







总的来说,在openEuler上安装Hadoop集群并不困难,只是步骤比较繁琐,所以特意写了一篇博客进行整理,全文从0开始,一步步操作,步骤非常详细,跟着做应该就能复现。可能也存在有部分疏漏,欢迎指正
1.下载ISO映像文件
进入openEuler官网进行下载,下载Offline Standard ISO版本即可
(https://www.openeuler.org/zh/download/?version=openEuler%2024.03%20LTS)
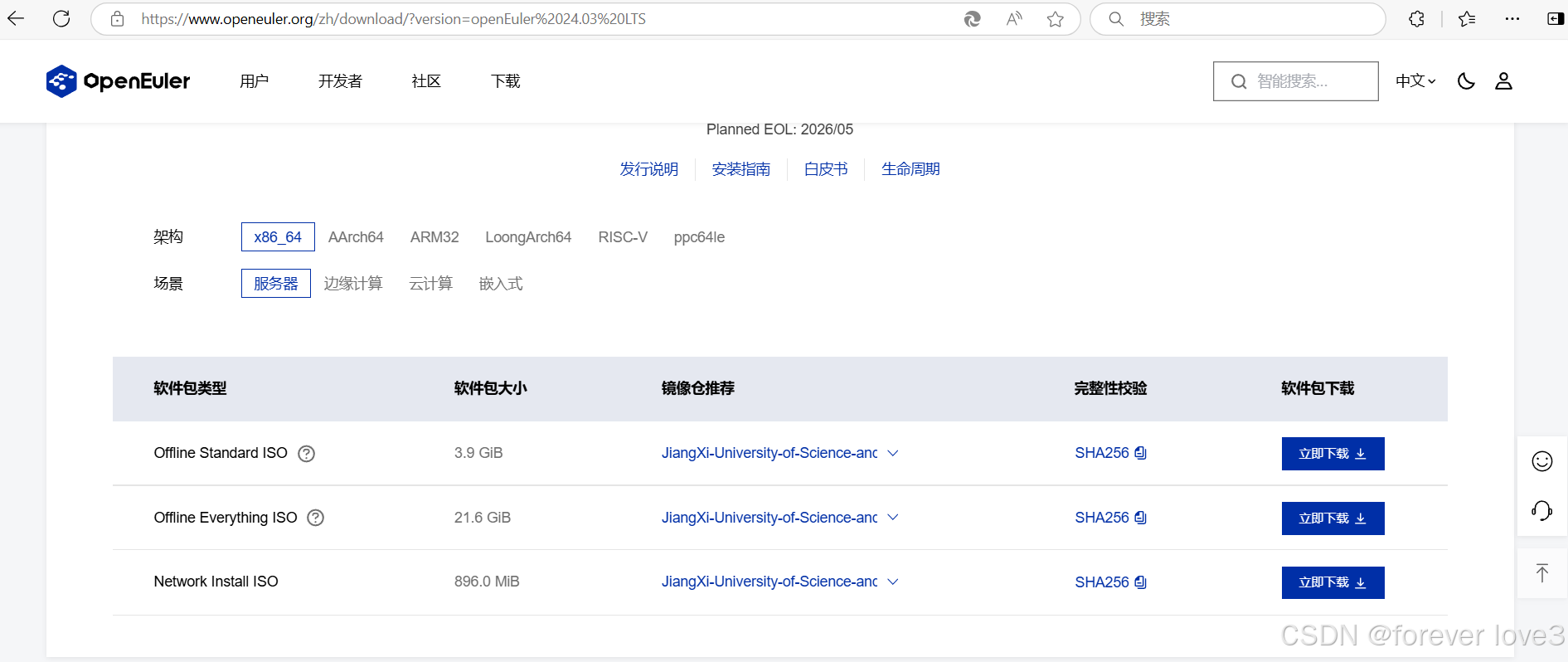
下载完得到的文件应该如下所示

2.使用VmWare设置虚拟机
