






 本文详细介绍了如何使用MATLAB编程语言读取并解析广播星历文件,提取轨道参数,进行时间修正,并计算卫星在特定坐标系中的位置。作者展示了从文件中逐行读取数据、定义常量、求解轨道参数以及应用摄动纠正的过程。
本文详细介绍了如何使用MATLAB编程语言读取并解析广播星历文件,提取轨道参数,进行时间修正,并计算卫星在特定坐标系中的位置。作者展示了从文件中逐行读取数据、定义常量、求解轨道参数以及应用摄动纠正的过程。
一、代码实现
clear,clc;
fid=fopen('d:/Users/HP/Desktop/cccc/xyz.txt','r');
for i = 1:25
tline = fgetl(fid);
end
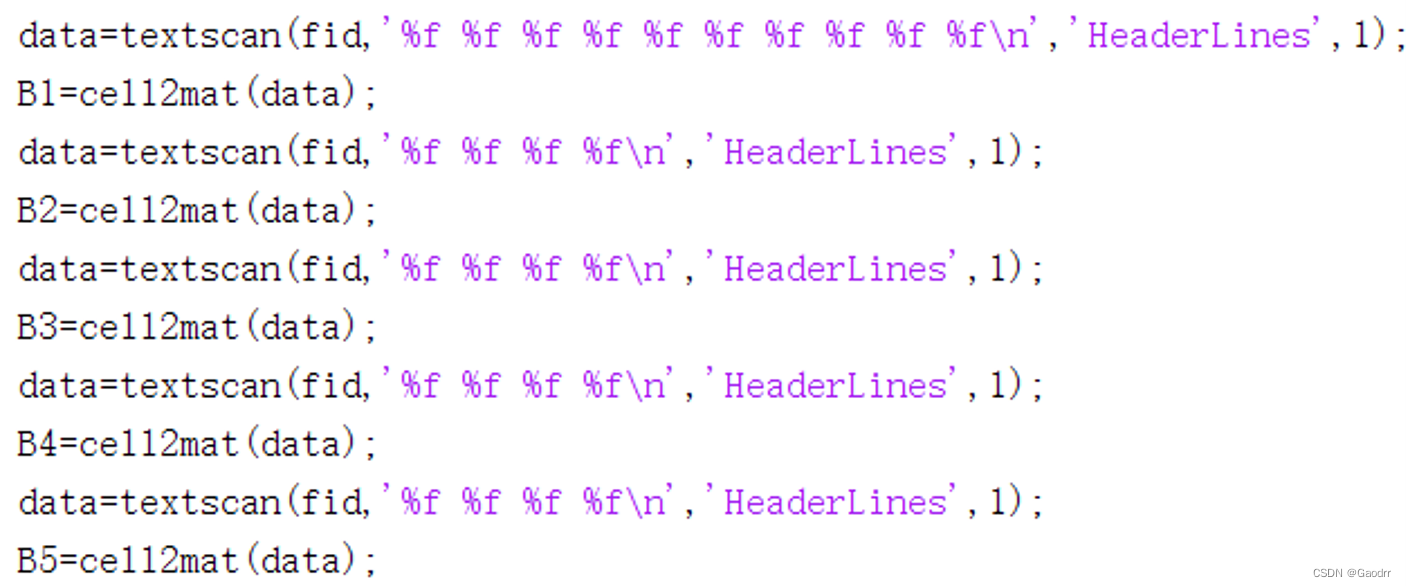
%按行读取星历文件的每一个元素
data=textscan(fid,'%f %f %f %f %f %f %f %f %f %f\n','HeaderLines',1);
B1=cell2mat(data);
data=textscan(fid,'%f %f %f %f\n','HeaderLines',1);
B2=cell2mat(data);
data=textscan(fid,'%f %f %f %f\n','HeaderLines',1);
B3=cell2mat(data);
data=textscan(fid,'%f %f %f %f\n','HeaderLines',1);
B4=cell2mat(data);
data=textscan(fid,'%f %f %f %f\n','HeaderLines',1);
B5=cell2mat(data);
