







English Summary: Design, Properties, Examples, and Applications of Constraint Satisfaction Problems (CSP)
1. Design of CSPs
Constraint Satisfaction Problems (CSPs) are structured problems that consist of:
- A set of variables {X_1, X_2, ..., X_n\}.
- A set of domains DiD_i for each variable, which define possible values.
- A set of constraints {C_1, C_2, ..., C_m\}, specifying allowable value combinations.
Each constraint limits how variable values can be assigned to ensure valid solutions.
2. Properties of CSPs
- Assignment: Assigning values to variables.
- Consistent Assignment: Does not violate constraints.
- Complete Assignment: All variables receive values.
- Solution: A complete and consistent assignment.
- Optimization: In some cases, an objective function is used to find the best solution.
3. Examples of CSPs
- Map Coloring Problem:
- Each region of a map must be colored with one of three colors (Red, Green, or Blue).
- No two adjacent regions can have the same color.
- The problem can be represented using constraint graphs, where nodes are regions, and edges represent adjacency constraints.
4. Applications of CSPs
- Graph Coloring: Used in scheduling, register allocation in compilers, and circuit design.
- Sudoku and Puzzles: Formulated as CSPs where each cell must satisfy number constraints.
- AI Planning: Used in robotics, route planning, and automated reasoning.
- Resource Allocation: Assigning tasks, workforce, or assets under constraints.
中文翻译: 约束满足问题 (CSP) 的设计、性质、示例及应用
1. CSP的设计
约束满足问题(CSP)是结构化问题,由以下部分组成:
- 一组变量 {X_1, X_2, ..., X_n\}。
- 每个变量的取值范围(域) DiD_i 。
- 一组约束 {C_1, C_2, ..., C_m\},规定变量之间允许的值组合。
约束限制了变量的值分配方式,以确保解的有效性。
2. CSP的性质
- 赋值:为变量分配值。
- 一致性赋值:不会违反任何约束。
- 完全赋值:所有变量均被赋值。
- 解:一个完整且一致的赋值方案。
- 优化:某些情况下,通过 目标函数 找到最优解。
3. CSP的示例
- 地图着色问题:
- 地图上的每个区域必须用三种颜色(红、绿、蓝)之一着色。
- 相邻区域不能使用相同的颜色。
- 问题可用约束图(constraint graph) 表示,节点代表区域,边表示相邻区域的限制关系。
4. CSP的应用
- 图着色问题:用于排课、编译器寄存器分配、电路设计等。
- 数独与拼图:要求满足一定规则的约束问题。
- 人工智能规划:用于机器人、路线规划和自动推理。
- 资源分配:用于任务调度、人员分配和资产管理。
通俗解释
CSP 就像一个填色游戏:
- 你有多个变量(比如国家、省份、数独的格子)。
- 你可以为它们选择不同的值(比如颜色、数字)。
- 但必须遵守一定规则(比如相邻区域不能有相同颜色)。
- 你的目标是找到所有变量的合适值,让整个系统满足规则。
想象你要安排考试时间表:
- 变量 = 课程
- 值 = 考试时间段
- 约束 = 不能安排相同时间给同一学生的不同考试
CSP 让问题变得有统一规则,所以计算机可以用通用算法解决不同类型的任务。
English Notes for Memorization
-
CSP Components:
- Variables {X_1, X_2, ..., X_n\}
- Domains {D_1, D_2, ..., D_n\}
- Constraints {C_1, C_2, ..., C_m\}
-
CSP Key Properties:
- Assignment: Giving values to variables.
- Consistency: No constraint is violated.
- Completeness: All variables are assigned.
- Solution: A complete & consistent assignment.
-
Example: Map Coloring:
- Nodes = Regions
- Edges = Adjacency constraints
- Colors = Red, Green, Blue (cannot be the same for neighbors)
-
CSP Applications:
- Graph Coloring (Scheduling, Circuit Design)
- Sudoku & Games (Puzzle Solving)
- AI Planning (Robotics, Route Optimization)
- Resource Allocation (Task Scheduling)
By remembering CSP as a coloring or scheduling problem, it becomes easier to understand its general structure and wide applications.
拆解设计者的思维过程:为什么是“变量、域、约束”?
1. 设计者的核心目标:把“现实问题”抽象成“可计算的数学结构”
想象你是一个计算机科学家,面对五花八门的问题(地图着色、排课、数独),你发现它们的共性:
- 需要填的“坑” → 变量(Variables)
比如地图上的国家、课程表的课程、数独的格子 - 每个“坑”能填的“土” → 值域(Domains)
比如颜色、时间、数字 - 填土时的“禁忌规则” → 约束(Constraints)
比如相邻国家颜色不同、同一学生课程时间不冲突、数独行/列不重复
设计者的灵感:把现实问题中的“可调节参数”抽象为变量,把“可选方案”抽象为值域,把“规则限制”抽象为约束。这样,计算机就能用统一的方法(如回溯算法)解决所有这类问题。