打开VMware Workstation,点击创建新的虚拟机
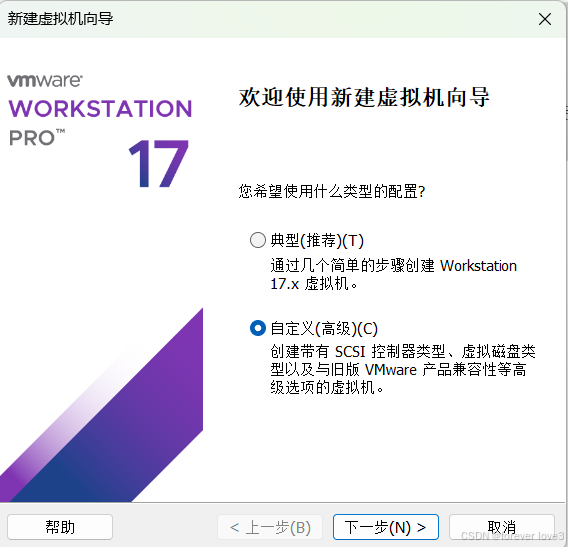
接着选择自定义后,点击下一步
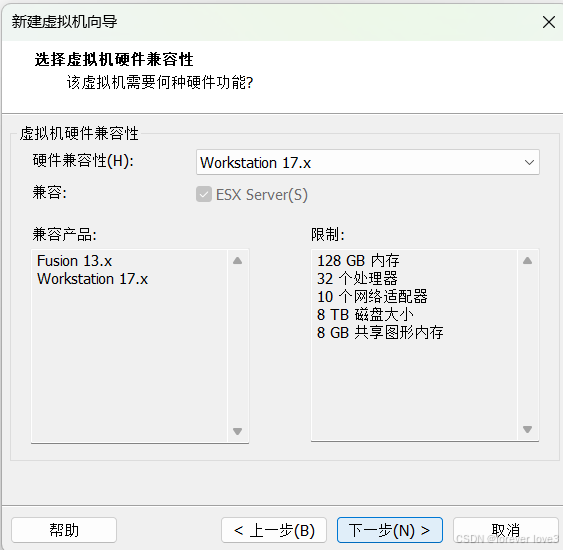
这一步默认选项即可,继续点击下一步
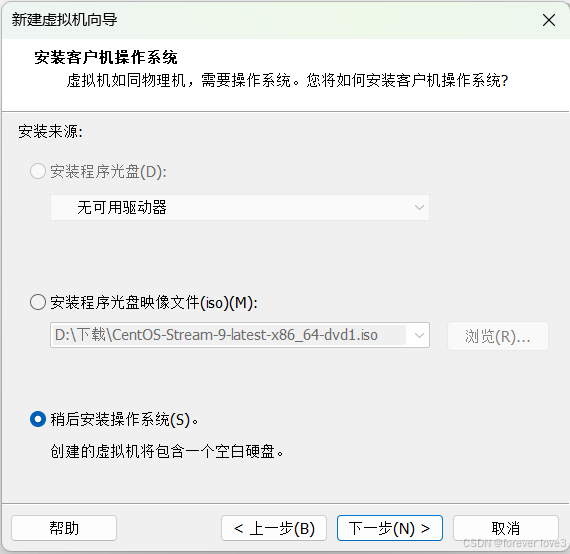
这一步选择稍后安装操作系统。
这一步客户机操作系统选择Linux,下面这个版本根据所安装的操作系统内核版本来进行选择
因为openEuler 24.03 LTS是基于6.6内核的长周期版本,所以我下面的版本选择:“其他Linux 5.x 内核64位”