data=textscan(fid,'%f %f %f %f\n','HeaderLines',1);
B6=cell2mat(data);
data=textscan(fid,'%f %f %f %f\n','HeaderLines',1);
B7=cell2mat(data);
data=textscan(fid,'%f\n','HeaderLines',1);
B8=cell2mat(data);
%定义常量GM,Ve
GM=3.986004e14;
We=7.2921151467e-5;
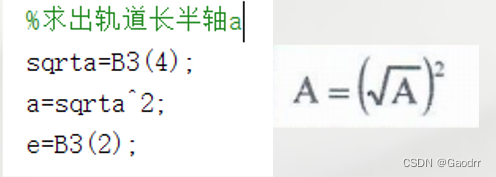
%求出轨道长半轴a
sqrta=B3(4);
a=sqrta^2;
e=B3(2);
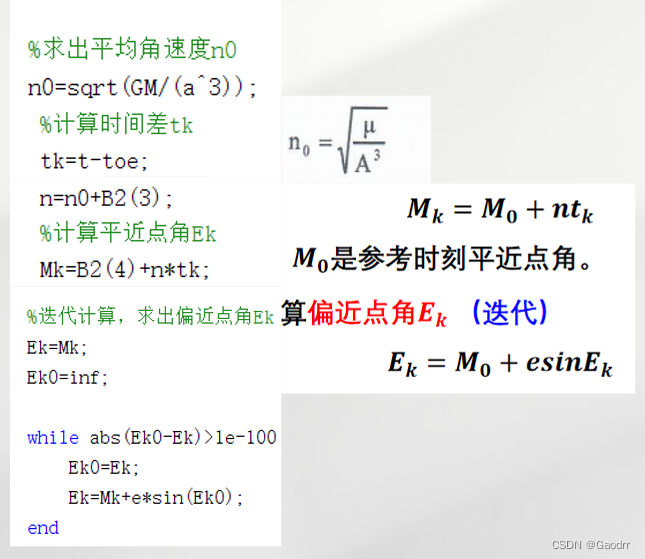
%求出平均角速度n0
n0=sqrt(GM/(a^3));
XYZ=[];
%计算从2004年1月30日16:00开始,每隔1分钟的卫星坐标
%计算从2023年6月1日0:00开始,每隔1分钟的卫星坐标
for i=0:1:20
% 计算当前时刻的儒略日
% JulianDay=fix(365.25*(2023-1))+fix(30.6001*(6+13))+1+(0+i/60+0/3600)/24+1720981.5;
% %JulianDay=fix(365.25*(2023+4716))+fix(30.6001*(6+1))+1+0-1524.5;
% %将儒略日转换成BDS时
% t2=(JulianDay-2444244.5)/7-fix((JulianDay-2444244.5)/7);
% t=t2*604800-14;
%