2. 为什么是这三个概念?——从具体问题到抽象框架
案例1:地图着色
- 实际需求:给澳大利亚7个州着色,相邻州颜色不同。
- 设计者的观察:
- 变量 = 7个州(必须填的“坑”)
- 值域 = 红、绿、蓝(每个州能选的“土”)
- 约束 = 相邻州颜色不同(填土时的“禁忌”)
案例2:数独
- 实际需求:填满9x9格子,满足行/列/宫格不重复。
- 抽象映射:
- 变量 = 81个格子(每个格子是一个待填的“坑”)
- 值域 = 数字1-9(每个格子的“土”)
- 约束 = 行、列、3x3宫格内数字不重复(填数字的“禁忌规则”)
设计者的顿悟:所有这类问题都能抽象为“填坑-选土-避禁忌”的模型,于是CSP的三大概念诞生。
3. 为什么不用其他概念?——抓住问题的“最小必要元素”
设计者需要一套最简框架,既能覆盖大多数问题,又不引入冗余。试想:
- 如果只有变量和值域(没有约束):相当于随便填,没有规则,问题失去意义。
- 如果只有约束(没有变量和值域):约束无从作用,问题无法具体化。
变量、值域、约束是描述这类问题的最小完备集:
- 变量定义“问题中有哪些可调节的开关”
- 值域定义“每个开关能拨到哪些档位”
- 约束定义“哪些档位组合是合法的”
就像电路设计中的“电源、开关、逻辑门”——缺一不可。
4. 设计者的深层动机:让计算机像人类一样“推理”
人类解决填色或排课时,会:
- 观察哪里最难填(比如被最多邻国包围的州) → 变量选择启发式
- 排除不可能选项(比如邻国用了红色,自己就不能选红) → 约束传播
- 试错并回溯(选错颜色后擦掉重填) → 回溯算法
设计者把人类的直觉思考翻译成数学语言:
- 变量选择启发式 → 优先选“剩余可选值最少的变量”(最受限变量优先)
- 约束传播 → 用弧相容(AC-3算法)提前排除矛盾
- 回溯 → 系统化地探索解空间
CSP的本质:把人类的问题解决逻辑,转化为计算机可执行的步骤。
5. 终极答案:设计者是为了“标准化复杂问题”
- 标准化变量:让问题中的“可调节因素”明确化
比如物流问题中的“货物运输路线”作为变量 - 标准化值域:明确每个因素的“可选方案”
比如运输路线可选“空运、陆运、海运” - 标准化约束:用数学描述“现实世界的限制”
比如“易碎品不能陆运”“总成本不超过预算”
设计者的野心:用一套模型统一解决调度、优化、决策问题,让计算机成为“万能问题破解器”。这就是CSP的终极意义。
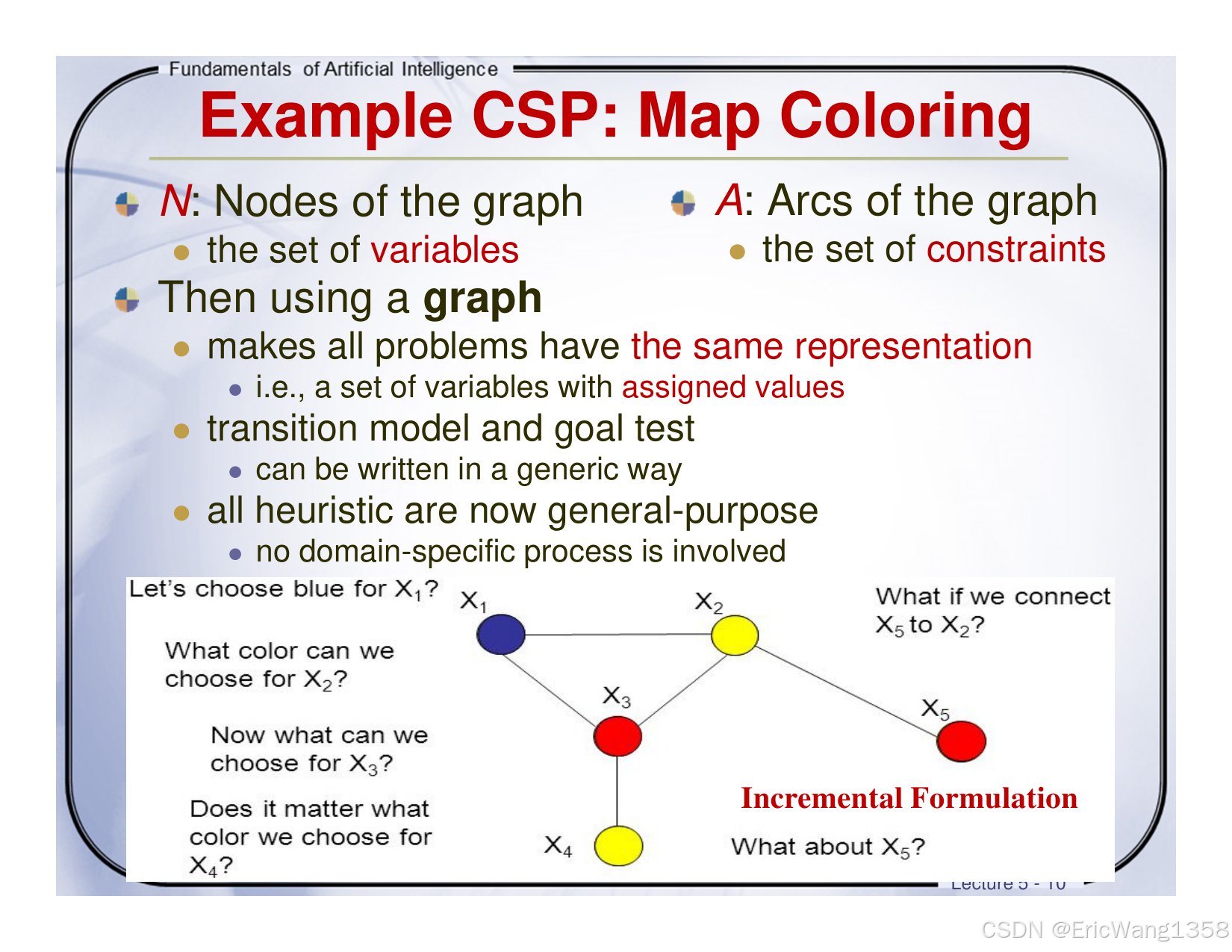
幻灯片 10:示例CSP——地图着色
- 节点(N):代表变量(地图中的区域)。
- 弧(A):代表约束(相邻关系)。
- 图表示:
- 使CSP在不同问题上具有通用性。
- 使用状态转移模型和目标测试。
- 可采用通用启发式进行求解。
要点:用给节点着色的方式逐步构建一个小型CSP问题。
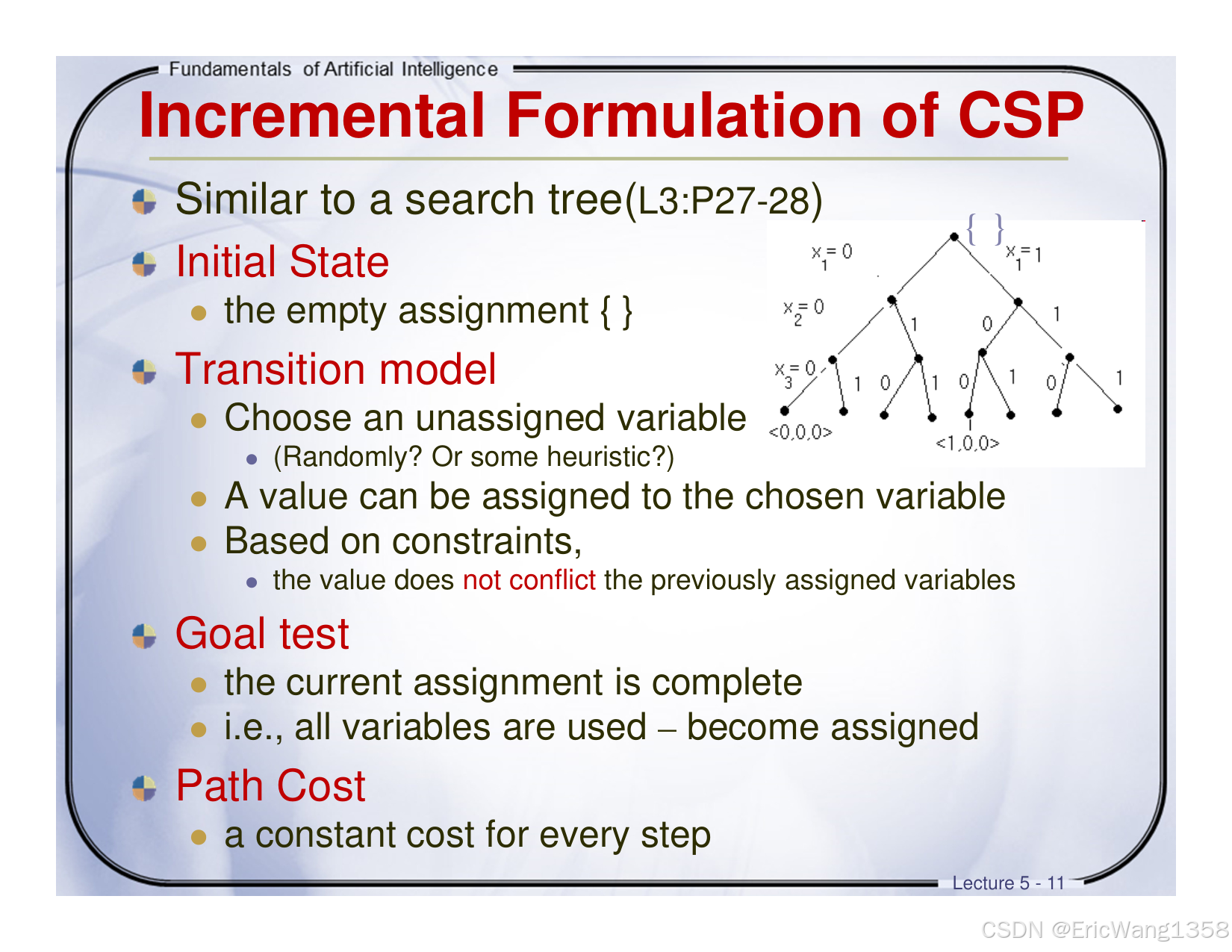
幻灯片 11:CSP的增量表述
- 类似搜索树:
- 初始状态:空赋值
{}。 - 转移模型:
- 选择一个未被赋值的变量。
- 为其分配符合约束的值。
- 目标测试:当所有变量都被赋值时,得到完整解。
- 路径代价:每一步通常是固定代价。
- 初始状态:空赋值
要点:可视化为一个分支树,依次给变量赋值。
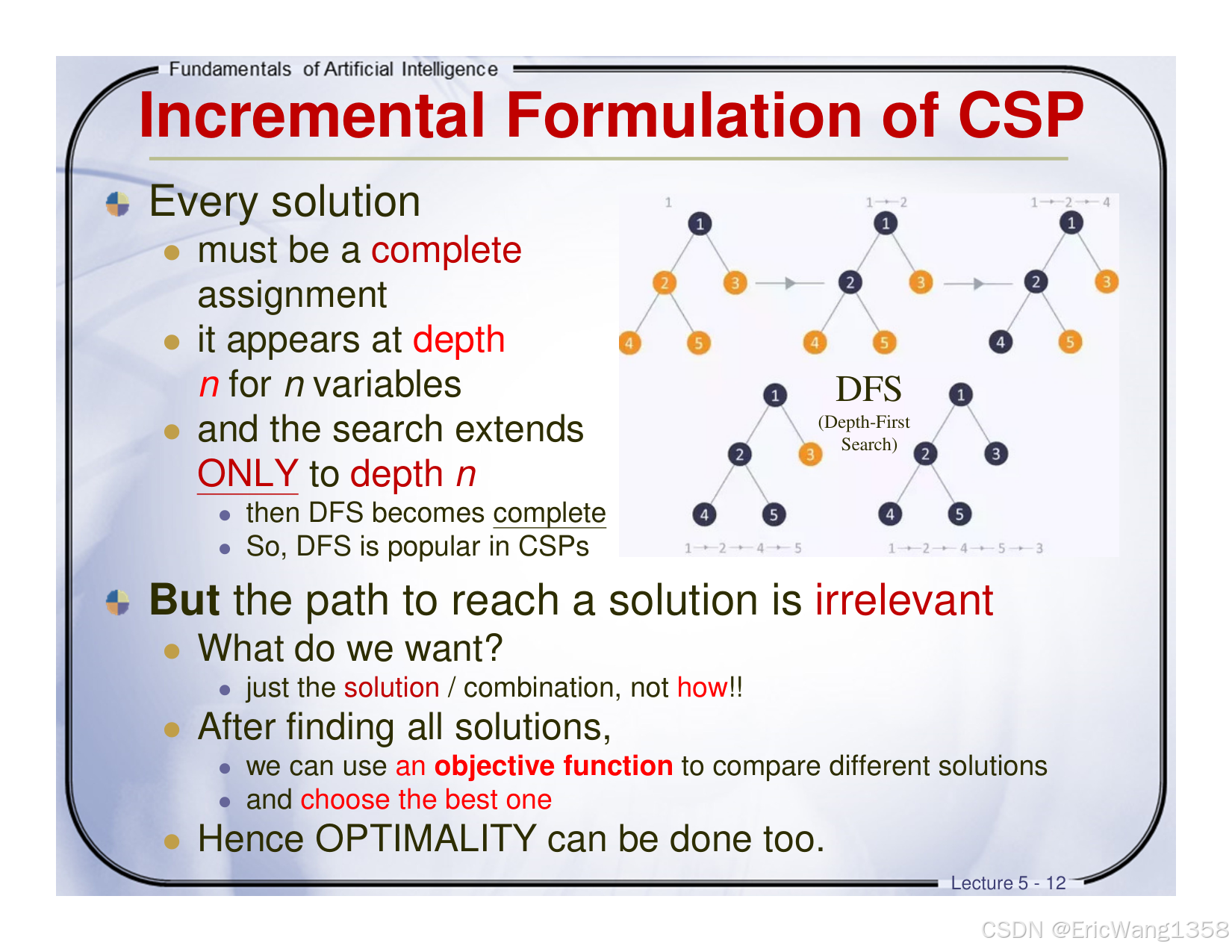
幻灯片 12:CSP的增量表述(DFS)
- 解的特征:
- 必须是完整赋值。
- 出现在搜索树的深度 n(n是变量数)。
- 仅需搜索到深度 n,深度优先搜索(DFS) 非常适合CSP。
- 路径并不重要:
- 我们只关心最终解,不在意搜索路径。
- 优化:可以加目标函数来选择最佳解。
要点:使用DFS构建搜索树,直到所有变量都完成赋值。
2. DFS的路径覆盖机制
深度优先搜索的增量表述要求逐层为变量赋值,每层对应一个变量的选择。例如,在数独问题中,每个空格的赋值对应搜索树的一层,81个空格对应深度81的搜索路径。
- 约束传播的局限性:尽管约束传播(如前向检验、弧相容)可以提前排除部分无效分支(如某变量值域为空时回溯),但这仅减少搜索宽度而非深度。DFS仍需按变量数n逐层展开,直到所有变量完成赋值或发现冲突。
3. 最坏情况下的深度必然性
虽然实际搜索中可能提前找到解(例如在深度k < n时已完成合法赋值),但以下两种场景仍要求搜索树深度为n:
- 唯一解位于最深层的场景:例如,某CSP的解要求最后一个变量的某个特定值才能满足约束,此时必须遍历到深度n。
- 无解场景的验证:若问题无解,DFS需遍历所有可能的完整赋值路径(深度n的叶子节点),才能最终确认无解
“增量表述”在CSP中的含义
一、通俗解释:一步步搭积木
想象你要用积木搭一座塔:
- 增量表述:每次只加一块积木,直到塔的高度达到目标层数。
- 每一步只处理一块积木(对应一个变量),且必须按顺序从底层到顶层逐步搭建。
- 必须搭满所有层数(n层),才算完成目标(完整解)。
CSP的增量表述:
- 每个变量的赋值就像放一块积木。
- 必须处理完所有变量(搭满n层)才能得到一个完整的解。
- 中途无法跳过任何步骤(无法提前完成)。
二、专业定义:逐步扩展部分解的搜索过程
在CSP的深度优先搜索(DFS)中,增量表述(Incremental Formulation) 指:
- 逐层构建解:每深入搜索树的一层,为一个变量赋值。
- 路径的完整性:解的路径必须覆盖所有n个变量(深度为n)。
- 回溯的机制:若当前赋值导致约束冲突,则回退到上一层(父节点),尝试其他可能的值。
核心特点:
- 逐步性:每次只处理一个变量,解是逐步构建的。
- 系统性:通过深度优先的顺序,穷举所有可能的赋值组合。
三、为什么必须到深度n?——解的结构要求
CSP的解必须满足完整性(所有变量均被赋值)。因此:
- 搜索树的每一层对应一个变量:
- 根节点(深度0):未赋值任何变量。
- 叶子节点(深度n):所有变量均被赋值,可能为合法解或冲突。
- 中途无法确认解的存在:
- 即使前k层(k < n)的赋值已满足所有约束,仍需继续为剩余n–k个变量赋值,才能验证是否全局一致。
- 反例:若中途停止(深度k < n),可能剩余变量因值域受限无法赋值,导致部分解无效。
案例:数独问题
- 即使前80个格子已正确填入数字,第81个格子可能因约束无值可选,此时需回溯调整之前的赋值。
四、增量表述 vs 非增量表述
| 对比维度 | 增量表述(CSP+DFS) | 非增量表述(如BFS或状态空间搜索) |
|---|---|---|
| 解的结构 | 逐变量赋值,路径长度为n | 可能跳跃式赋值,路径长度不确定 |
| 搜索深度 | 严格等于变量数n | 可能小于n(如通过合并状态提前找到解) |
| 适用场景 | 必须完整赋值的约束问题 | 部分赋值即可验证解的问题(如路径规划) |
| 典型算法 | 回溯算法(Backtracking) | A*算法、广度优先搜索(BFS) |
五、增量表述的优化:约束传播与启发式
尽管必须遍历到深度n,但通过以下方法减少无效搜索:
- 前向检验(Forward Checking):
- 每次赋值后,立即更新剩余变量的值域,提前排除冲突分支。
例如:地图着色中,若为变量A赋值红色,相邻变量B的值域自动移除红色。
- 每次赋值后,立即更新剩余变量的值域,提前排除冲突分支。
- 最受约束变量优先(MRV):
- 优先处理值域最小的变量(最可能触发约束传播)。
- 最少约束值优先(LCV):
- 为当前变量优先选择对剩余变量限制最少的值。
效果:
- 减少搜索树的宽度(剪枝无效分支),但深度仍为n。
- 例如:数独问题通过约束传播,实际搜索路径远小于理论最大值981。
六、总结:为什么“增量表述”是CSP的核心?