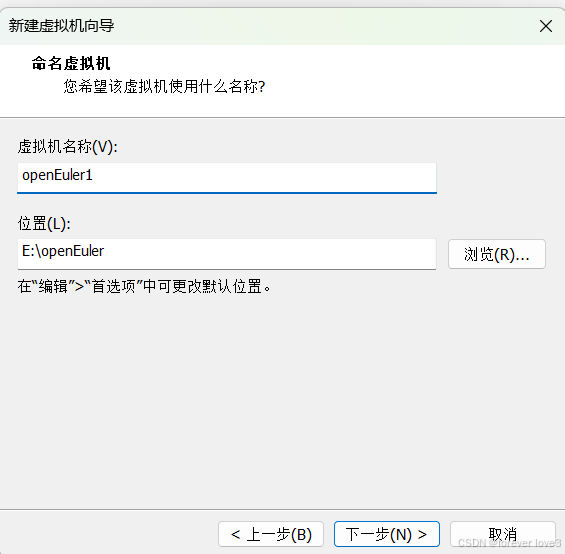
这一步是给虚拟机命名和更改虚拟机存放的位置
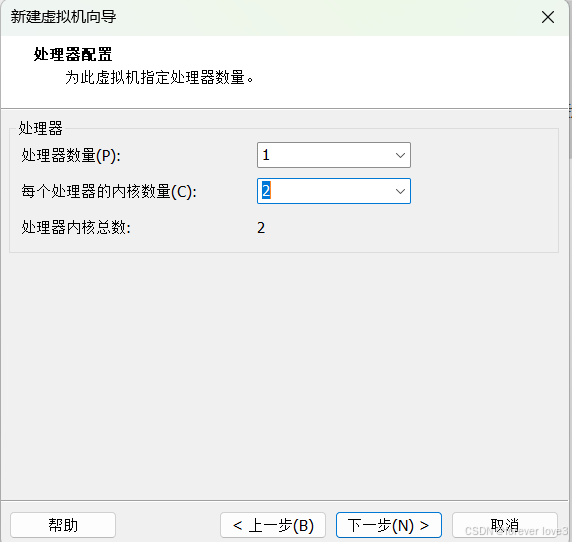
下一步是给虚拟机指定处理器数量,这里,我们将处理机数量设为1,每个处理器的内核数量设为2
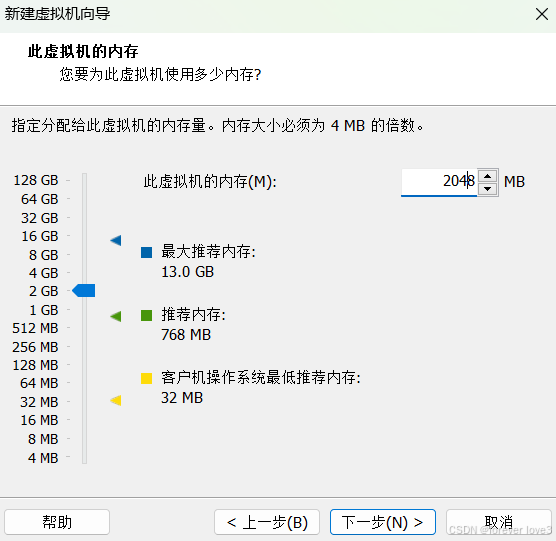
这一步是给虚拟机分配内存,这里我们分配2GB即可
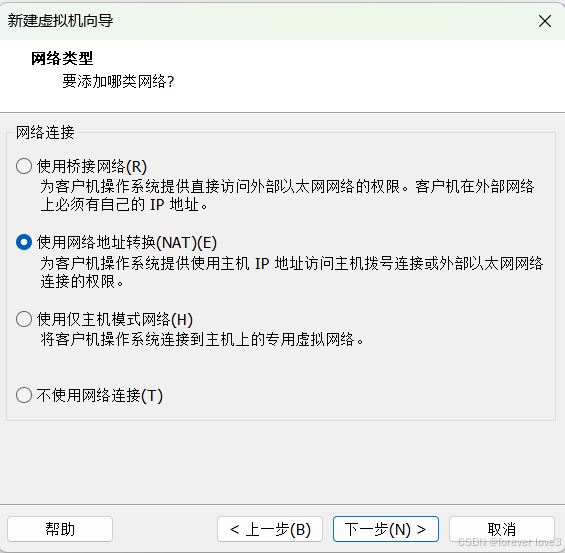
这一步是给虚拟机添加网络类型,我选择的是使用网络地址转换(NAT)
