






三相无刷电调原理与应用
三相无刷电机(Brushless DC Motor, BLDC)因其高效率、长寿命和低维护需求,在无人机、电动车、工业自动化等领域得到广泛应用。而三相无刷电调(Electronic Speed Controller, ESC)作为无刷电机的核心控制部件,负责精确调节电机的转速和扭矩。本文将深入探讨三相无刷电调的工作原理、关键技术及应用场景。
三相无刷电机工作流程
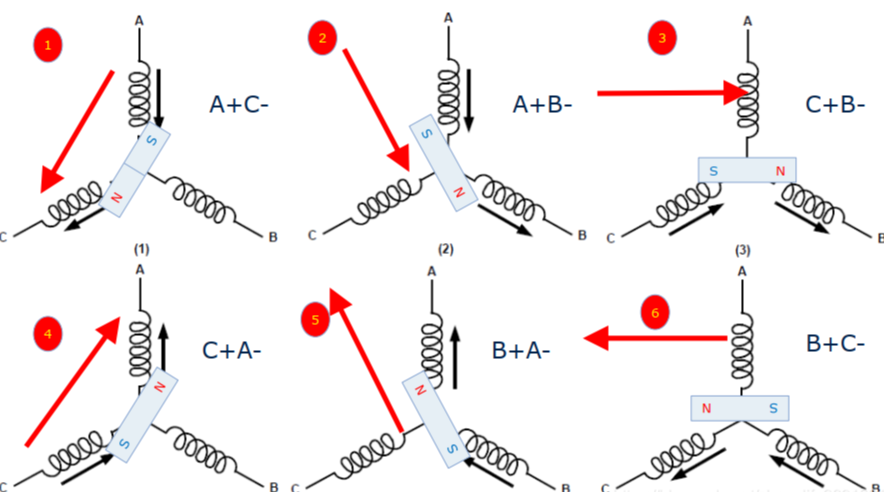
通常驱动方式为6步换相法:
abc三线可以随便命名。
在三相无刷电机驱动中,分为有感与无感驱动
有感:通过传感器组合判断转子当前位置
优点:能够检测到转子位置,启动平稳。支持0速启动
缺点:成本高,体积大,8根线,安装麻烦,传感器在恶劣环境工作干扰大。