- 结构性:将问题分解为逐变量的决策步骤,符合人类逐步推理的习惯。
- 完备性:确保所有可能的解都被探索,避免遗漏。
- 可优化性:与约束传播、启发式策略无缝结合,提升搜索效率。
最终答案:
“增量表述”是CSP中一种逐层、逐步构建解的搜索方式,通过DFS确保所有变量被依次处理。尽管必须遍历到深度n,但通过约束剪枝和启发式策略,实际搜索效率远高于暴力枚举。这就像“必须填满所有空格,但用智能规则跳过死胡同”。
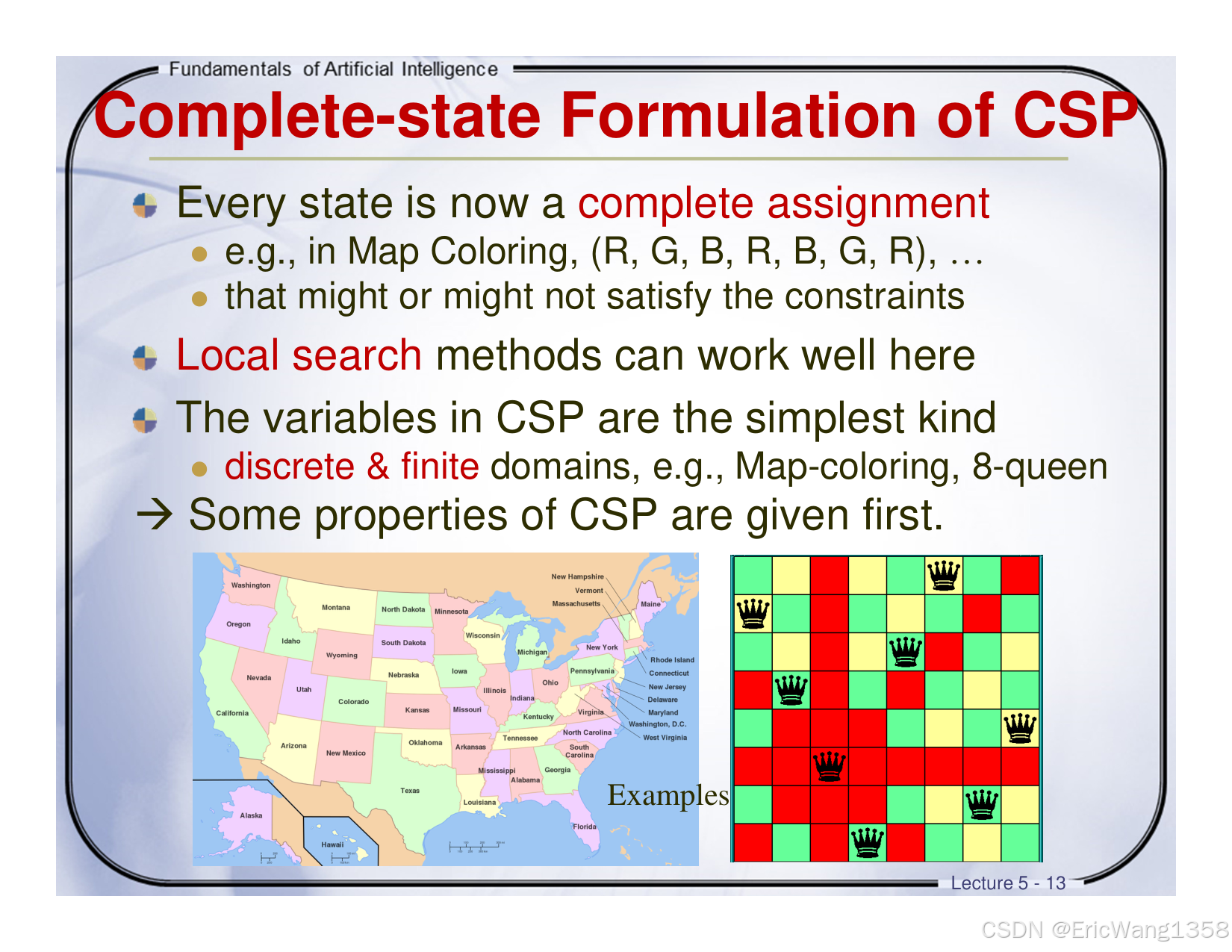
幻灯片 13:CSP的完全状态表述
- 完全赋值:
- 所有变量都有值(但不一定都满足约束)。
- 局部搜索:
- 适用于CSP,通过迭代改进解。
- 离散且有限的变量取值:
- 示例:地图着色、八皇后问题。
要点:展示了美国地图与八皇后问题,说明局部搜索可以在完整赋值的基础上迭代改进。
通俗与专业结合的“Complete State”解析
一、通俗比喻:填表格与交卷
想象你在填写一份考试卷:
- Partial State(部分状态):只填了选择题,填空题和大题还没写。
- Complete State(完整状态):所有题目都填了答案(不管对错)。
- Solution(解):所有题目都填了正确答案(既完整又正确)。
CSP中的Complete State:
- 所有变量都已被赋值(无论是否满足约束),就像交卷时必须填满所有题目。
- 只有同时满足所有约束的Complete State才是合法解,如同考试得满分。
二、专业定义:Complete State vs Solution
-
Complete State(完整状态)
- 定义:所有变量均被赋值(无论是否违反约束)。
- 特点:
- 出现在搜索树的叶子节点(深度等于变量数n)。
- 可能合法(满足所有约束),也可能非法(存在冲突)。
示例:
- 地图着色中,所有州都被赋予颜色(即使相邻州颜色相同)。
- 数独中,所有格子都填入数字(即使行/列/宫格重复)。
-
Solution(解)
- 定义:既是Complete State,又满足所有约束。
- 特点:
- 合法性验证需在赋值完成后进行。
- 只有部分Complete State是合法解。
示例:
- 地图着色中,所有相邻州颜色不同。
- 数独中,所有行、列、宫格数字不重复。
三、为什么Complete State必须深度为n?——搜索树的刚性规则
-
搜索树的逐层构建
- 每个层级对应一个变量的赋值。
- 根节点(深度0):未赋值任何变量。
- 叶子节点(深度n):所有变量均被赋值(Complete State)。
例如:在澳大利亚7州着色问题中,搜索树深度为7,每个叶子节点代表7个州均被着色(可能合法或非法)。
-
解的验证依赖Complete State
- 约束可能在赋值中途被违反(如地图着色中提前发现相邻州同色),但只有Complete State能验证全局合法性。
- 部分状态(Partial State)即使满足当前约束,也无法保证后续赋值不冲突。
反例:数独中前80格正确,但第81格可能无合法值,需回溯调整。
四、Complete State的应用场景
-
回溯算法(Backtracking)
- 深度优先搜索生成Complete State,验证后回溯剪枝。
- 例如:地图着色中尝试所有颜色组合,发现冲突则回溯。
-
约束优化问题(COP)
- 在Complete State基础上评估目标函数(如成本最小化)。
- 例如:物流调度中,所有货物分配路线后,计算总运输成本。
-
冲突分析与调试
- 通过非法Complete State定位冲突源头。
- 例如:芯片设计中发现信号干扰,需追溯具体布线错误。
五、总结:Complete State的本质
- 必要门槛:CSP的解必须通过Complete State的门槛,这是验证全局一致性的唯一方式。
- 效率平衡:尽管必须遍历到深度n,但通过约束传播和启发式策略,可以大幅减少无效Complete State的生成。
最终答案:
“Complete State”是CSP中所有变量均被赋值的状态(无论是否合法),它是验证解的必要条件。就像考试必须答完所有题才能评分,CSP必须生成Complete State才能判断是否满足约束。
为什么CSP图中提到“Local Search”?——完全状态下的高效探索
一、Local Search在CSP中的角色:从“完整但冲突”到“合法解”
在完全状态(Complete State)的CSP框架中,Local Search(局部搜索) 是一种通过逐步调整完整赋值来逼近合法解的策略。其核心思想是:
- 起点是一个完整但可能非法的赋值(例如所有州已着色但存在相邻同色)。
- 通过局部修改(如改变一个变量的值)逐步减少冲突数量,最终达到零冲突(合法解)。
图中的关键提示:
- “Local search methods can work well here” → 完全状态CSP适合用局部搜索,因为无需维护部分解的一致性,直接操作完整状态。
二、Local Search的核心操作
-
定义邻域(Neighborhood):
- 每个状态的邻域是所有通过单变量调整得到的新状态。
- 例如:地图着色中,修改一个州的颜色(从红→绿)生成一个邻域状态。
-
评估冲突(Objective Function):
- 目标是最小化违反约束的数量(冲突数)。
- 例如:八皇后问题中,冲突数为互相攻击的皇后对数。
-
选择优化方向:
- 贪婪策略:选择冲突减少最多的调整。
- 随机扰动:避免陷入局部最优(如模拟退火)。
案例:
- 地图着色:若当前赋值有3对相邻州同色,调整某州的颜色可能减少到1对冲突。
- 八皇后:移动一个皇后到某列,使其与其他皇后不冲突。
三、为什么Local Search在完全状态CSP中高效?
-
避免系统性回溯:
- 传统回溯需逐层探索所有可能路径,复杂度指数级。
- Local Search直接操作完整状态,复杂度与冲突调整次数相关,适合大规模问题。
-
空间复杂度低:
- 只需维护当前状态和冲突信息,无需存储搜索树。
-
容忍暂时冲突:
- 允许暂时违反约束,通过逐步优化逼近合法解。
对比传统方法:
| 维度 | 回溯法(DFS) | Local Search |
|---|---|---|
| 搜索方式 | 系统性遍历所有可能路径 | 随机或启发式调整当前状态 |
| 适用场景 | 小规模、精确解需求 | 大规模、快速近似解需求 |
| 冲突处理 | 遇到冲突立即回溯 | 允许暂时冲突,逐步优化 |
四、经典算法:最小冲突算法(Min-Conflicts)
-
步骤:
- 随机生成一个完整赋值(可能冲突)。
- 循环直到冲突数为0:
- 随机选择一个冲突变量(如相邻同色的州)。
- 将其值调整为当前值域中引发最少新冲突的值。
-
案例:
- 八皇后问题:平均仅需约50步调整即可找到合法解,远快于回溯法的8!=40320次尝试。
- 数独求解:通过调整冲突格子的数字,快速收敛到合法解。
五、Local Search的局限性
- 可能陷入局部最优:
- 若所有局部调整都无法减少冲突,需引入随机性(如随机重启)。
- 不保证找到解:
- 适用于存在较多解的问题(如地图着色),若问题无解则无法终止。
六、总结:图中为何强调Local Search?