如果安装之后不需要使用互联网络,也可以直接选择仅使用主机网络模式
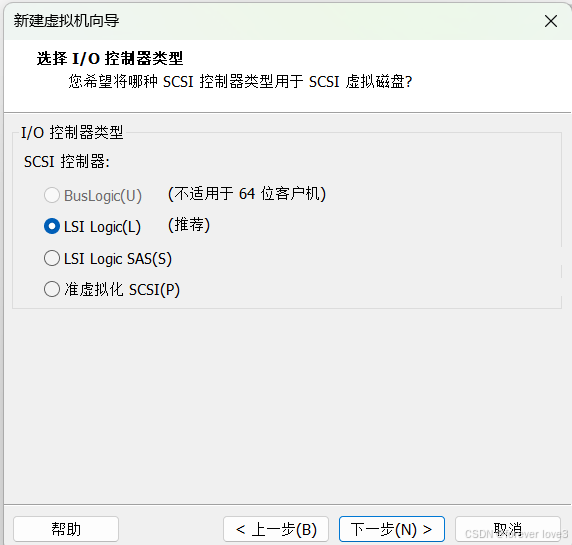
这一步是选择I/O控制器类型,选择默认推荐的LSI Logic即可点击下一步
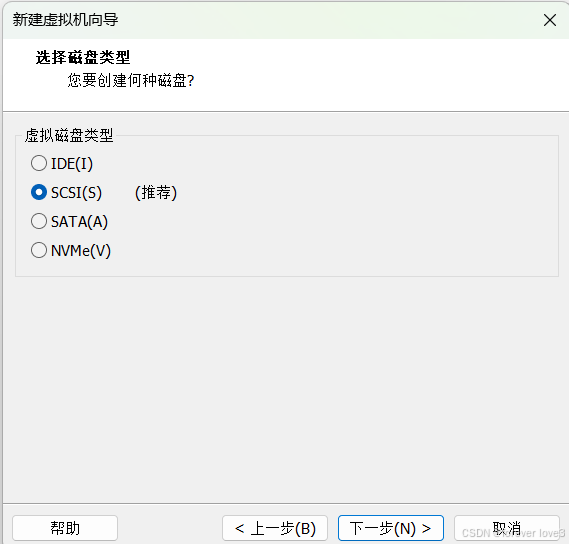
这一步是选择磁盘类型,同样的,选择默认推荐的SCSI即可
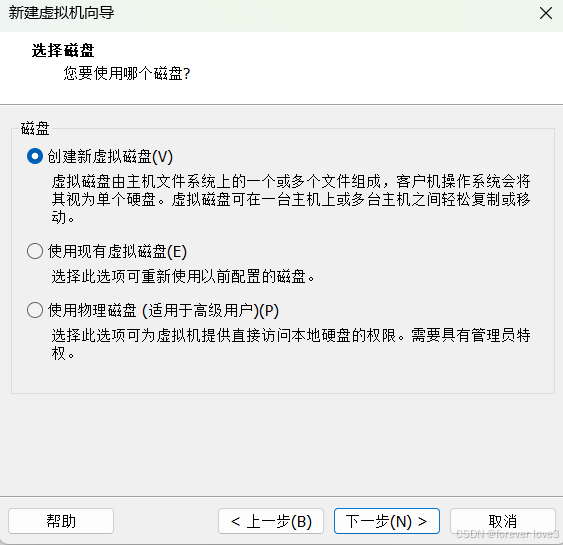
接着这一步,选择创建新虚拟磁盘
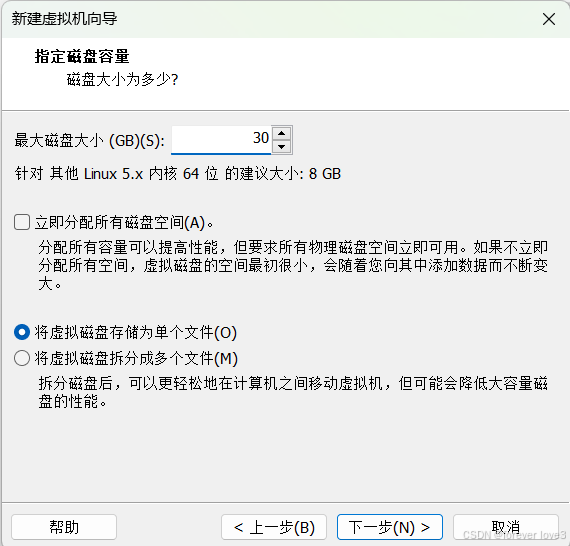