无感:无感控制是指在无刷电机(BLDC)运行时,不依赖霍尔传感器等物理传感器来检测转子位置,而是通过检测电机绕组的反电动势(Back-EMF)或其他电气信号来推算转子位置,从而实现换相和转速控制。
优点:成本低,体积小,主需要3根线。寿命和可靠性高。
缺点:启动不流畅,低速或禁止反电动势不好检测到
这里先认识有感驱动再认识有感驱动
无刷电机通过依次切换 A、B、C 三相的通电顺序,产生旋转磁场,驱动转子转动。每步切换 60°电角度,6步完成一个完整周期(360°)。3个霍尔传感器(H1, H2, H3)检测转子位置,决定何时换相
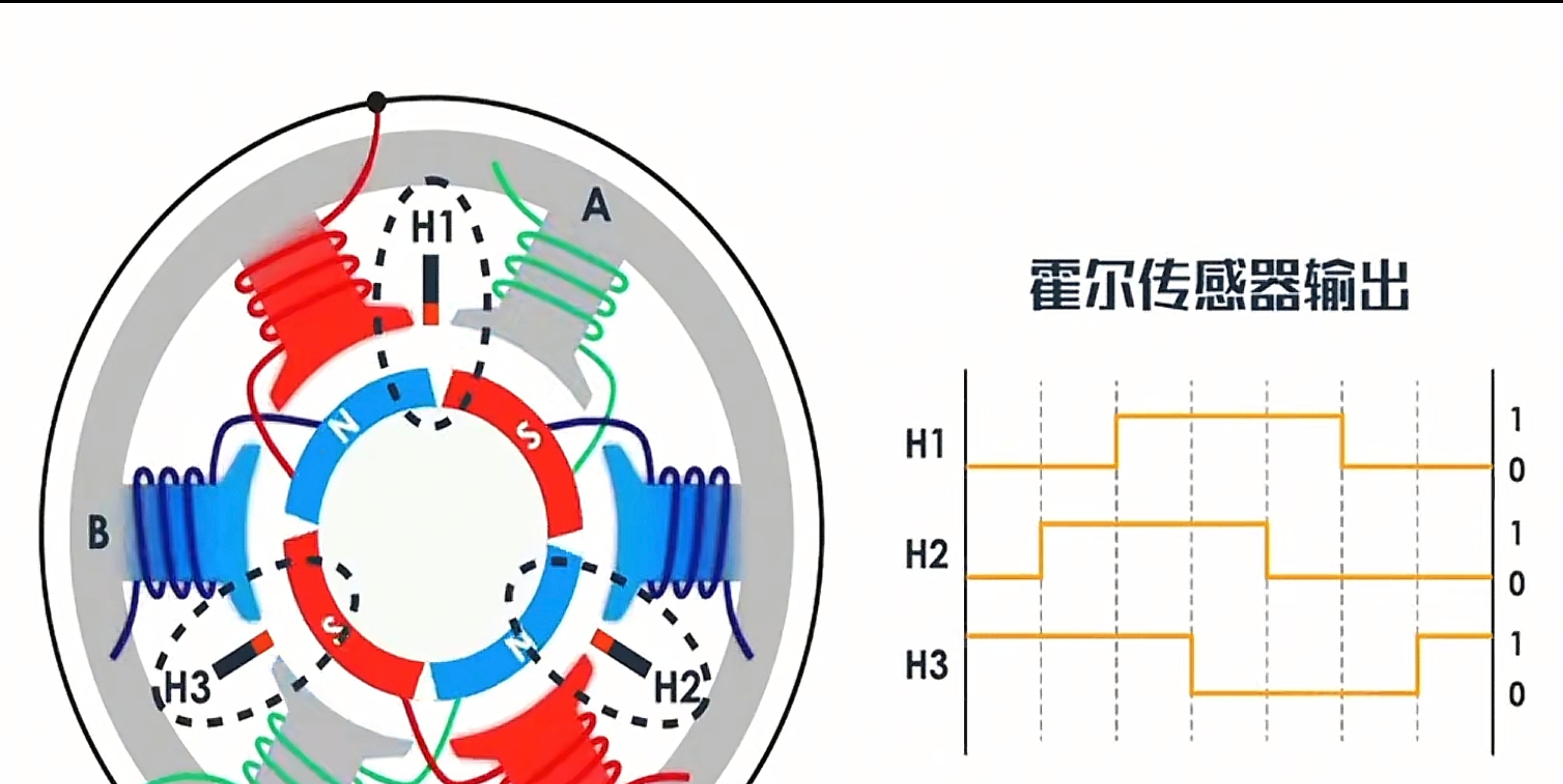
那么六步换相为(下图霍尔信号为H3 H2 H1)
那么有感是这样工作的,无感是如何得到转子位置的呢?