- 完全状态的特性:允许从任意完整赋值出发,通过局部调整快速收敛。
- CSP的离散有限域:变量值域明确,便于定义邻域操作。
- 大规模问题的实用性:对高维CSP(如百万变量调度问题),Local Search是唯一可行方法。
最终答案:
图中提到Local Search,是因为在完全状态的CSP中,它提供了一种高效启发式探索路径——从冲突的完整赋值出发,通过局部调整逼近合法解,尤其适合大规模或近似解需求的问题,如地图着色、八皇后、排课调度等。
幻灯片 14:CSP的复杂性
- 若最大域大小为 d:
- 所有可能赋值总数为 O(d^n)。
- 例如:地图着色若 d=3,则有 O(3^7)。
- 指数型增长:
- 随着变量数量增加,求解难度急剧上升。
- 效率:
- 虽然理论上是指数时间,但实际能通过启发式或搜索策略高效求解。
要点:强调CSP在理论上复杂度很高,但在实践中依然可行。
幻灯片 15:约束的类型
- 一元约束:
- 只涉及一个变量(如“SA ≠ 绿色”)。
- 可预处理以减少搜索空间。
- 二元约束:
- 涉及两个变量(如“SA ≠ NSW”)。
- 在约束模型中最常见。
要点:介绍不同约束形式对CSP求解的影响。
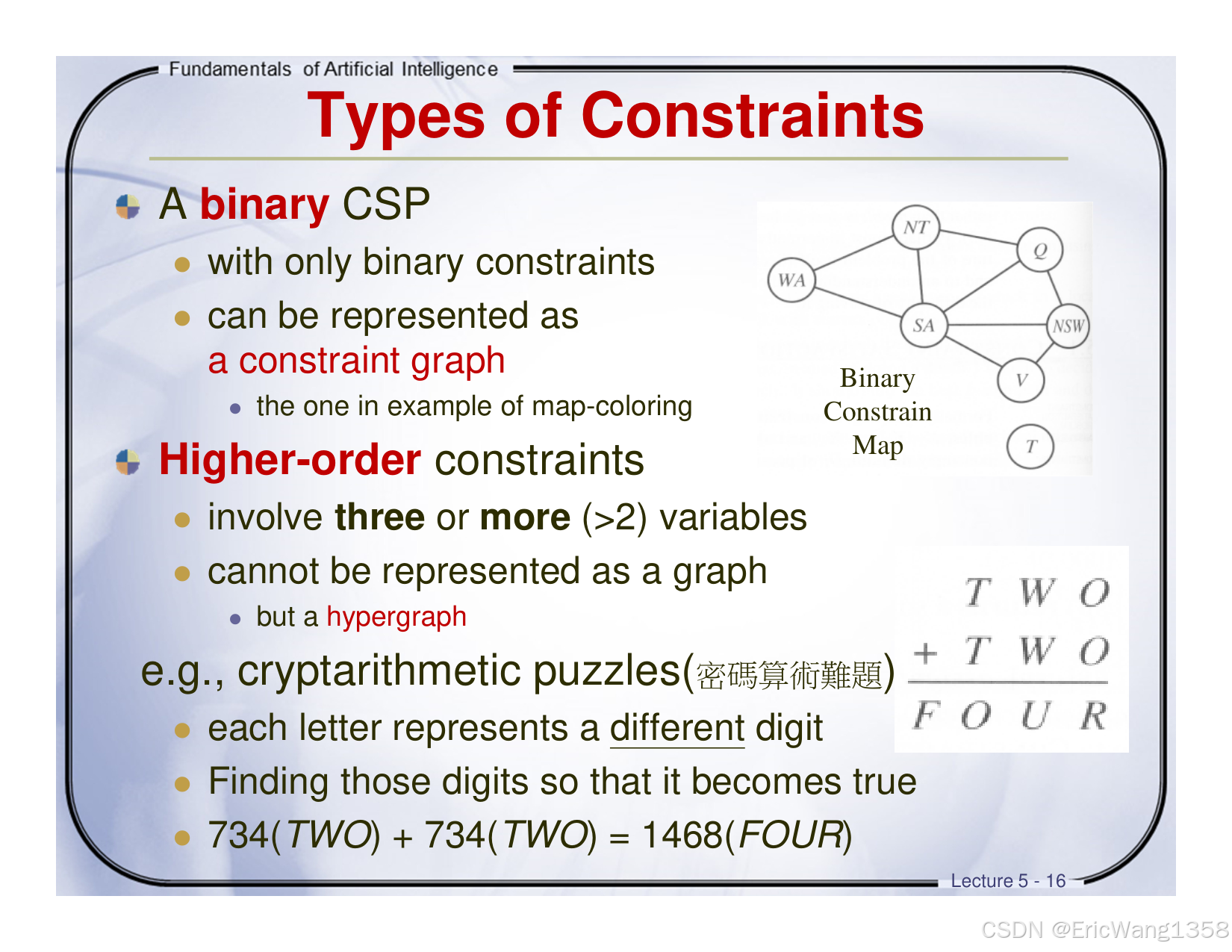
幻灯片 16:二元和高阶约束
- 二元CSP:
- 只包含二元约束。
- 可用约束图表示,图中的边代表变量之间的约束。
- 高阶约束:
- 涉及三个或以上变量。
- 无法用普通图表示,而需使用超图。
- 示例:文字算术谜题(如TWO + TWO = FOUR)。
要点:二元约束适合用简单图,三元及以上约束需更复杂的结构表示。
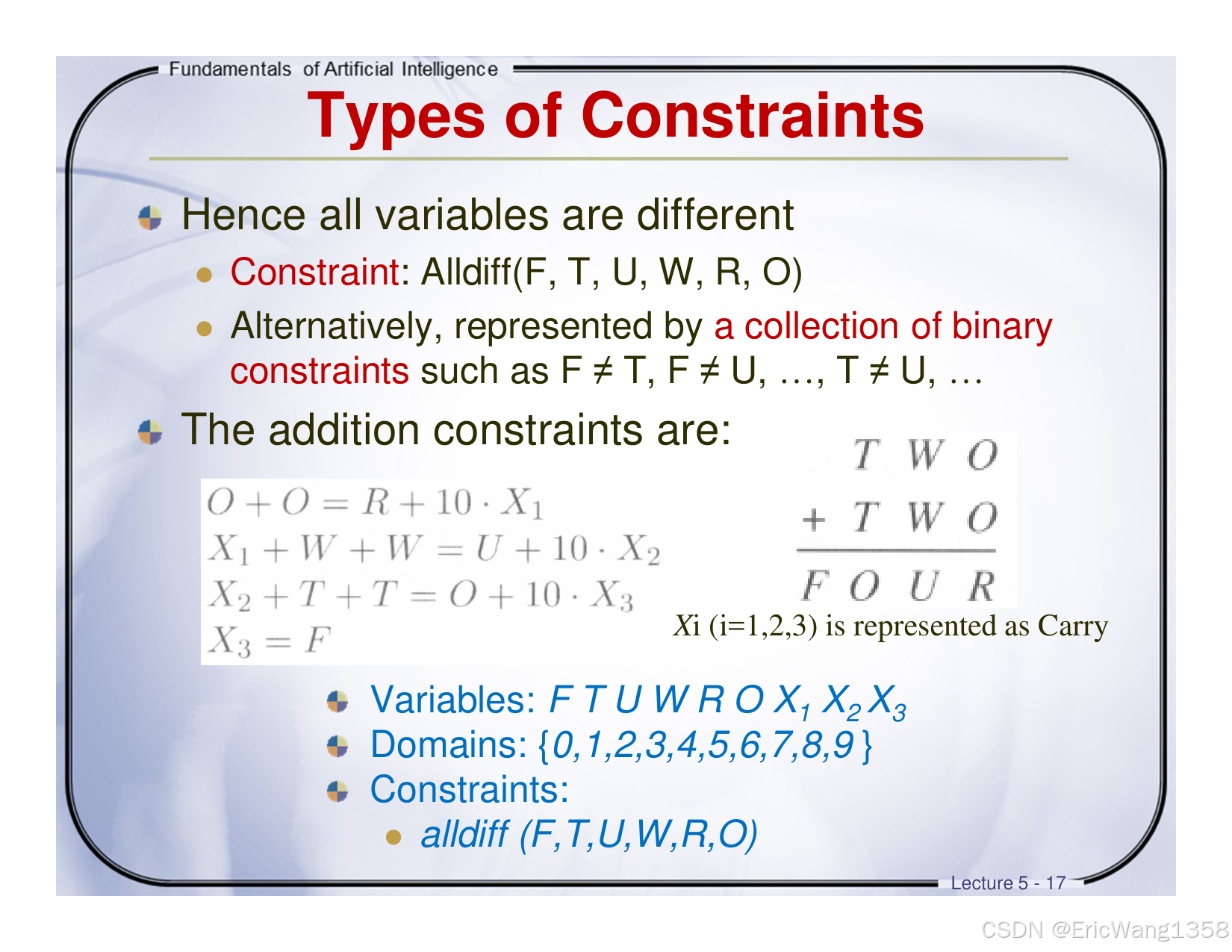
幻灯片 17:文字算术谜题的约束
- 变量必须两两不同:
- 常用的约束:Alldiff(F, T, U, W, R, O)。
- 或分解成多个二元约束(F≠T, T≠U, 等)。
- 数学约束:
- 字母对应的数字必须满足加法方程。
要点:通过字母加法展示了如何将高阶数学关系转化为CSP约束。
English Summary for Each Slide
Slide 10: Example CSP – Map Coloring
- Nodes (N): Represent variables (regions on a map).
- Arcs (A): Represent constraints (adjacency relations).
- Graph Representation:
- Makes CSPs uniform across problems.
- Uses a transition model and goal test.
- General-purpose heuristics apply.
👉 Illustration: A small CSP problem is incrementally built by assigning colors to nodes.
Slide 11: Incremental Formulation of CSP
- Similar to a search tree:
- Initial State: Empty assignment
{}. - Transition Model:
- Select an unassigned variable.
- Assign a value while ensuring constraints are met.
- Goal Test: Solution is complete when all variables have values.
- Path Cost: A constant cost per step.
- Initial State: Empty assignment
👉 Illustration: A branching tree where variables are assigned in sequence.
Slide 12: Incremental Formulation of CSP (DFS)
- Solution properties:
- Must be a complete assignment.
- Appears at depth n (n variables).
- Search extends only to depth n, making Depth-First Search (DFS) well-suited for CSP.
- Path irrelevance:
- We care about the solution, not how we got there.
- Optimization: An objective function can be used to pick the best solution.
👉 Illustration: DFS tree representation for solving CSP problems.
Slide 13: Complete-state Formulation of CSP
- Complete assignment:
- All variables are assigned values (not necessarily valid).
- Local search:
- Works well for CSP, refining solutions iteratively.
- Discrete & finite domains:
- Example: Map-coloring, 8-queens problem.
👉 Illustration: A US state map and an 8-queen problem grid.
Slide 14: Complexity of CSP
- If max domain size dd:
- The number of possible assignments is O(dⁿ).
- Example: Map coloring where d=3d = 3 results in O(3⁷) complexity.
- Exponential growth:
- As the number of variables increases, solving becomes harder.
- Efficiency:
- Despite exponential complexity, CSP techniques solve problems efficiently.
👉 Illustration: A cartoon representing the overwhelming complexity of CSP.
Slide 15: Types of Constraints
- Unary Constraints:
- Involve one variable (e.g., "SA ≠ green").
- Can be preprocessed to reduce complexity.
- Binary Constraints:
- Involve two variables (e.g., "SA ≠ NSW").
- Common in constraint-based models.
👉 Illustration: Different types of constraints in CSP.
Slide 16: Binary & Higher-order Constraints
- Binary CSP:
- Uses only binary constraints.
- Can be represented as a constraint graph.
- Higher-order Constraints:
- Involve three or more variables.
- Cannot be represented as a normal graph, but as a hypergraph.
- Example: Cryptarithmic puzzles (TWO + TWO = FOUR).
👉 Illustration: Graph representation and a cryptarithmic puzzle.
Slide 17: Cryptarithmic Puzzle Constraints
- All variables must be different:
- Constraint: Alldiff(F, T, U, W, R, O)
- Alternative: Collection of binary constraints (F ≠ T, T ≠ U, etc.).
- Mathematical Constraints:
- Digits must satisfy arithmetic equations.
👉 Illustration: Mathematical representation of letter-based addition puzzles.
Summary of CSP
- Graph-based approach simplifies problem representation.
- Incremental search models (DFS) help solve CSP.
- Complexity grows exponentially but can be managed efficiently.
- Constraints guide variable assignments and restrict invalid solutions.
- Real-world applications: Scheduling, Sudoku, AI planning, resource allocation.
幻灯片 18:“CSP中的无启发式搜索与启发式搜索”
- 核心思路:对比了在约束满足问题(CSP)中使用两种搜索策略:
- 无启发式搜索(Uninformed Search):没有特定启发式的系统化遍历。
- 启发式搜索(Informed Search):利用问题的特定信息或通用启发式来提高搜索效率。
- 背景:该片介绍在CSP中如何用最简单的方式(无启发式)或更智能的方式(启发式)来进行搜索。
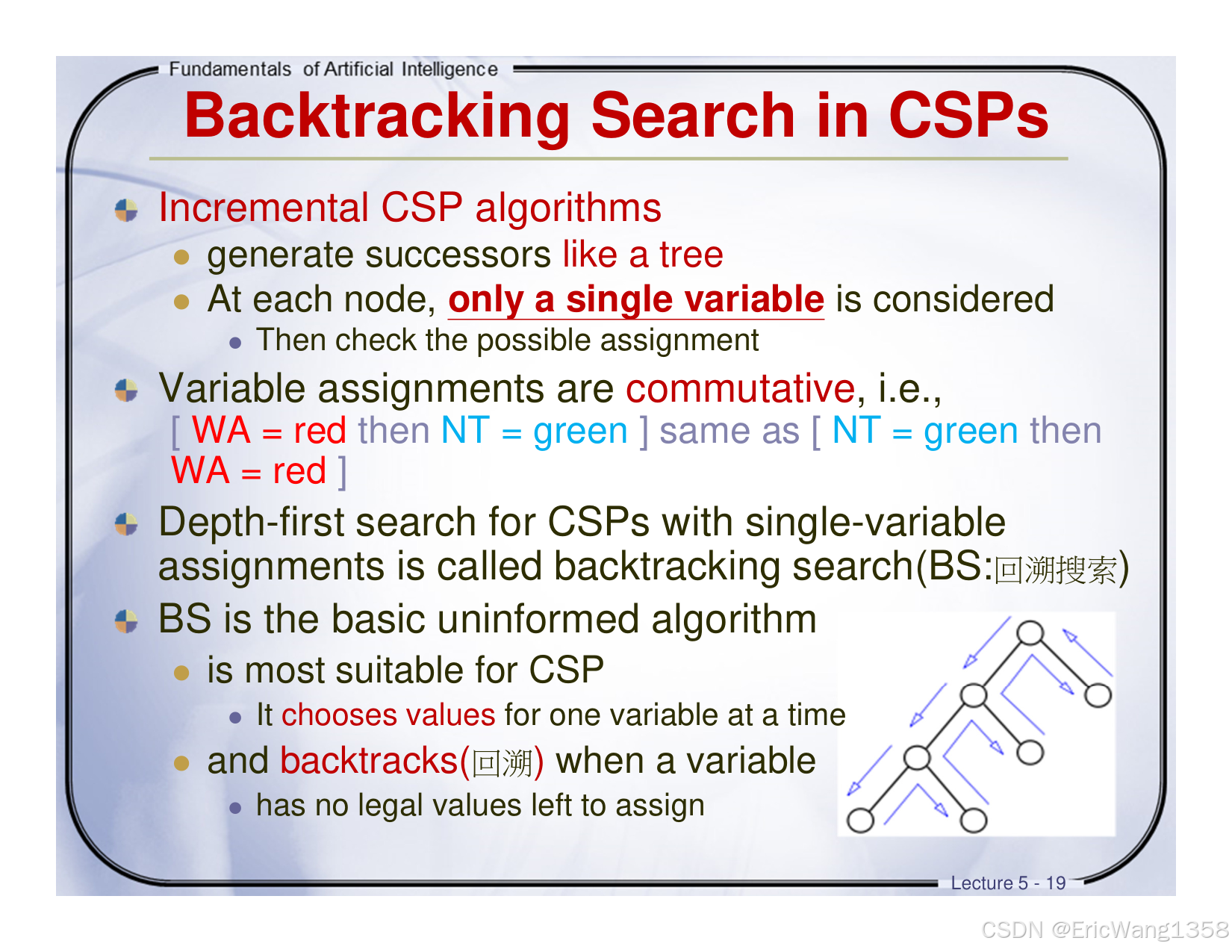
幻灯片 19:“CSP中的回溯搜索(Backtracking Search)”(上)
- 增量式CSP算法:像构造一棵搜索树一样,每次仅给一个变量赋值。
- 可交换赋值(Commutative Assignments):先给
WA=red然后NT=green,和先给NT=green再WA=red在最终结果上没差别。 - 深度优先搜索(DFS) + 单变量赋值就称为回溯搜索(Backtracking Search,BS)。
- 回溯搜索原因:它是CSP最基本的“无启发式”解法,逐个变量尝试赋值,如果无法继续,就回溯到上一步重新尝试。
为什么CSP中的赋值顺序不影响结果?——可交换赋值的本质
一、专业解释:约束的静态性与独立性
在约束满足问题(CSP)中,约束是变量之间的静态关系,而非依赖于赋值顺序的动态规则。
例如,在地图着色问题中,约束是“相邻区域颜色不同”,无论赋值顺序如何,最终结果只需满足这一条件。
- WA=红和NT=绿的赋值顺序:
- 若先赋WA=红,则NT的可用值域自动排除红色。
- 若先赋NT=绿,则WA的可用值域自动排除绿色。
- 结果等价性:只要最终WA和NT的值不同,无论顺序如何,均满足约束。
数学本质:
CSP的约束是布尔逻辑表达式(如WA ≠ NT),其真值仅由变量的最终值决定,与赋值顺序无关。
二、通俗比喻:拼图与规则
想象你在拼一副拼图:
- 规则:相邻拼图块必须颜色匹配。
- 拼装顺序:无论先拼左上角还是右下角,只要最终所有相邻块颜色匹配即可。
- 可交换性:调整拼图块的顺序不影响最终成品的合法性。
CSP的类比:
- 拼图块 = 变量
- 颜色匹配规则 = 约束
- 拼装顺序 = 赋值顺序
三、设计者的底层逻辑:约束的全局性
CSP的设计者将问题抽象为静态的变量-约束网络,而非动态的状态转移过程:
- 变量独立性:每个变量的值仅受其直接约束的变量影响,而非历史路径。
- 约束的同步性:所有约束在赋值完成后统一验证,而非按顺序逐步生效。
案例对比:
- 非交换性场景(如状态空间搜索):
机器人移动顺序(先左转再前进 vs 先前进再左转)会导致不同位置,路径依赖性强。 - CSP的可交换性:
变量赋值的最终合法组合唯一,顺序不影响结果。
四、为什么其他算法中顺序可能重要?