这一步最大磁盘大小设为30GB,下面那个选择存储为单个,存储为多个都可以,存储单个可以最大程度的保留磁盘的性能,存储为多个,可以便于复制和移动
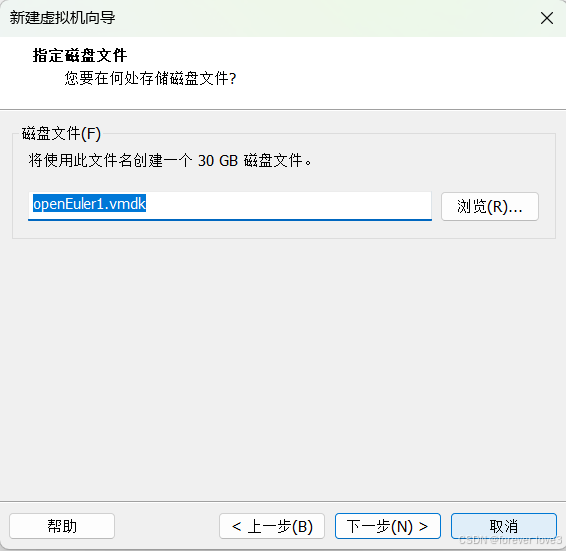
选择在何处存储磁盘文件
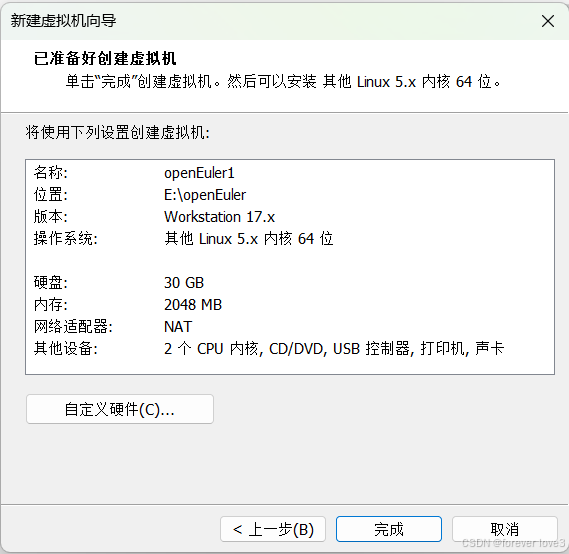
点击完成,完成虚拟机创建
3.在虚拟机中选择镜像,开机
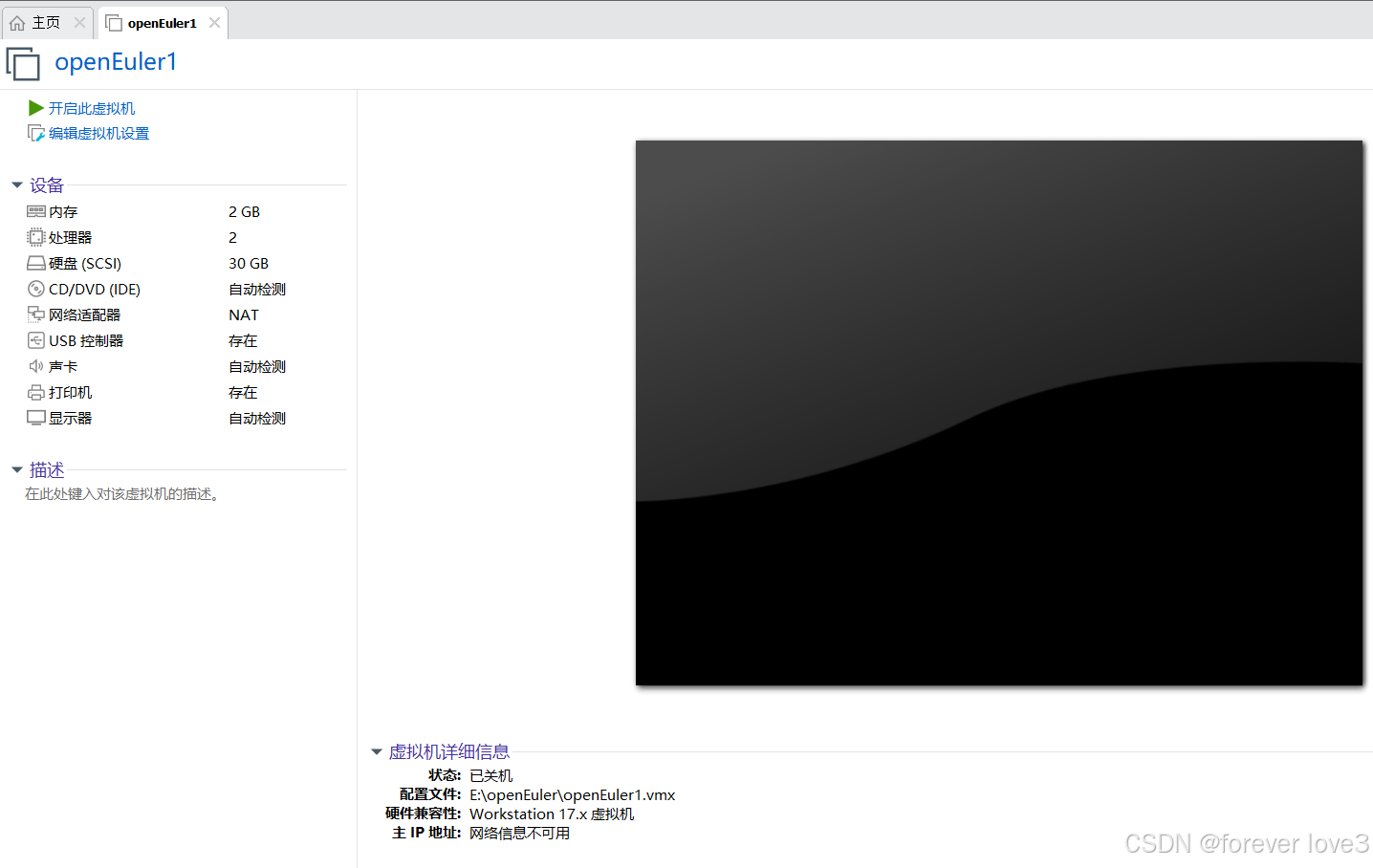
选择编辑虚拟机设置
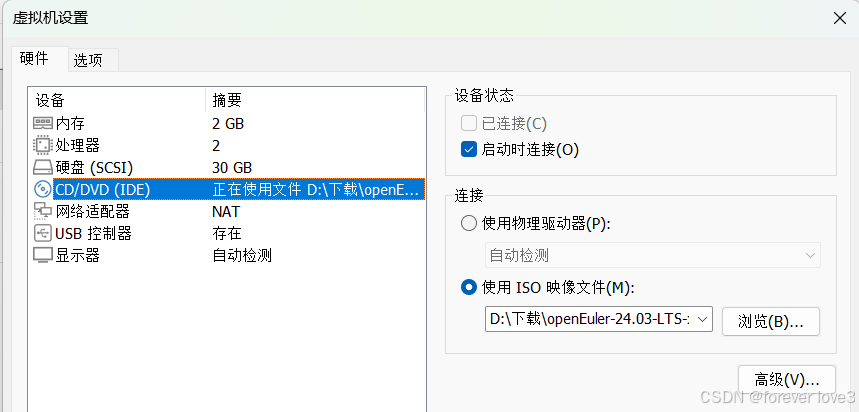
点击CD/DVD,选择使用ISO映像文件,点击浏览,找到之前下载的openEuler的Offline Standard ISO