% %计算卫星钟差改正后的当前时刻的GPS时
% t=t-(B1(8)+B1(9)*(t-B4(1))+B1(10)*(t-B4(1))^2);
%
% %计算参考时刻的儒略日
% JulianDayoe=fix(365.25*(2023-1))+fix(30.6001*(6+13))+1+(0+0/60+0/3600)/24+1720981.5;
%
% %将儒略日转换成GPS时
% t2oe=(JulianDayoe-2444244.5)/7-fix((JulianDayoe-2444244.5)/7);
% toe=t2oe*604800;
%
% %计算时间差tk
% tk=t-toe;
tk=-14.00;
%tk=0;
%计算改正平角速度
n=n0+B2(3);
%计算平近点角Ek
Mk=B2(4)+n*tk;
%迭代计算,求出偏近点角Ek
Ek=Mk;
Ek0=inf;
while abs(Ek0-Ek)>1e-100
Ek0=Ek;
Ek=Mk+e*sin(Ek0);
end
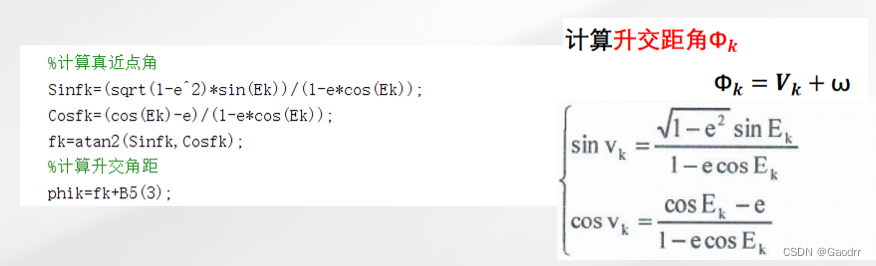
%计算真近点角
Sinfk=(sqrt(1-e^2)*sin(Ek))/(1-e*cos(Ek));
Cosfk=(cos(Ek)-e)/(1-e*cos(Ek));
fk=atan2(Sinfk,Cosfk);
%计算升交角距
phik=fk+B5(3);
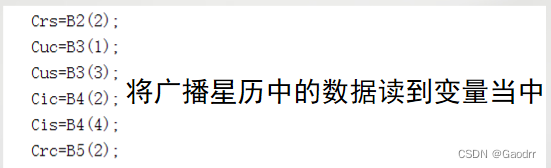
%从卫星星历文件中读取各个方向的振幅Crs,Cuc,Cus,Cic,Cis,Crc
Crs=B2(2);
Cuc=B3(1);
Cus=B3(3);
Cic=B4(2);