在非CSP问题中(如规划问题或强化学习),动作的时序性会影响结果:
- 动态环境:动作执行后环境状态改变,后续动作基于新状态。
- 顺序敏感:例如“先加水再加热”与“先加热再加水”结果不同。
CSP的独特性:
- 无状态性:变量的赋值不改变问题本身的约束结构。
- 全局验证:所有约束仅在最终状态统一检查,而非按顺序触发。
五、总结:CSP中的“可交换性”从何而来?
- 约束的静态定义:所有规则预先确定,不随赋值过程改变。
- 最终一致性验证:合法解仅取决于最终赋值是否满足所有约束,而非中间路径。
- 设计哲学:CSP的目标是找到满足所有约束的静态解,而非描述动态过程。
最终答案:
CSP的赋值顺序不影响结果,因为约束是全局、静态的规则。无论先给WA还是NT赋值,只要最终它们的颜色不同,约束即被满足。这就像“填色游戏的规则只看最终颜色分布,不管你先涂哪块”。设计者通过这种抽象,将问题简化为纯粹的逻辑满足,而非过程依赖。
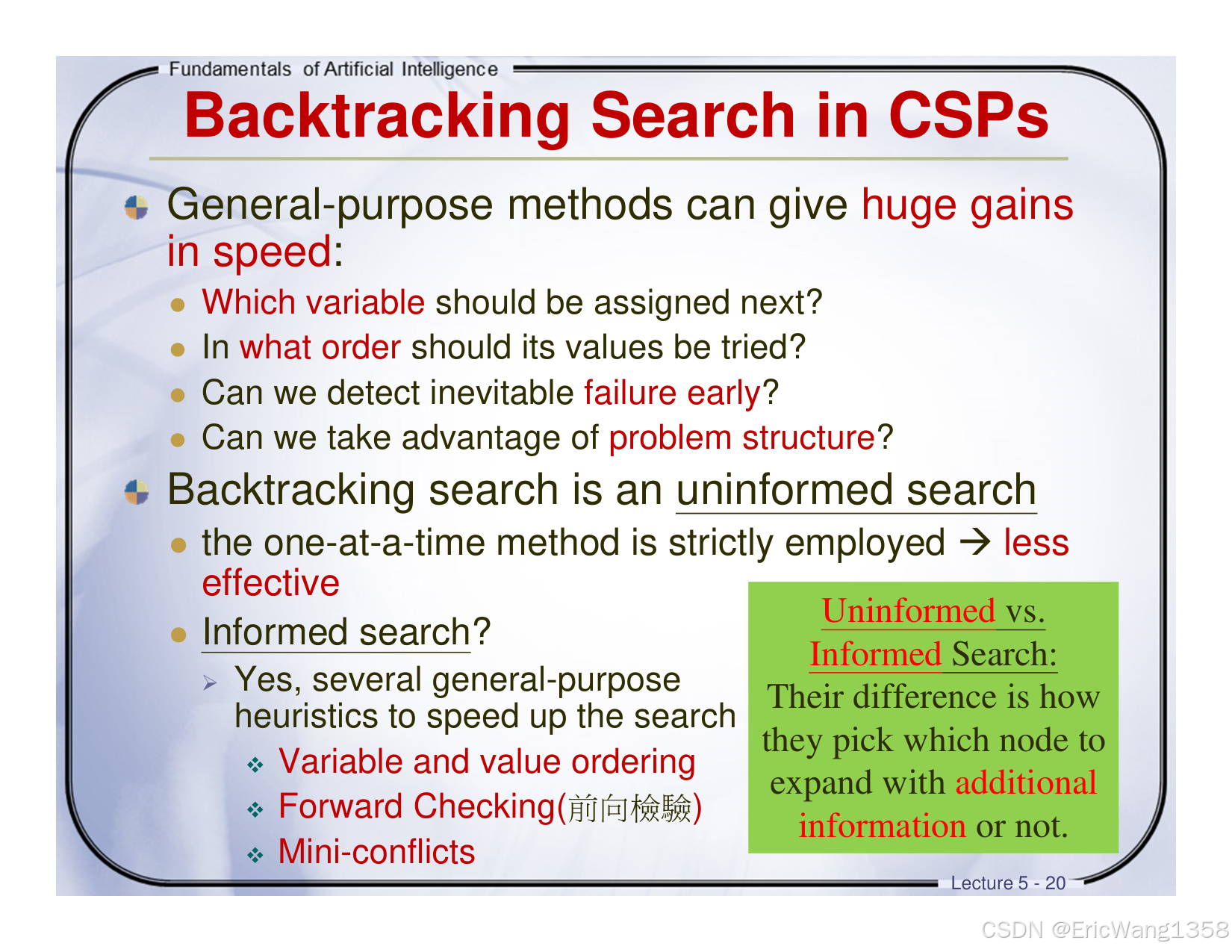
幻灯片 20:“CSP中的回溯搜索”(下)
- 通用方法可加速搜索,主要包括:
- 决定下一个要赋值的变量。
- 决定给该变量赋值的顺序。
- 提早检测可能的失败。
- 利用问题结构来减少搜索空间。
- 回溯搜索如果采用一成不变的顺序分配变量,也只是无启发式搜索。
- 启发式搜索在CSP中可能包括:
- 变量选择和取值顺序(如MRV、Degree等)
- 前向检查(Forward Checking)
- 基于冲突的改进方法(如Mini-Conflicts)
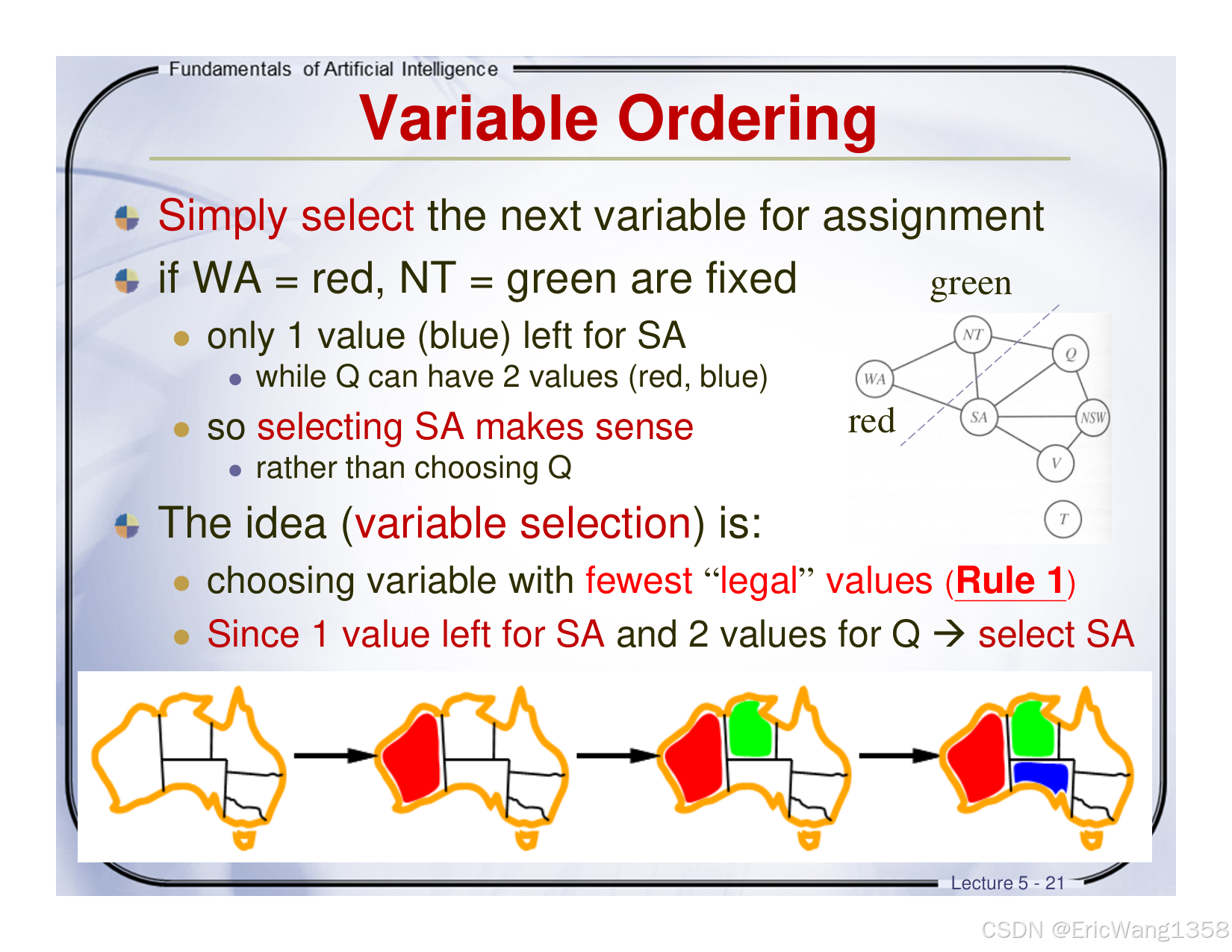
幻灯片 21:“变量选择顺序”(一)
- 关键决策:下一步该给哪个变量赋值?