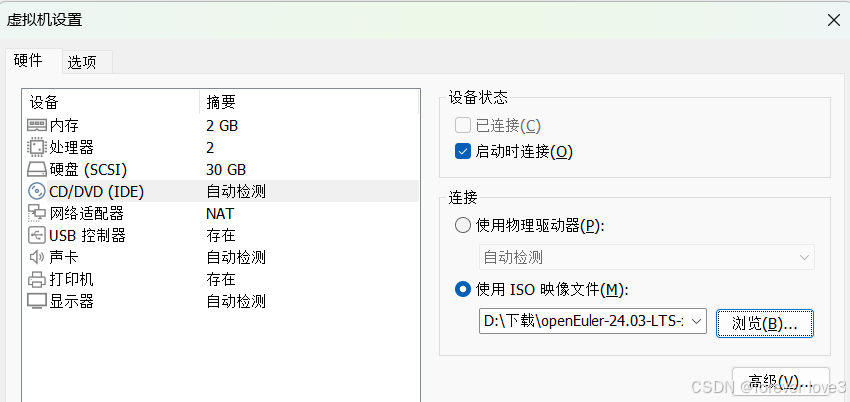
这里的打印机和声卡可以进行移除,移除完后,虚拟机设置页面如下
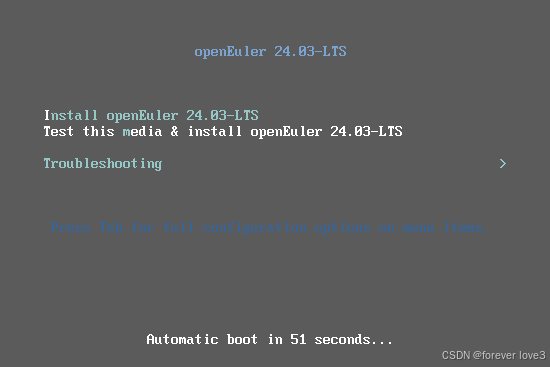
点击确定,然后点击开启虚拟机

按enter键后,简单等待一会儿
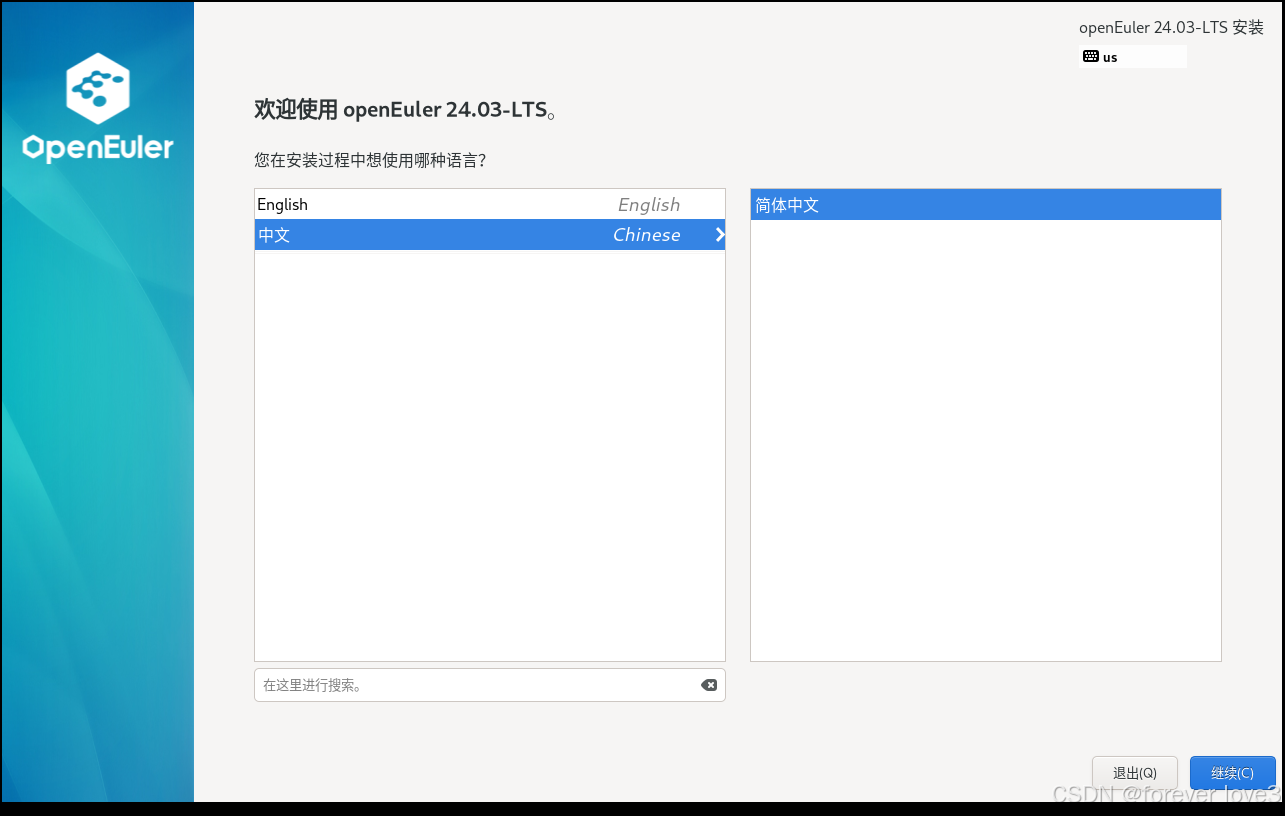
选择简体中文(当然,想要使用英文也ok,看个人习惯)
选择安装的目的地
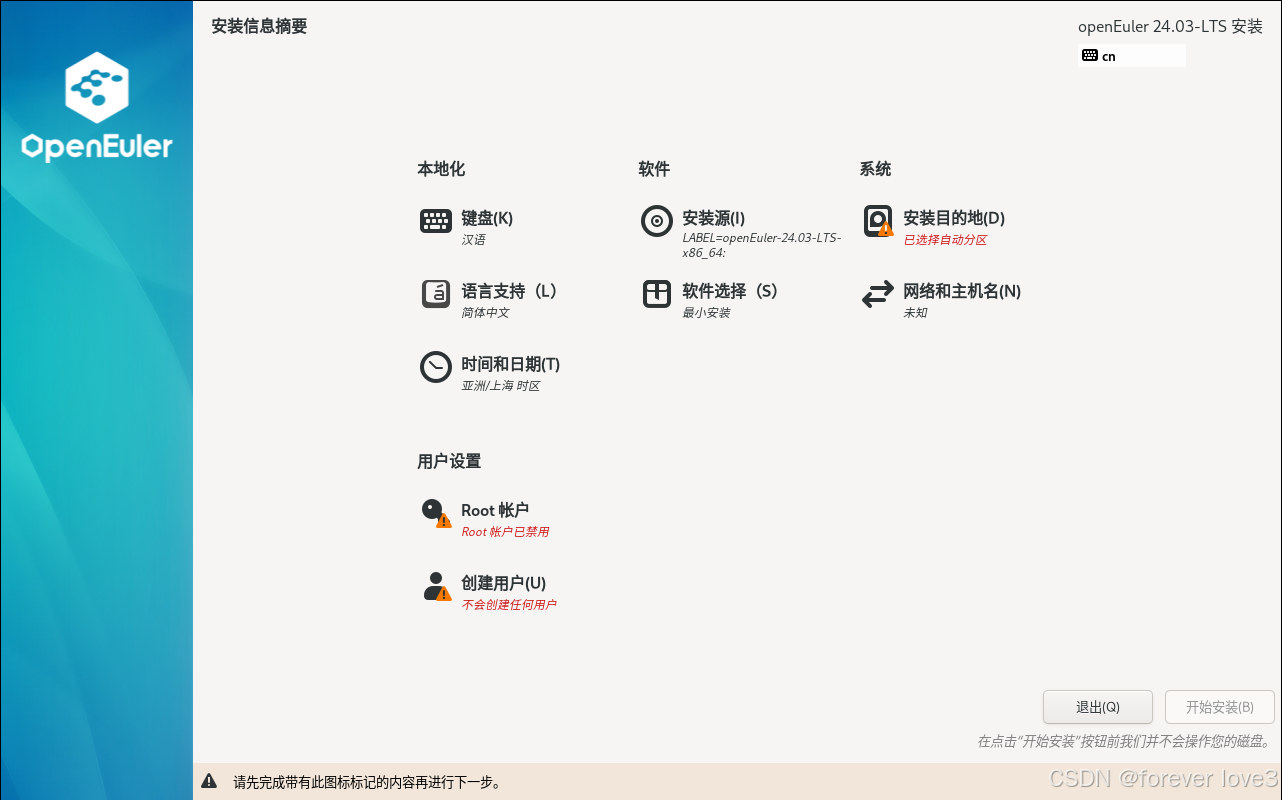
可以自动配置,也能自定义

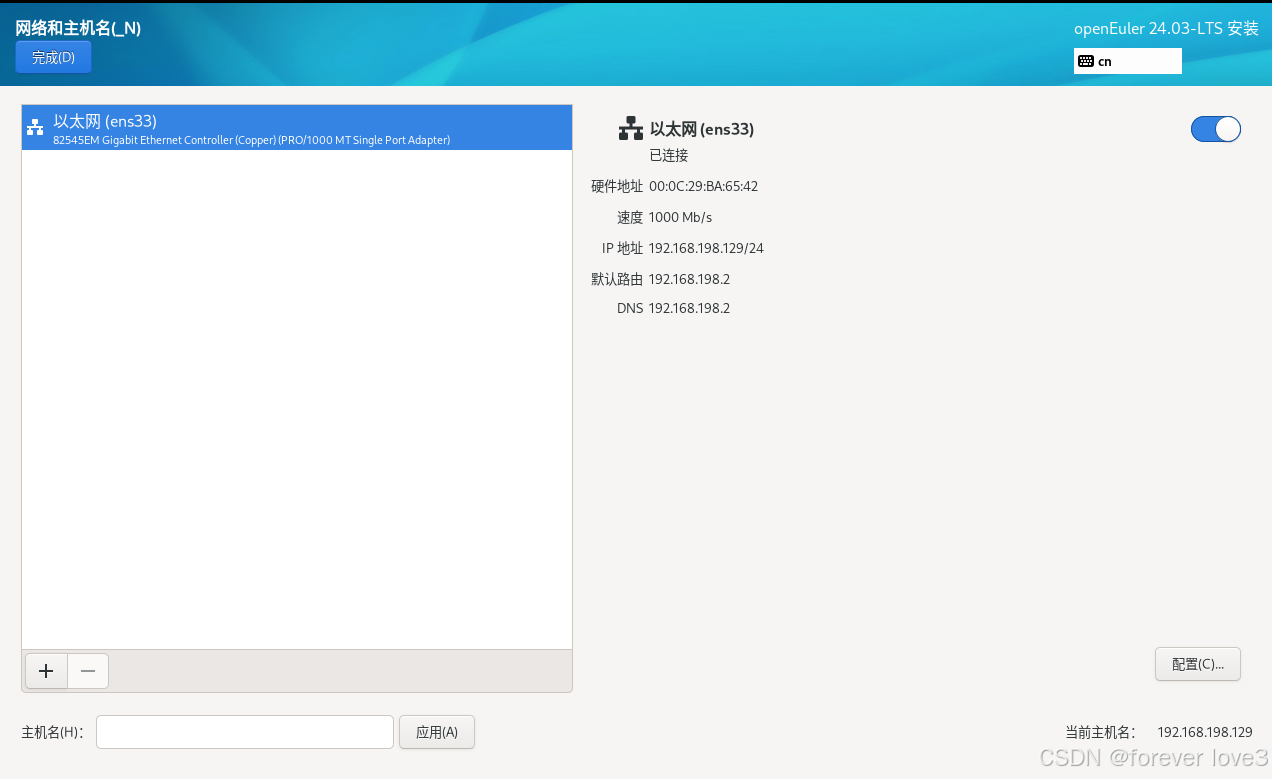