Cis=B4(4);
Crc=B5(2);
%计算卫星轨道摄动项改正数
deltauk=Cus*sin(2*phik)+Cuc*cos(2*phik);
deltark=Crs*sin(2*phik)+Crc*cos(2*phik);
deltaik=Cis*sin(2*phik)+Cic*cos(2*phik);
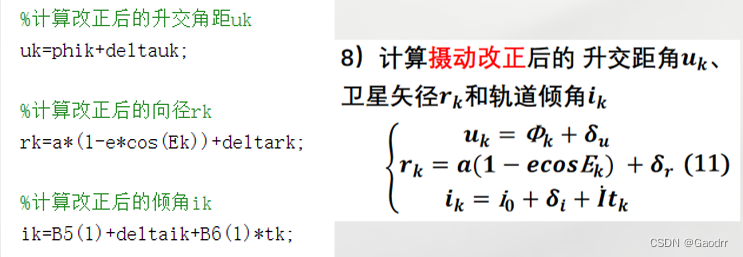
%计算改正后的升交角距uk
uk=phik+deltauk;
%计算改正后的向径rk
rk=a*(1-e*cos(Ek))+deltark;
%计算改正后的倾角ik
ik=B5(1)+deltaik+B6(1)*tk;
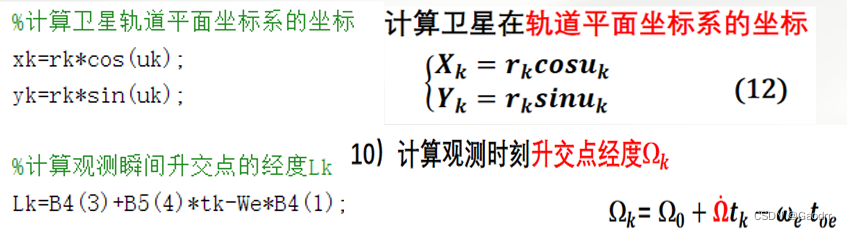
%计算卫星轨道平面坐标系的坐标
xk=rk*cos(uk);
yk=rk*sin(uk);
%计算观测瞬间升交点的经度Lk
Lk=B4(3)+B5(4)*tk-We*B4(1);
%计算卫星在轨道平面内的坐标x,y,z
xyz=[rk*cos(uk);rk*sin(uk);0];
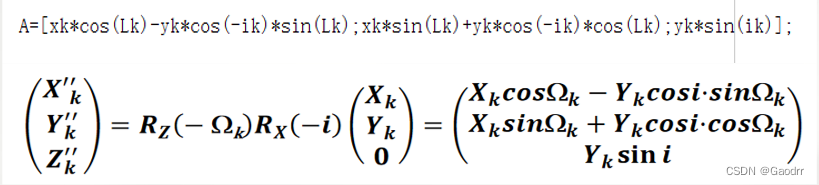
A=[xk*cos(Lk)-yk*cos(-ik)*sin(Lk);xk*sin(Lk)+yk*cos(-ik)*cos(Lk);yk*sin(ik)];
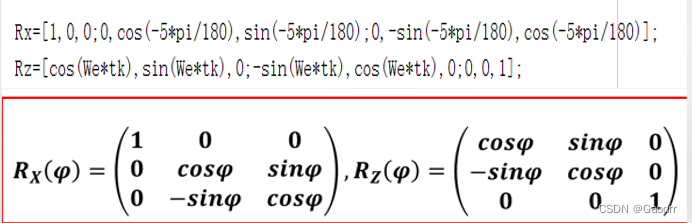
Rx=[1,0,0;0,cos(-5*pi/180),sin(-5*pi/180);0,-sin(-5*pi/180),cos(-5*pi/180)];