- 示例:
- 如果
WA=red、NT=green已定,那么SA只剩一种可用颜色(blue),而Q还剩两种(red、blue)。 - 这时先给可用选项更少的
SA赋值更好。
- 如果
- 通用规则:选可行值最少的变量(又称“最少剩余值”启发式,MRV)。
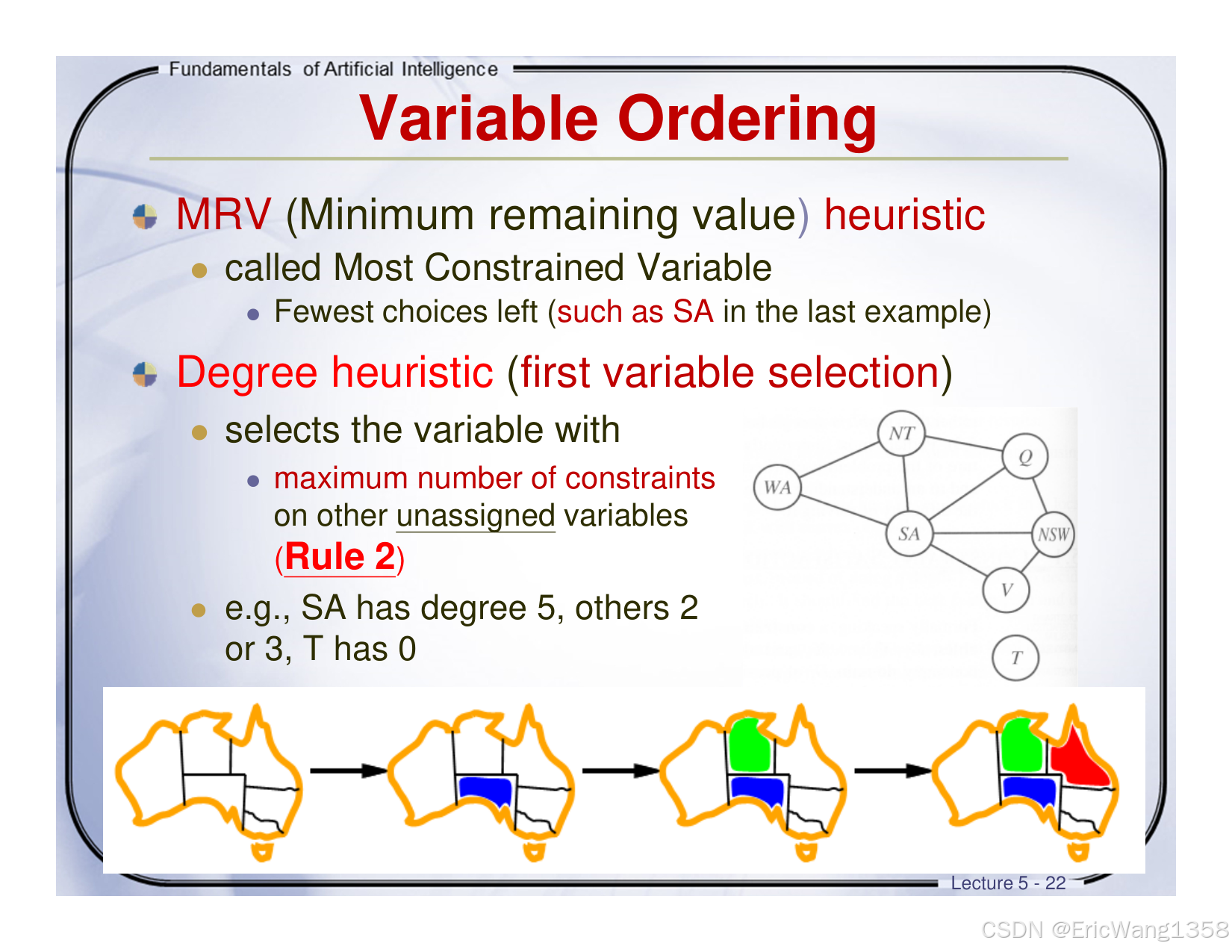
幻灯片 22:“变量选择顺序”(二)
- MRV(Minimum Remaining Value)启发式:
- 又称“最受限变量”。
- 每次优先选剩余可用值最少的变量。
- Degree启发式:
- 如果是第一个要赋值的变量,就选与其他未赋值变量拥有最多约束关系的变量。
- 在澳大利亚地图中,
SA与 5 个邻居相连,所以它是度数最高的节点。
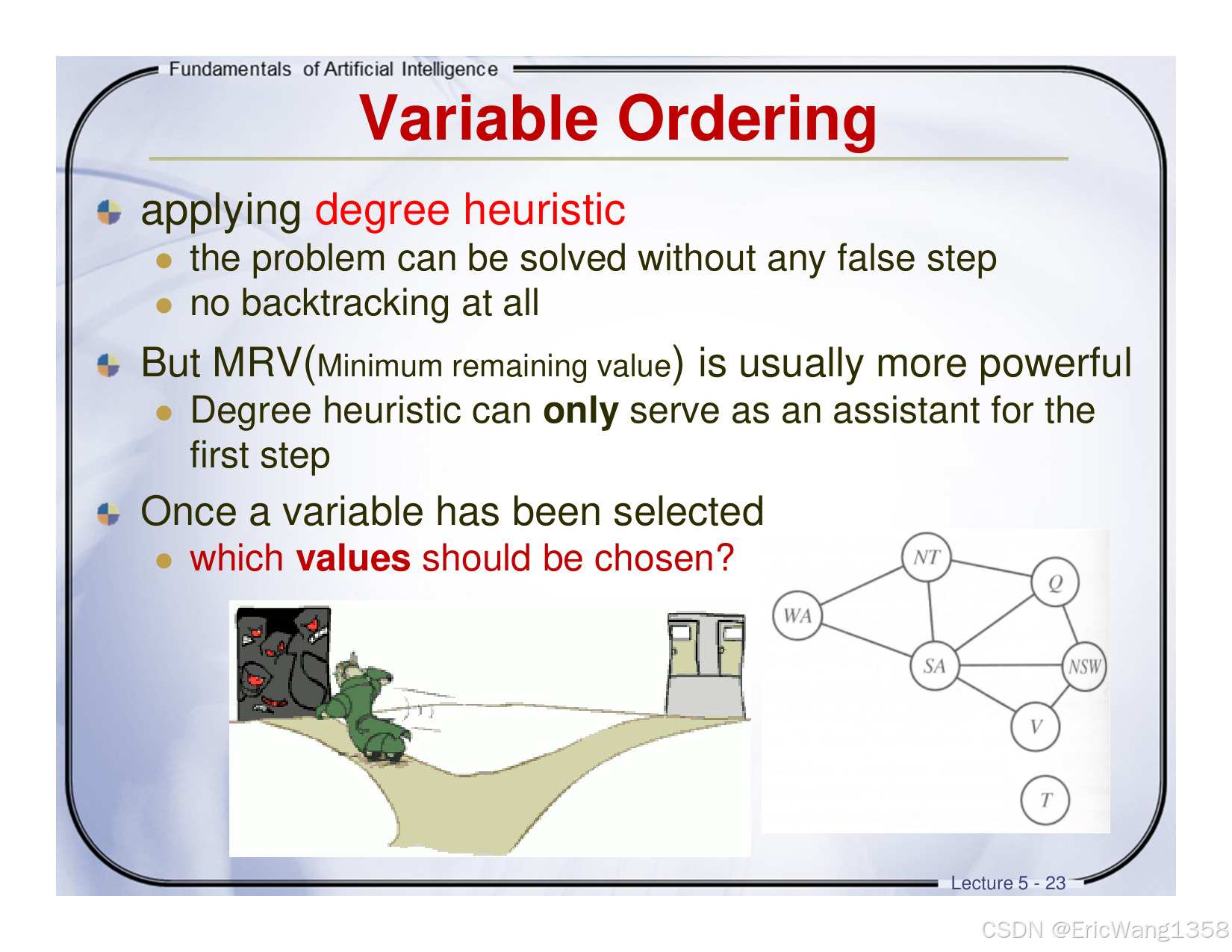
幻灯片 23:“变量选择顺序”(三)
- Degree启发式的效果:
- 有时先选度数最高的变量能大幅减少回溯次数。
- MRV vs. Degree:
- MRV整体更通用,但Degree在某些情况下也可作为辅助或首要选择。
- 选好变量之后:下一个问题是给它分配什么值。
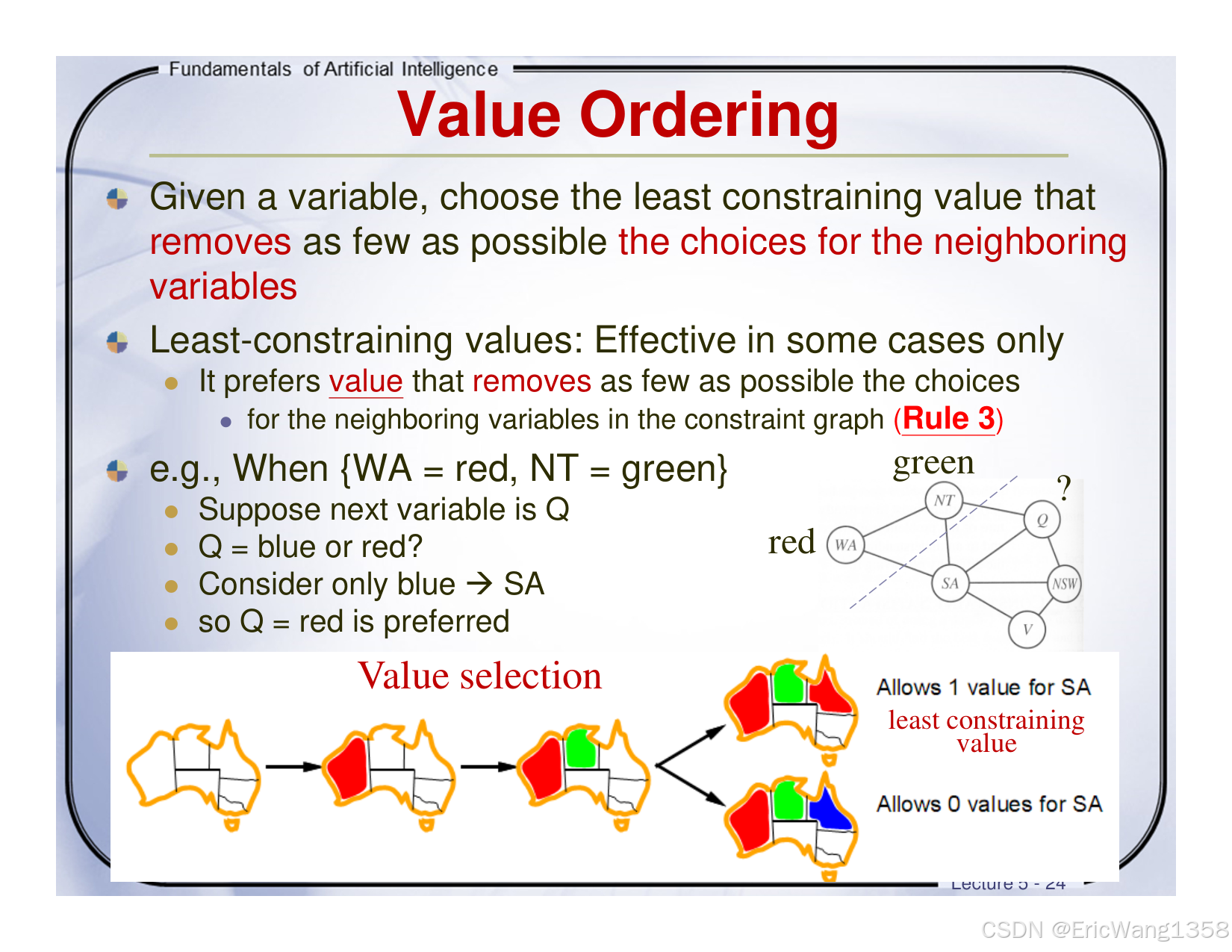
幻灯片 24:“值的选择顺序”
- Least Constraining Value(LCV):
- 在选定要赋值的变量后,选择一个对其他未赋值变量约束最少的值。
- 即:赋值后尽量保留更多可选项给其他变量。
- 操作准则:
- 先选对邻接变量限制最少的值。
- 示例:
Q可以是red或blue,若选red能让SA保留更多选择,就优先选red。
总体思路
以上内容说明在CSP中,最基础的“回溯搜索”可以通过一系列“启发式”增强来显著减少搜索成本,包括:
- 变量选择次序:MRV(最少剩余值)& Degree(最高度)
- 值选择次序:LCV(最少约束值)
- 前向检查或冲突检测等方法
这些技巧旨在减少搜索分支数并尽早发现冲突,从而加速约束满足问题的求解过程。
CSP中的搜索策略与启发式优化
(Search Strategies & Heuristic Optimization in CSP)
1. 无信息搜索 vs 启发式搜索 | Uninformed vs Informed Search
技术定义
- 无信息搜索 (Uninformed Search): 系统性地遍历解空间,不使用特定启发式规则。
例如:暴力回溯(Backtracking)尝试所有可能路径,直到找到解或穷尽所有选项。 - 启发式搜索 (Informed Search): 利用问题特定或通用启发式规则,高效引导搜索方向。
例如:优先处理“最受约束的变量”(MRV),减少无效分支。
通俗解释
- 无信息搜索:就像在迷宫中闭着眼睛摸墙走,遇到死胡同就原路返回。
- 启发式搜索:拿着迷宫地图和指南针,优先探索最可能通向出口的路径。
设计者初衷
- 目标:避免暴力搜索的指数级复杂度(如3n)。
- 灵感来源:人类解决复杂问题时的直觉(如填色时优先处理邻国最多的州)。
2. 回溯搜索(Backtracking Search)
技术定义
- 增量式算法 (Incremental CSP Algorithms): 逐层生成搜索树,每层仅为一个变量赋值。
例如:先为WA赋红色,再为NT赋绿色,依此类推。 - 交换性赋值 (Commutative Assignments): 变量赋值顺序不影响最终解。
