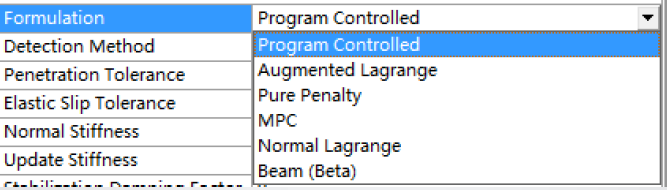
对于算法(5),只能插入命令流:KEYOPT,CID, 2,3,
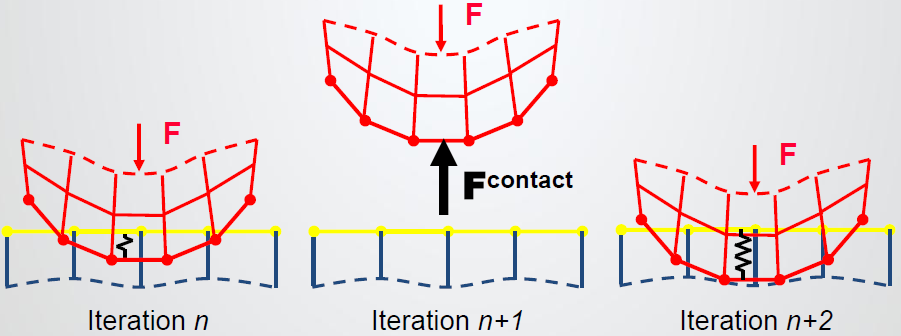
(1)增强Lagrange 法和罚函数法:
- 上述两方法都基于罚函数方程:
- 用一个弹簧施加接触协调条件称为罚函数法,弹簧刚度或接触刚度称为罚参数。
- 该弹簧的变形量△x满足方程:
F = k △x
—接触刚度(k)越大, 接触表面的侵入越少. 然而, 若该值太大, 会导致收敛困难.
当两物体分开时接触刚度是不被激活的
一般情况下,穿透越小结果越准确
罚函数法和增强的Lagrange法的主要区别在于增强型Lagrange法对接
触压力的计算支持的更好
罚函数法:

增强的Lagrange法:

增强的Lagrange 法对刚度K的敏感性较小
正因为其敏感性较小,增强的Lagrange法是ANSYS中采用的缺省算法,然而,在一些分析中,增强的拉格朗日算法可能需要额外的迭代,尤其当变形的网格严重扭曲时。
(2)MPC接触算法
– MPC法(多点约束法)施加约束方程来把接触面与目标面之间的位移“系”在一起
– 特点:
• 不需要接触刚度
• 额外的自由度并没有加入模型
– 通过在迭代中对MPC方程不断的校正,MPC接触算法支持大变形效应
(3)Lagrange乘子法:
– Lagrange乘子法增加额外的自由度(接触压力)来满足接触协调. 因此,接触压力直接作为额外自由度求解出来
• 通过压力自由度保证接触面无穿透或穿透很小
• 不需要法向接触刚度
• 需要使用直接求解器,这会倒置求解较大模型时的计算开销很大
04 常用接触计算控制参数
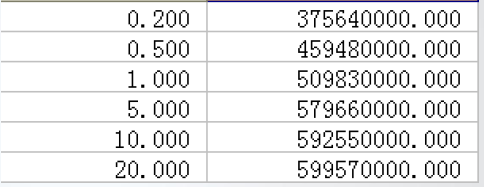
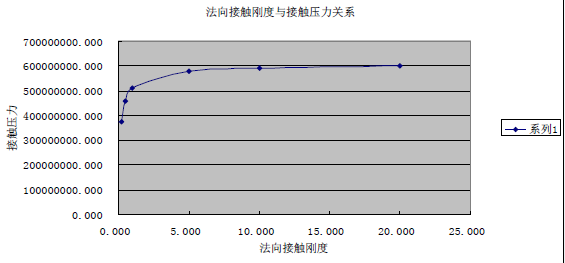
4.1 接触刚度
对增强拉格朗日法和惩罚法,需要法向和切向接触刚度。接触面和目标面之间的渗透量取决于法向刚度。在粘结接触中的滑动量取决于切向刚度。较高的刚度值减少渗透量/滑动量,但会导致总体刚度矩阵的病态和收敛困难。较低的刚度值会导致一定量的渗透/滑动,进而产生不准确的求解。理想地,使用足够高的刚度以便渗入/滑动量是少量可接受的,但是足够低的刚度在收敛方面是很好的。
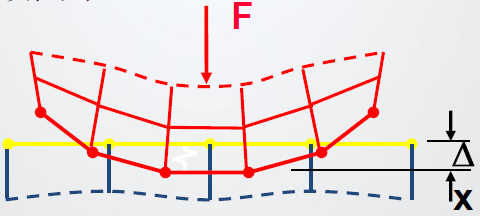
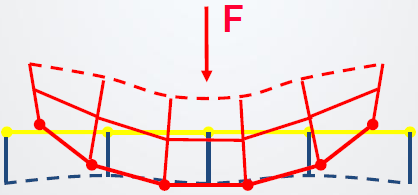
• Workbench使用增强型Lagrange法或罚函数法时都需使用法向接触刚度(FKN),产生一个小的穿透量(xpenetration > 0)从而保证数值上的平衡。
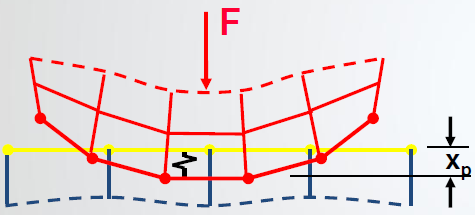
接触“弹簧” 产生一个小的变形xp,平衡方程如下:

这里的kn是法向接触刚度
• 然而实际情况下,两接触体并不互相穿透(xp= 0)
• 作为专业分析人员,您面临以下挑战:
–使穿透最小以保证求解精度
• 因此,接触刚度应该非常大
–然而, 刚度太大却有收敛性困难
• 模型在接触表面可能来回的振动
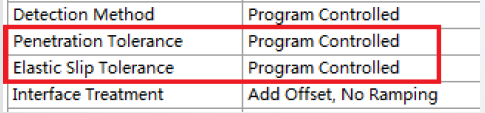
4.2 接触容差
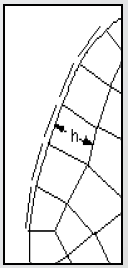
• 穿透容差(FTOLN)控制指定接触对的允许穿透量
• 缺省值为下面单元深度的0.1倍(h)
– 对Shell单元和Beam单元,单元深度为厚度的4倍.
• 对于接触刚度,基于接触对的方法可达到平均容差值.
– 一般情况下,可以改变FKN的值或者FTOLN的值,但不能同时修改两个
– 不要使用太大的容差值,因为它对收敛始终存在不利的影响.
4.3 接触作用模式
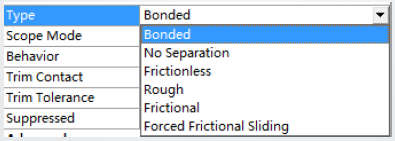
• 对于3类接触类型,又存在几种可供选择的表面行为。这些选项使你可以模拟许多不同的特殊物理效应。
– 绑定接触:目标面和接触面完全粘合在一起,(默认设置)。
– 不分离接触:允许接触面与目标面相对滑动,但是不允许接触面与目标面存在法向移动。
– 无摩擦接触:目标面和接触面从接触状态开始时就“系”在一起(但允许小量的滑移).
– 粗糙接触:支持法向接触的打开和关闭,无滑移(和无穷大的摩擦系数类似).
– 摩擦接触:支持法向接触的打开和关闭,以及切向粘结/滑移摩擦.
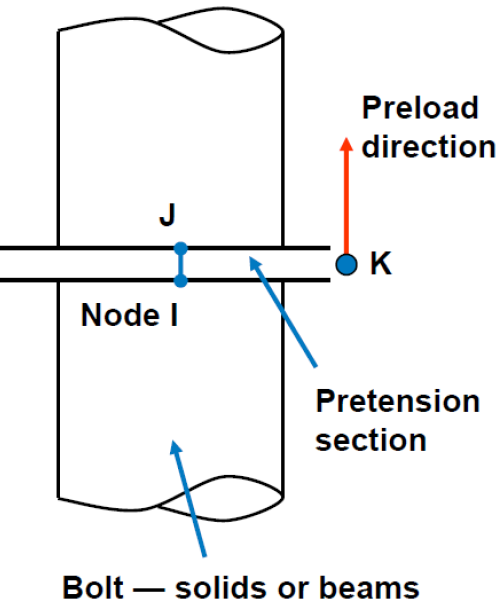
05 螺栓预紧载荷
预紧单元的特性:
- 同一预紧单元集通过“section”进行识别
- 为3D线单元,像钩子一样连接螺栓的两部分
- 节点I,J分别为其两个端点,同常其位置上是重叠的
- 节点K为预紧节点
- 位置可以是任意的
- 只有一个UX自由度
- 用于定义预载荷,可以是FX方向的力或UX方向的位移
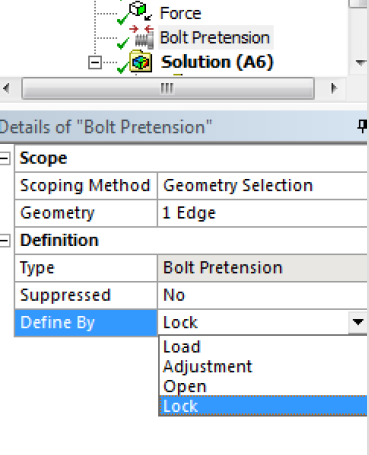
下面是螺栓预拉伸对象Detail窗口中Define by选项可以设置的选项。
Load-施加一个力作为预载荷。显示一个载荷输入口,由用户输入以力单位的形式输入一个力值