Rz=[cos(We*tk),sin(We*tk),0;-sin(We*tk),cos(We*tk),0;0,0,1];
XYZ=vpa([Rz*Rx*A],20);
end
XYZ
二,广播星历文件格式展示
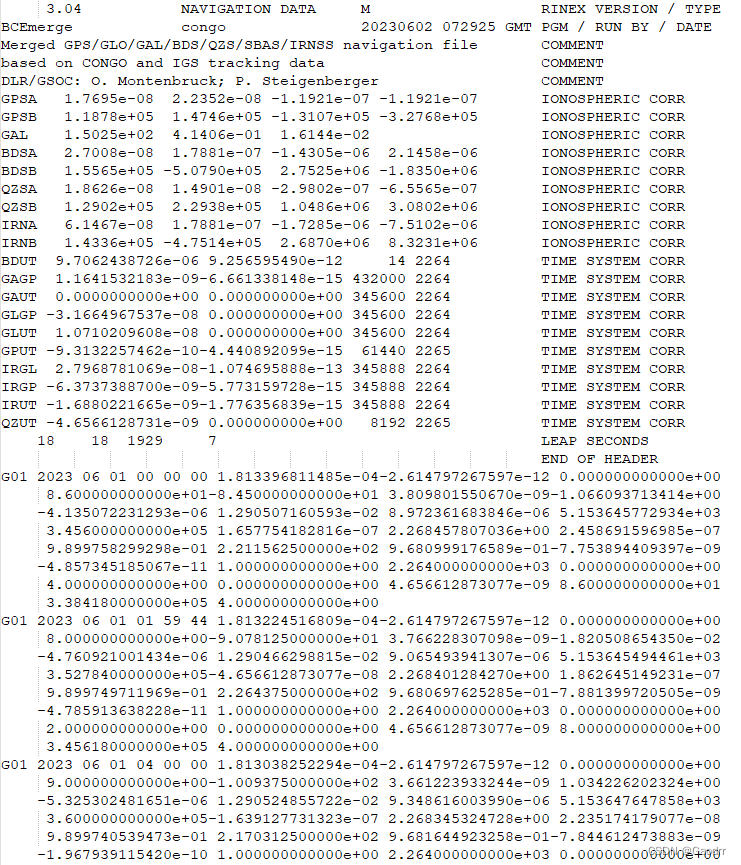
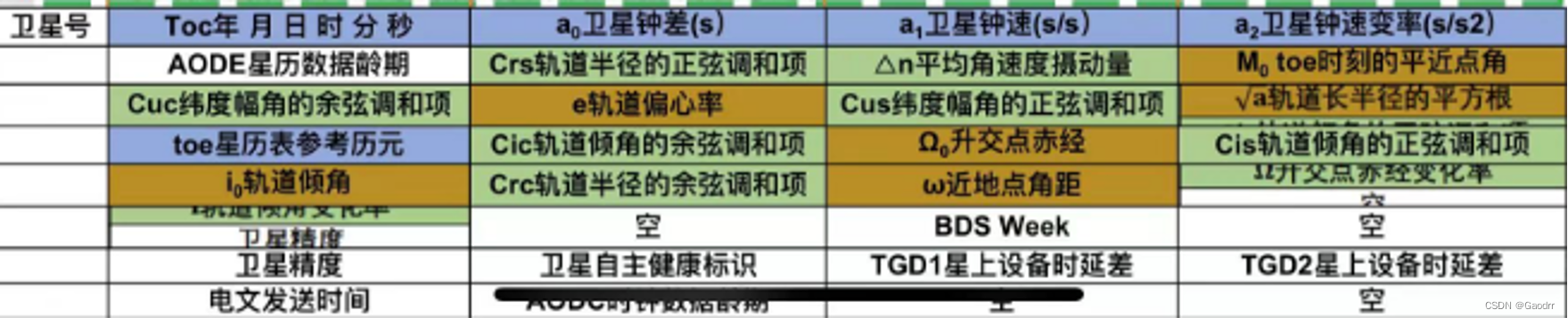
三、广播星历文件解读
四、代码详解
- 打开文件

- 跳过广播星历中不需要的数据
- 读文件




- 从第26行开始按行读取数据,并把他们存储在B#里
 这样转换的原因:
这样转换的原因:
1.存储方式不同:单元格数组一般存储混合数据类型的表格或其他非均匀数据集,而数值数组以规则的网格形式存储数据,所有元素都按照相同的规则排列,转换有利于下标来索引。
2.运算上区别:单元格数组不能直接进行数学运算,数值数组支持各种数学运算,例如加法、乘法、矩阵运算等。
- 定义常量

- 求出轨道长半轴
- 求出平均角速度,时间差,改正平均角速度,平近点角
- 计算升交距角Phik和真近点角fk
- 将广播星历中的数据读取到变量中
- 计算摄动改正量

- 计算摄动改正后的 升交距角uk、卫星矢径rk和轨道倾角ik
- 计算卫星在轨道平面坐标系的坐标xk和yk,升交点经度Lk
- 计算GEO卫星在自定义惯性系中的坐标
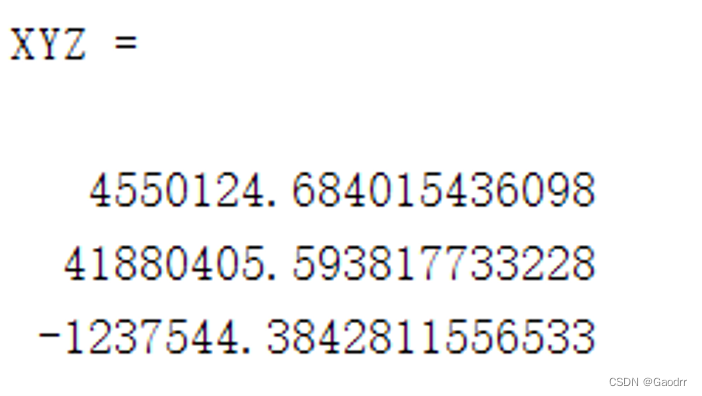
- 计算GEO卫星在CGCS2000中的坐标

使用vpa函数来设置有效数字的位数

- 结果

















 6386
6386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