要知道如何无感是如何工作的,首先要知道楞次定理,由于变化的磁场会产生感生电动势,所以在没有通电的那一相上会产生电动势。然后需要了解一个概念,过零点。
过零点:反电动势从正变化为负或从负变化为正。反电动势过零点都发生在不通电的那一相
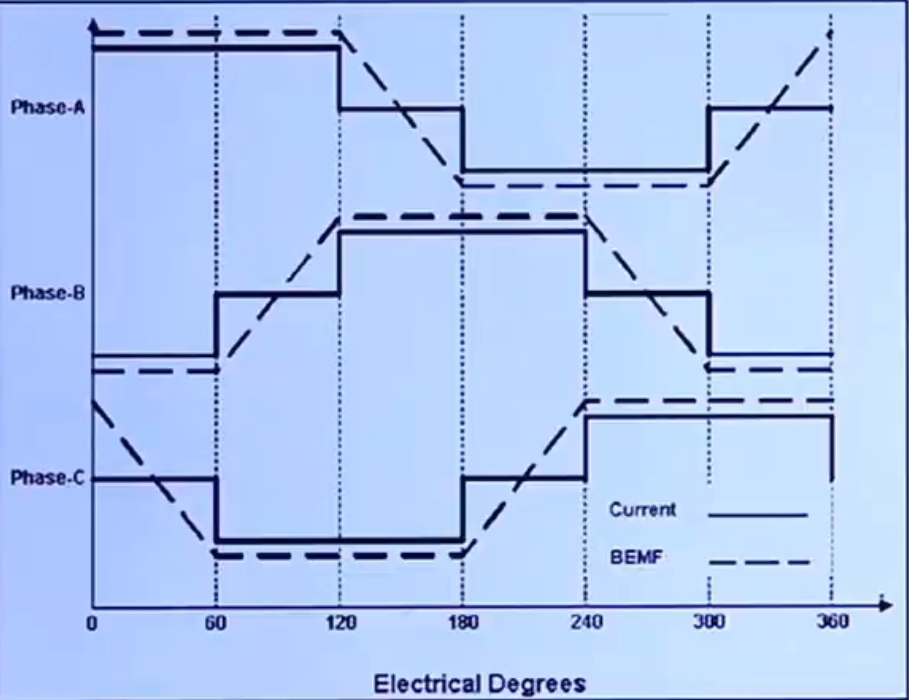
上图中,实线代表电流虚线代表反电动势。
从第一个60°可知a+b-,c为开路,过零点就出现在c相。
我们如何通过反向电动势来判断过零点呢呢?来下图:
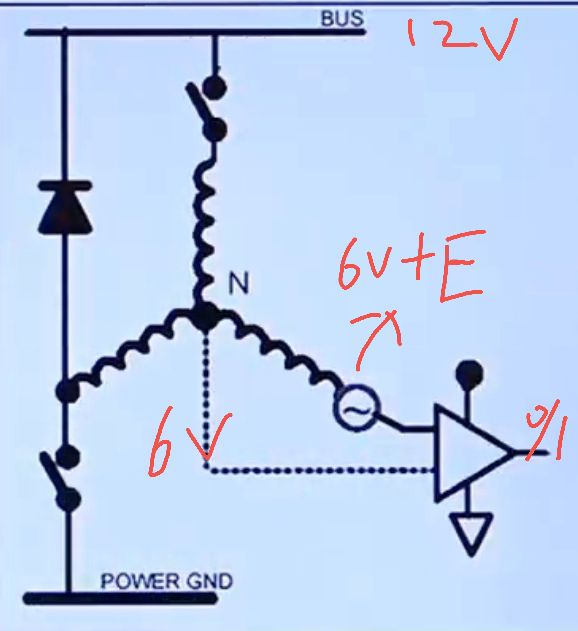
当电源为12v,中性点理想状态下为6v,那么另外一项为6v+E,E为反向电动势。通过判断与中性点的大小知道是否到过零点没。
在现实的三相无刷只有三根线,那么怎么得到中性点呢,我们通常将ABC三相通过电阻,然后接在一起,那么那个点就是中性点。如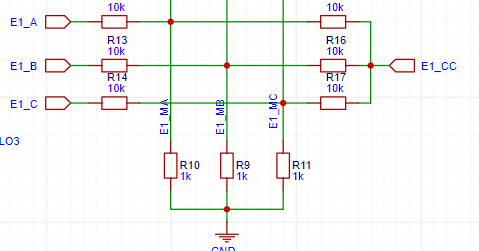
E1_CC就是中性点。然后通过得到过零点及时换相,即可驱动电机。通过零点信号组合确定转子位置,过零点发生在换相前30°,当检测到过零点时要延迟30°后换相。
最后,在电路设计上,要注意分压检测,将输入信号与输出信号隔离,增强信号的驱动能力。注意滤波。
希望这篇文章对你有所帮助。
这里还有一篇很不错的文章推荐给大家:

















 6244
6244

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