Adjustment:施加一个长度作为预调整,例如建立数圈螺纹,显示一个Adjustment输入口,由用户输入以长度单位的形式输入一个位移调整值。
Lock-固定所有位移,可以在除了第一个载荷步以外任何一个载荷步中设置
Open-使用该选项设置螺栓预拉伸载荷为Open,使该载荷在该步不起作用
06 衬垫模型
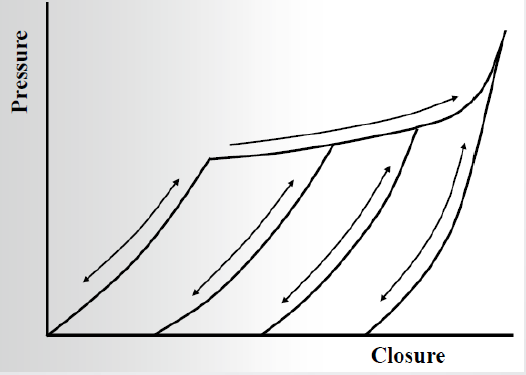
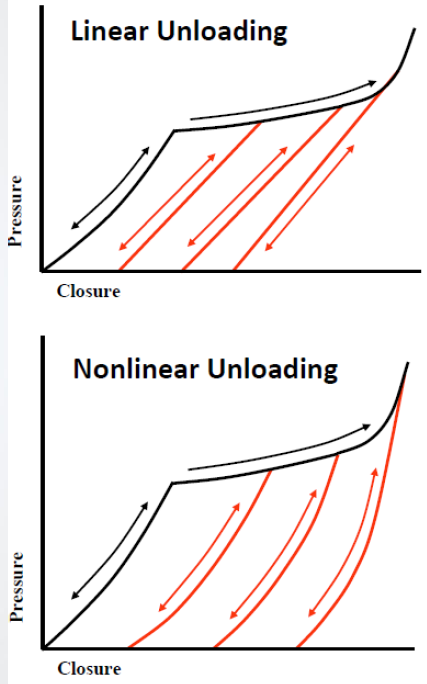
由于垫片一般为多层材料,因此总的响应有很强的非线性
- 完整的垫片行为用压力
- 闭合度关系表述-卸载路径可以不同,由卸载开始的位置点决定
- 材料中可以永存在永久变形
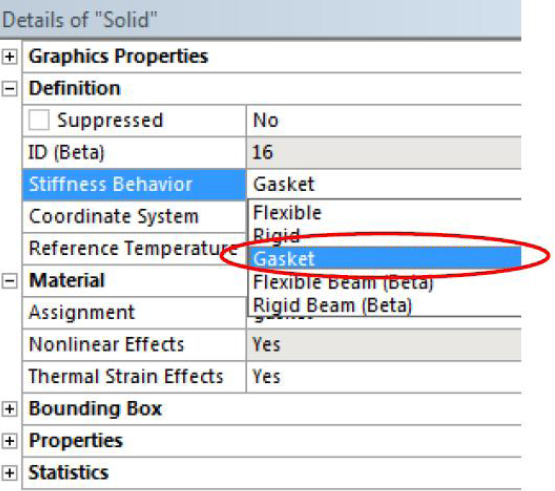
实体部件可以通过设置其刚度行为为“Gasket”将其变为衬垫
- 指定后,衬垫体将用特定的界面单元划分网格
- 该选项只对3D结构分析有效
定义垫片卸载行为有三个选项
- 与加载压力-闭合度路径
- 如果没有定义卸载行为,此为默认选项
- 线性卸载
- 在不同闭合值处定义卸载斜率
- 非线性卸载
- 用户定义压力-闭合曲线
假设:
如果卸载发生在定义的曲线之间,则使用线性插值方法;如果卸载发生在闭合范围以外,则使用最近的闭合度值再加载使用卸载路径
07 螺栓强度评定
根据经验,预紧力F0与预紧力矩T之间的关系为
一般都取
![]()
,d公称直径
在紧固力矩的作用下,螺栓除受预紧力F0的拉伸而产生拉伸应力外,还要受到螺纹摩擦力矩的扭转而产生扭转剪应力,使螺栓处于拉伸和扭转的复合应力状态下
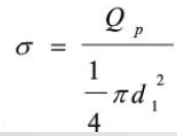
接第四强度理论:

于是在螺栓装配过程中,螺栓所承受的名义拉应力(复合应力)
![]()
式中:A1——螺栓最小剖面面积
d1——螺栓微信剖面的直径
在装配过程中,应该保证
![]()
(材料屈服极限)
根据机械设计理论,拧紧后螺栓的预紧应力不得超过其材料屈服极限σs的80%。


















 91
91

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