例如:先WA=红后NT=绿,等价于先NT=绿后WA=红。 - 深度优先搜索 (DFS): 单变量赋值的DFS称为回溯搜索(Backtracking Search)。
通俗解释
- 回溯搜索:像搭积木一样逐块放置,如果发现当前块放错,就拆掉重试。
例如:数独中填入数字,若冲突则擦掉并尝试下一个数字。
设计者初衷
- 核心需求:避免存储所有中间状态,节省内存。
- 权衡取舍:牺牲部分时间效率(回溯次数多),换取空间效率(仅需维护当前路径)。
3. 启发式优化:变量排序 | Heuristic Optimization: Variable Ordering
技术定义
- 最少剩余值(MRV)启发式: 选择剩余可选值最少的变量(最受约束变量)。
例如:若SA只剩一种颜色可选,优先处理它。 - 度启发式(Degree Heuristic): 选择与最多未赋值变量存在约束的变量。
例如:澳大利亚地图中,SA邻接5个州,优先处理。
通俗解释
- MRV:先填数独中最难填的格子(只剩1个数字可选)。
- 度启发式:先解决影响范围最大的问题(如交通枢纽的调度)。
设计者初衷
- 减少分支因子(Branching Factor):优先处理约束强的变量,降低后续选择复杂度。
- 早期剪枝(Early Pruning):通过快速触发冲突,提前回溯(如SA无合法颜色时立即停止)。
4. 启发式优化:值排序 | Heuristic Optimization: Value Ordering
技术定义
- 最少约束值(Least Constraining Value): 为变量选择对剩余变量限制最少的值。
例如:若Q选红色仅影响1个邻州,而选蓝色影响3个邻州,则优先选红色。
通俗解释
- 最少约束值:填色时选一种颜色,尽量不影响邻居的选择空间。
例如:给Q选红色,让SA还能选绿或蓝;若选蓝色,SA可能只剩红色(导致冲突)。
设计者初衷
- 保留灵活性:避免过早限制其他变量的选项,减少死胡同概率。
- 启发式目标:最大化解的潜在可能性,而非仅满足当前约束。
5. 完全状态公式与局部搜索 | Complete-state Formulation & Local Search
技术定义
- 完全赋值(Complete Assignment): 所有变量均被赋值(可能非法)。
例如:地图着色中所有州已填色,但存在相邻同色。 - 局部搜索(Local Search): 通过微调完全赋值逐步减少冲突。
例如:最小冲突算法(Min-Conflicts)调整冲突变量的值。
通俗解释
- 完全状态:先随便填满所有答案(即使有错误),再慢慢修正。
例如:数独先随机填满所有格子,再调整冲突数字。 - 局部搜索:像校对文章,逐处修正错误直到无错。
设计者初衷
- 应对大规模问题:传统回溯无法处理高维CSP(如百万变量调度),而局部搜索复杂度与冲突数相关。
- 容忍暂时错误:允许中间状态存在冲突,以空间换时间。
6. 设计者蓝图:CSP算法的演进 | Designer’s Blueprint
- 初始挑战:暴力回溯的指数爆炸问题(如3n复杂度)。
- 关键突破:将人类直觉转化为数学启发式(如MRV、度启发式)。
- 技术融合:
- 约束传播(Constraint Propagation): 前向检验(Forward Checking)、弧相容(AC-3)。
- 启发式引导(Heuristic Guidance): 变量与值排序策略。
- 扩展性优化:局部搜索(如Min-Conflicts)应对超大规模CSP。
通俗总结
- CSP算法设计:像制定交通规则——先定义变量(路口)、值域(通行方向)、约束(红绿灯),再通过智能调度(启发式)避免拥堵。