连接网络(如果需要的话)

打开虚拟网卡
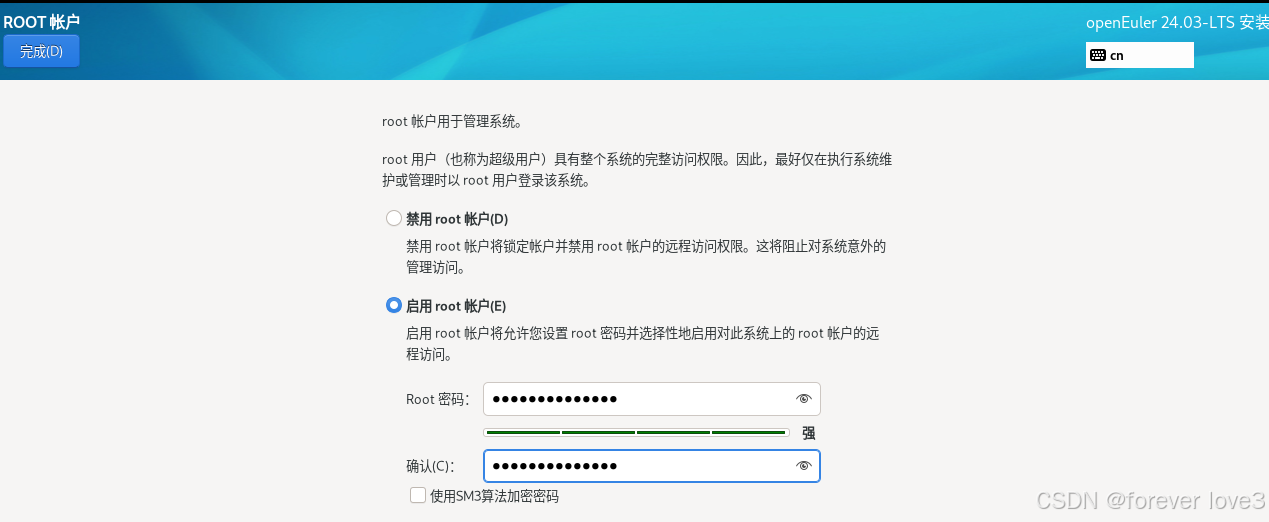
启动root账户,设置密码,注意密码强度要求,注意记好自己设置的密码,之后登录会反复用到
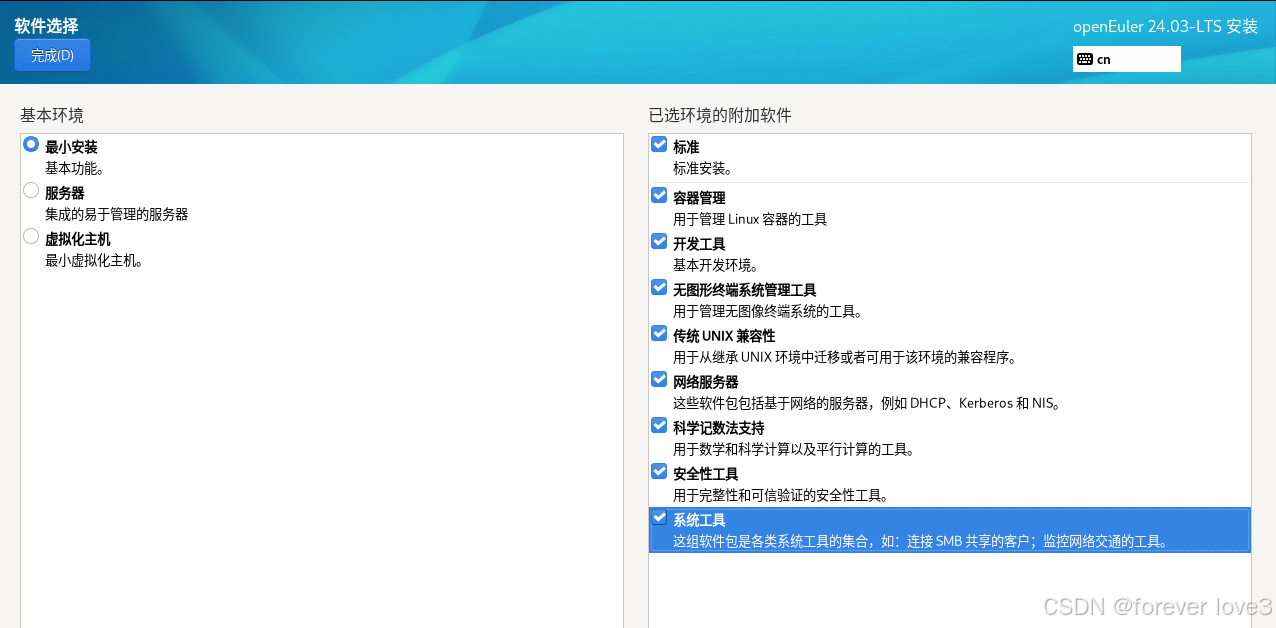
选择安装的组件,点击软件选择
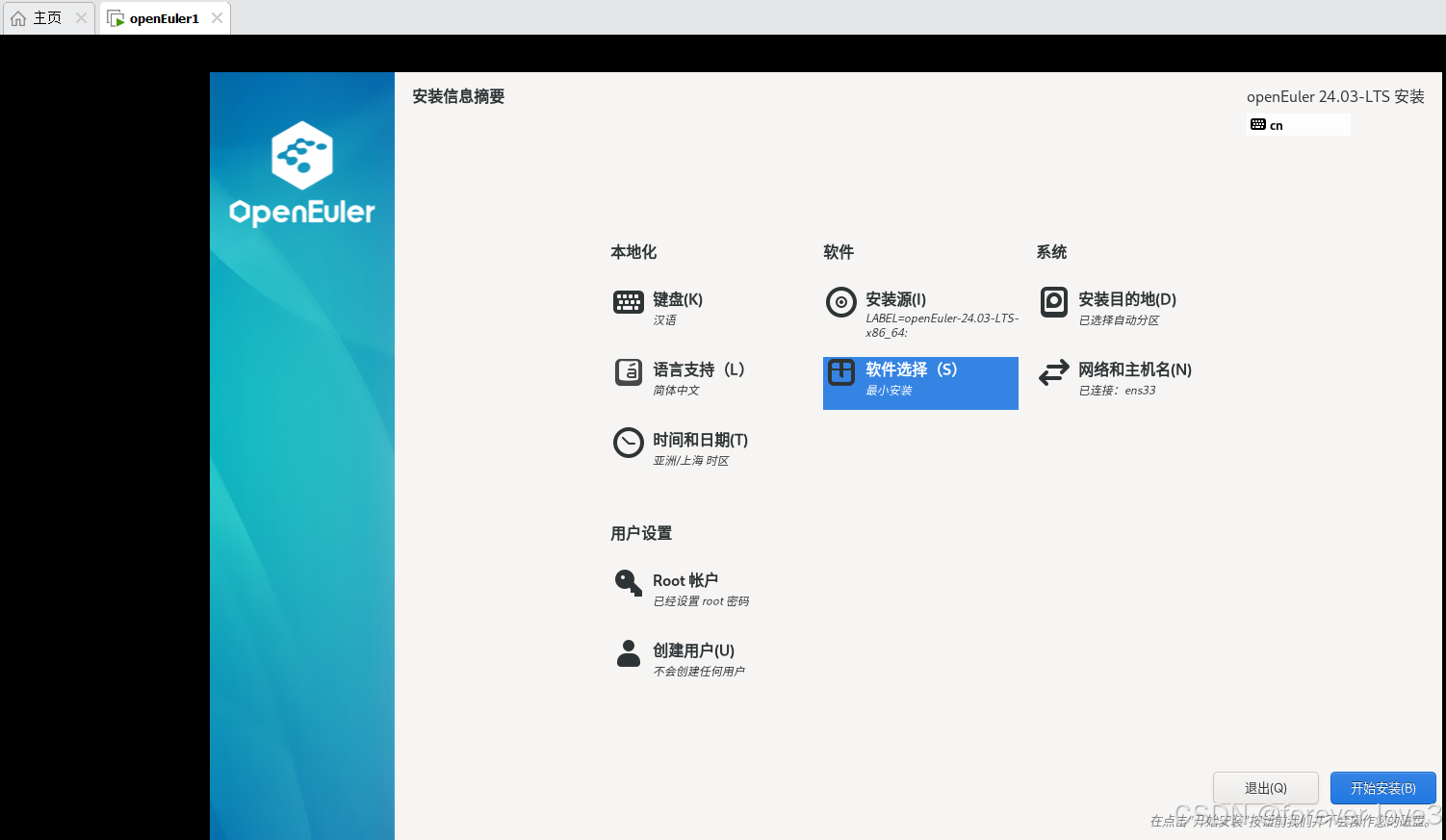
左边选择最小安装,右边已选环境的附加软件全选
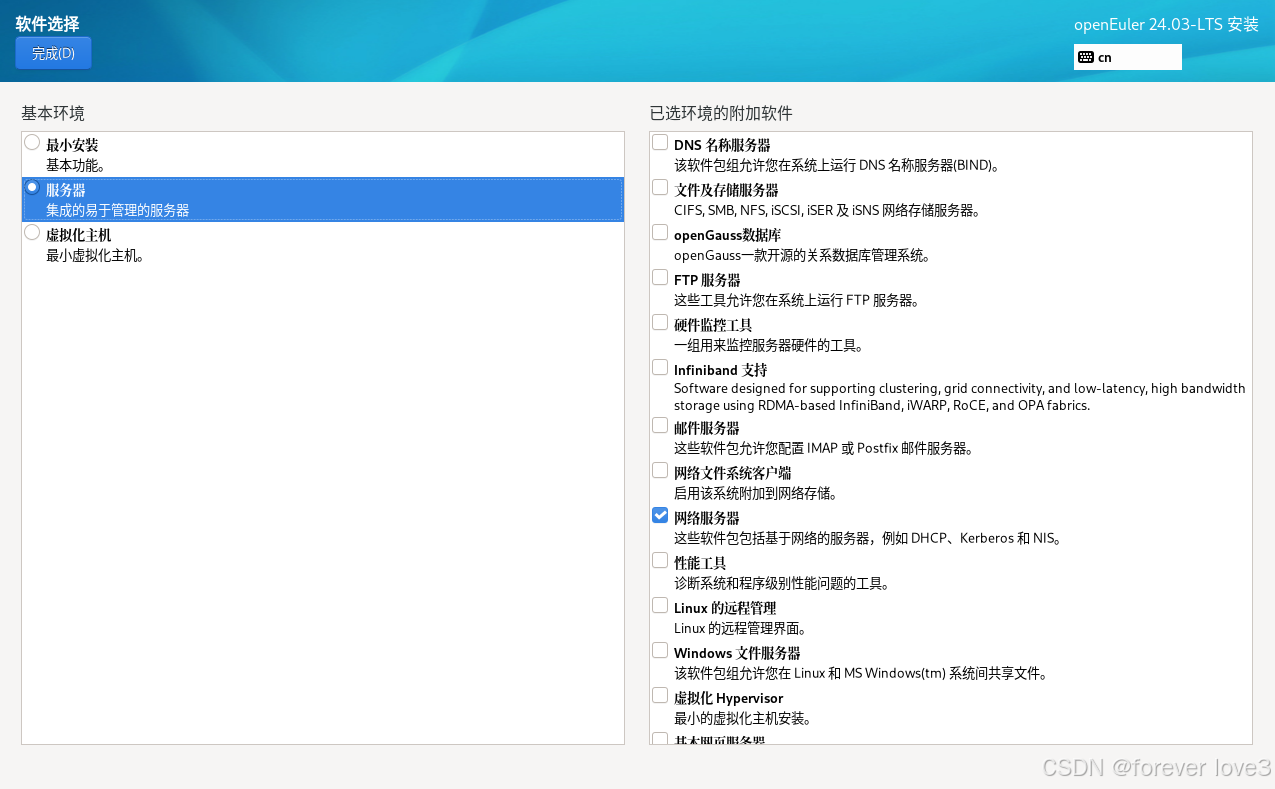
左边选择服务器,右边选择网络服务器
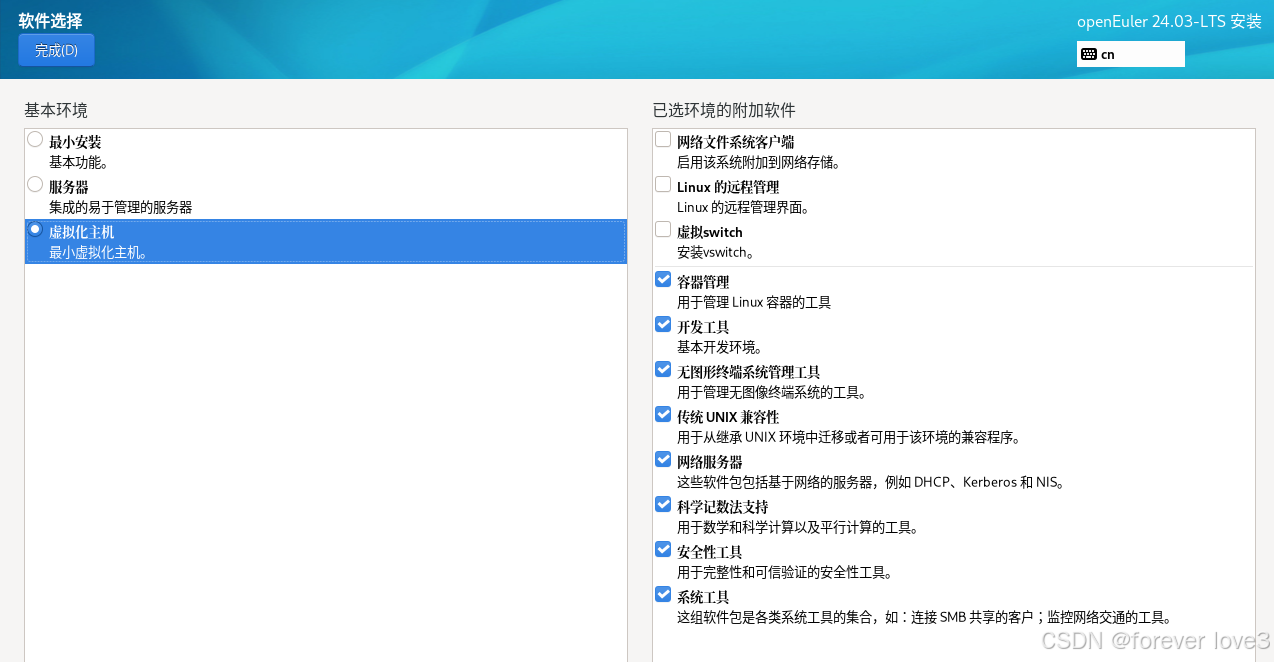
左边选择虚拟化主机,右边选择如下图所示
等待安装完成
安装完成,重启系统

重启后文字界面登录,login后面输入root,下面password,输入你刚刚设置的密码
4.关闭防火墙
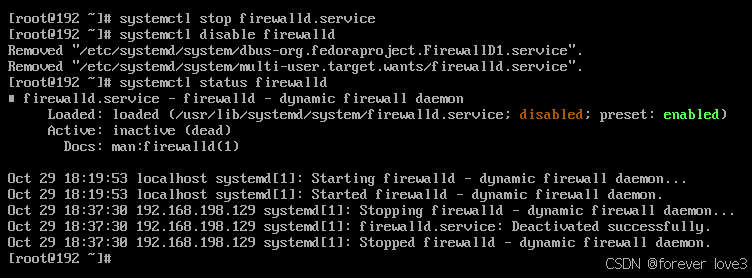
与防火墙有关的命令小结:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8740
8740

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