- 核心哲学:用规则(约束)引导混乱(搜索空间),让计算机像人类一样“聪明地试错”。
中英对照结语
- 技术视角: CSP algorithms transform chaotic search spaces into structured logic through variables, domains, and constraints.
- 人文视角: 约束满足问题,是计算机对人类理性思维的数学致敬——用规则驯服无序,以逻辑抵达答案。
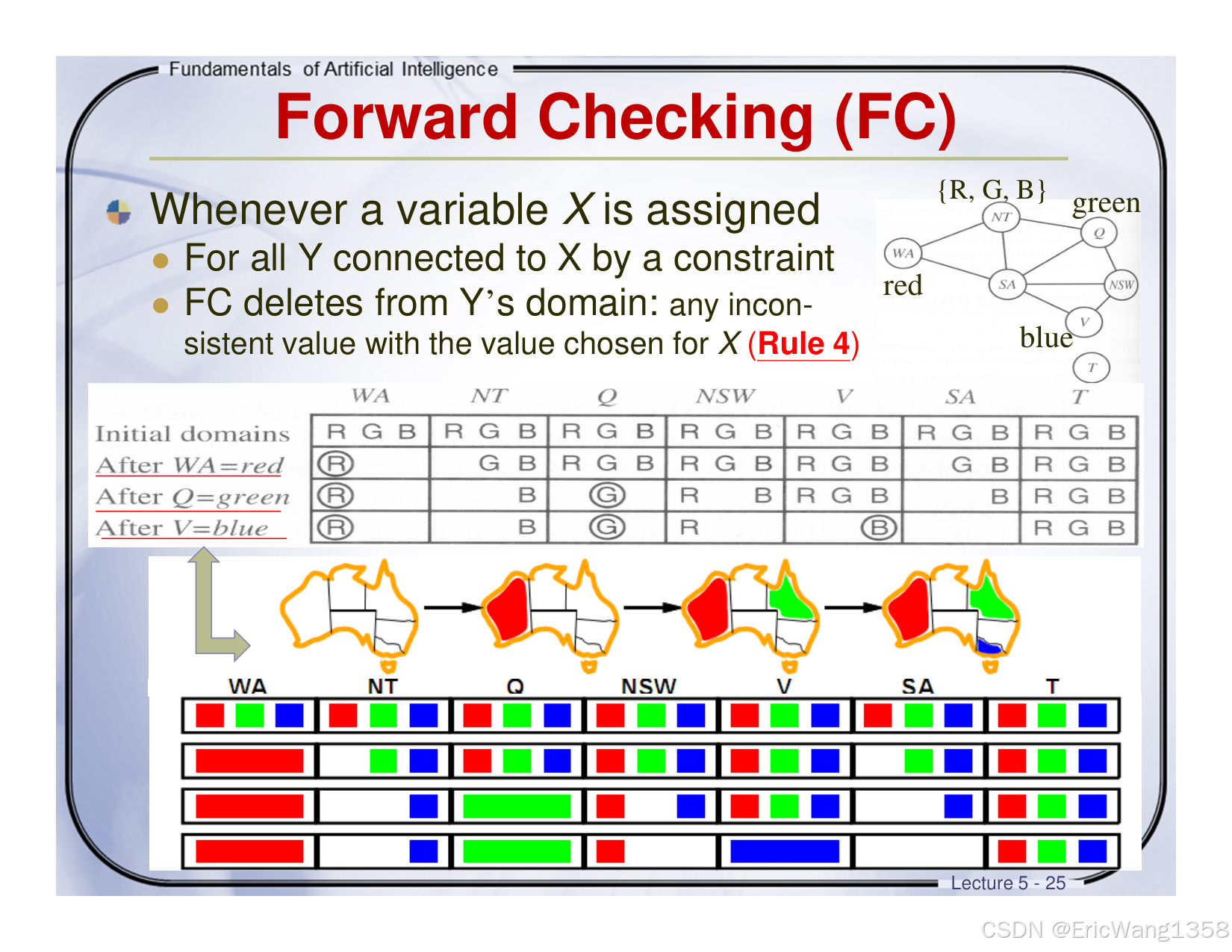
幻灯片 25:Forward Checking (FC) 的基本概念
- 执行时机:一旦变量 XXX 被赋值,就对所有与 XXX 之间存在约束的变量 YYY 更新其可行域(Domain)。
- 原理:从 YYY 的取值域中删除与 XXX 当前赋值不兼容的值,从而减少后续搜索空间。
- 示例:在澳大利亚地图着色中,当
WA=red后,和 WA 相邻的变量(如 NT、SA 等)的域会去除red;若之后Q=green,再相邻的域会继续删除green等。
要点:Forward Checking 有效缩减了合法值的候选列表,使后续决策更明确。
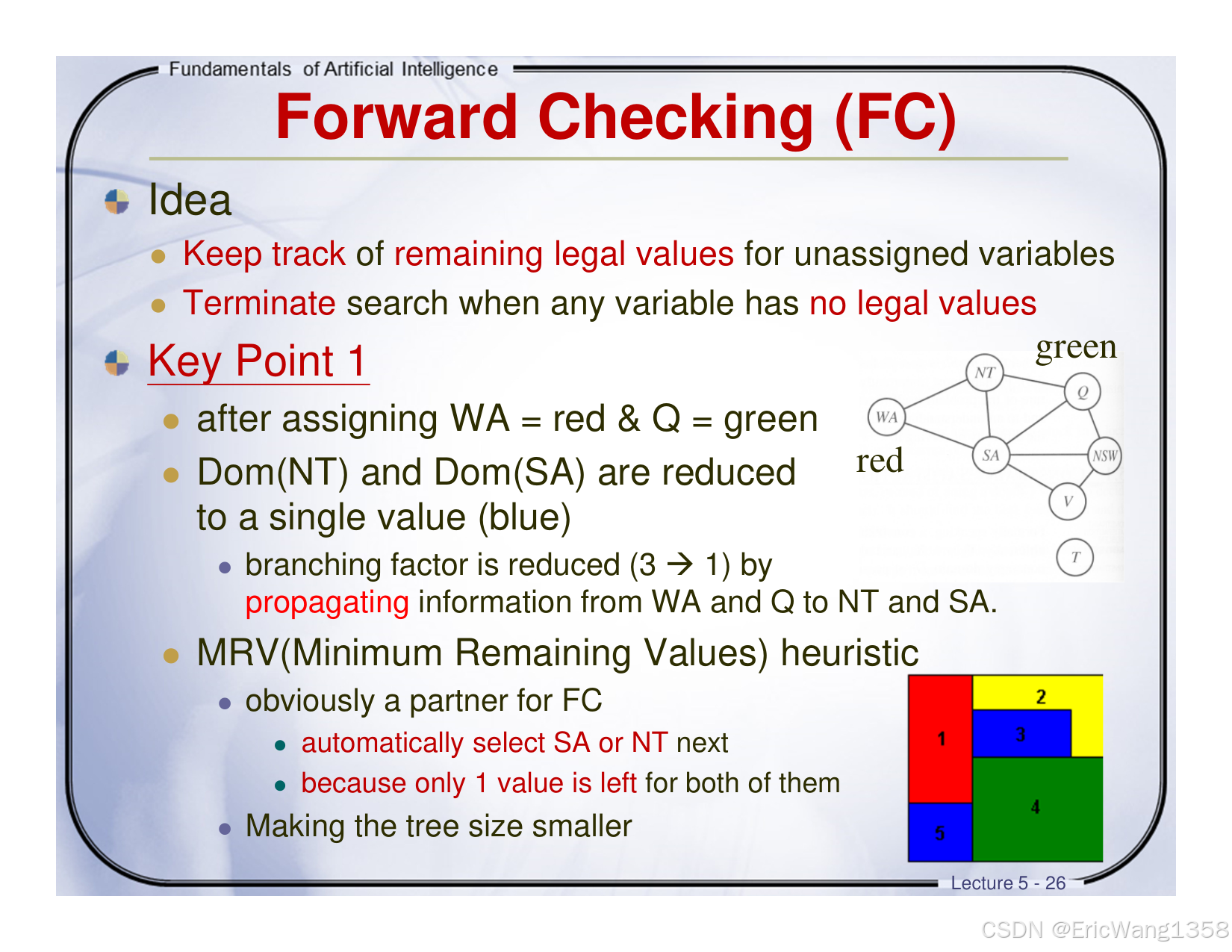
幻灯片 26:Forward Checking (FC) 的关键点
- 核心思路:随时记录未赋值变量的剩余合法取值,一旦有变量出现“无合法值”时,立刻终止并回溯。
- 关键点 1:
- 例如当
WA=red、Q=green时,NT与SA的域可能只剩下一个可用值(blue)。 - 传播(propagating)信息能有效减少分支因子(如从 3 降到 1)。
- 结合 MRV(最少剩余值),会自动提示下一个要赋值的变量。
- 例如当
- 效果:不断缩小搜索树规模,加速求解。
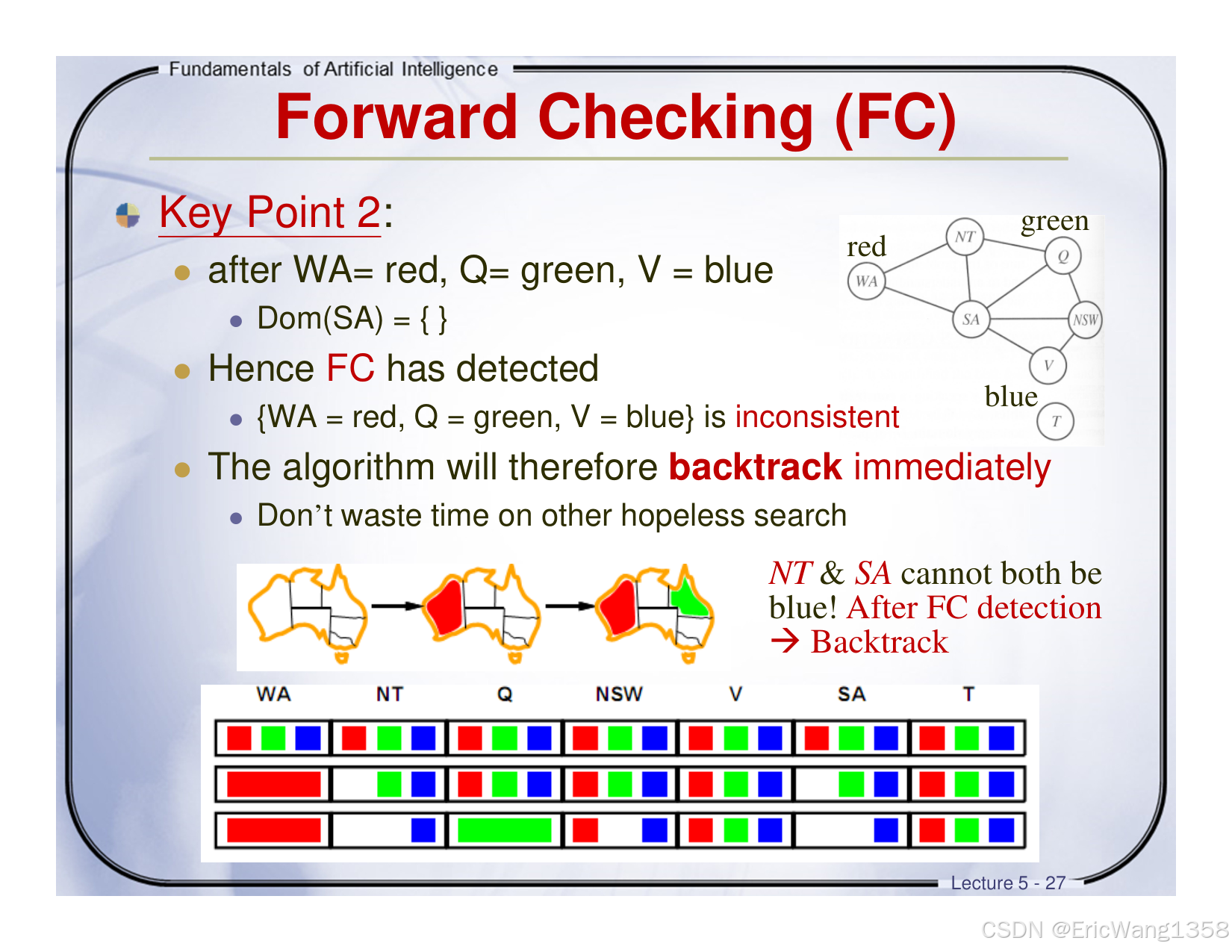
幻灯片 27:Forward Checking (FC) 的关键点(续)
- 关键点 2:
- 如果特定赋值导致某个变量的可行域变为空,就说明该组合不可能满足所有约束。
- 算法在检测到此不一致后会立即回溯,避免在“无解路径”上浪费时间。
- 示例:
WA=red, Q=green, V=blue可能让SA无法取值;FC 很快检测到Dom(SA)={}并回溯。
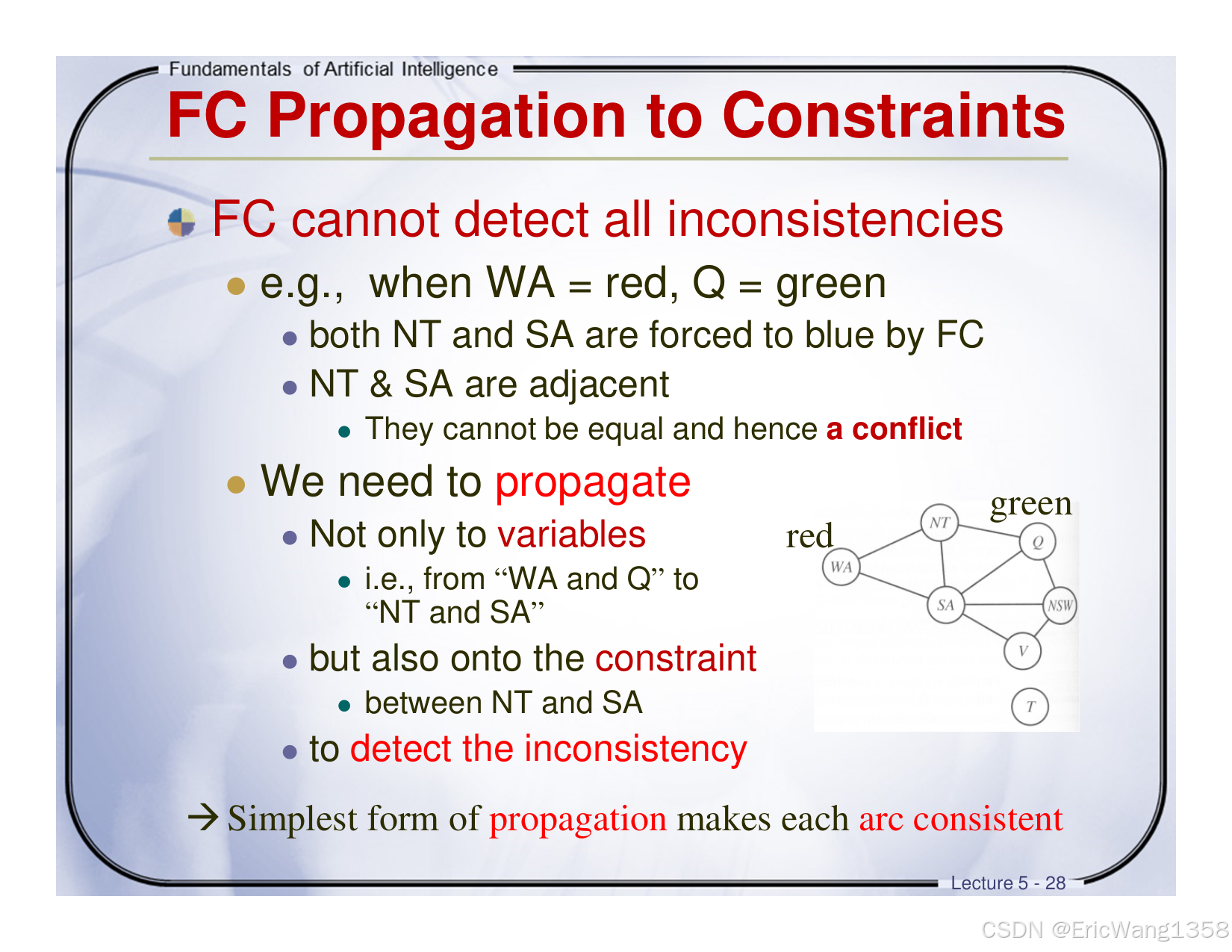
幻灯片 28:FC在约束传播中的局限性
- 问题:Forward Checking 并不能检测到所有类型的不一致。
- 例如,如果
NT和SA同时被迫只能选择同一个值(blue),但它们又彼此相邻,这就冲突了。
- 例如,如果
- 解决思路:需要更进一步的约束传播(constraint propagation),不仅要对变量进行域修剪,还要继续检查变量之间的约束本身是否冲突。
结论:仅通过 FC,仍可能漏掉某些更深层次的冲突,需要更强的传播算法(如“弧一致性”等)。
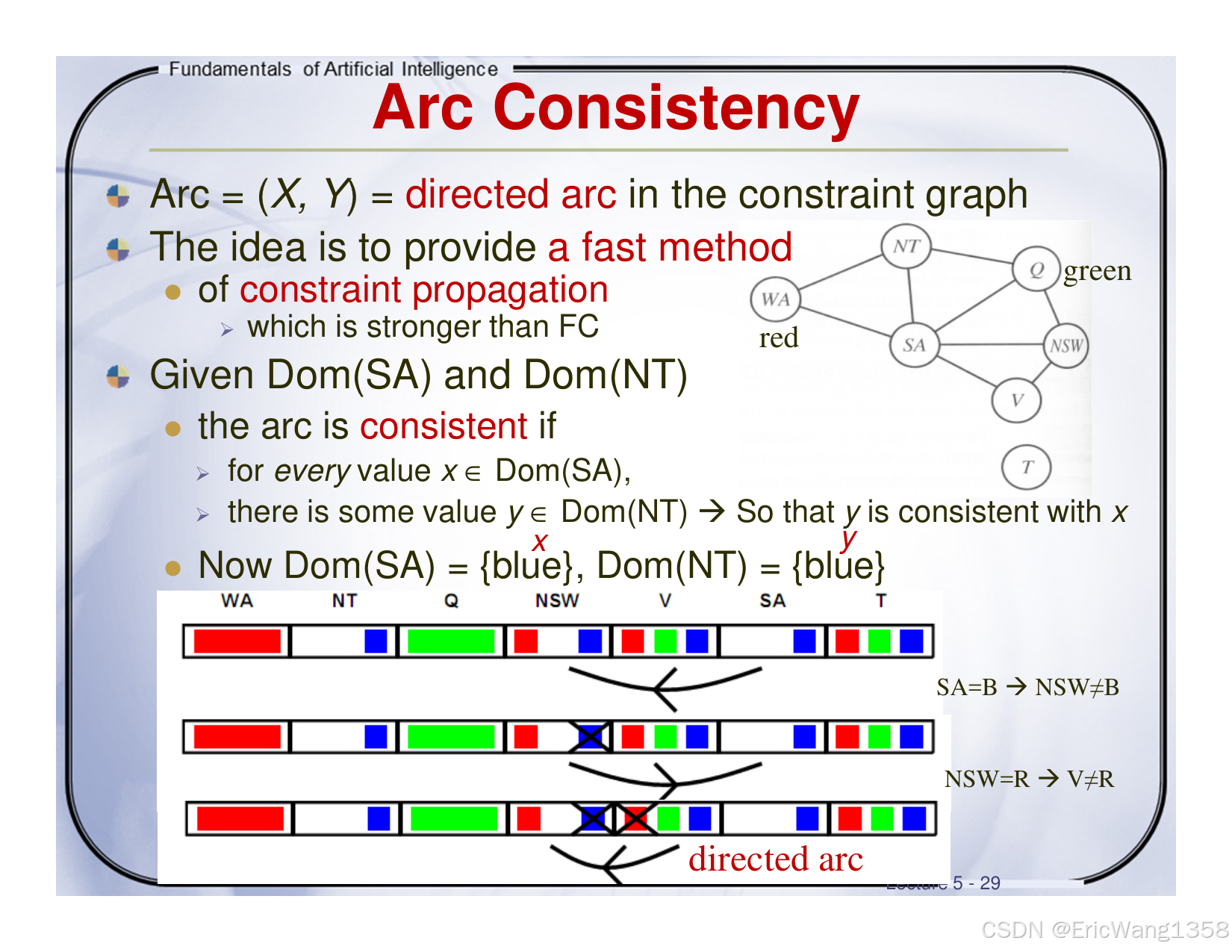
幻灯片 29:Arc Consistency(弧一致性)
- 概念:在约束图中,把一条弧视为有向边(X,Y)。我们希望对每个 x∈Dom(X),都能在 Dom(Y)中找到至少一个 y 与之兼容。
- 作用:比 FC 更强的一种约束传播方法,可在搜索前或搜索过程中减少大量不必要的取值。
- 示例:若
SA与NT都只有{blue},需判断这对邻居是否能共存(若约束是“不相同”,那就冲突了)。
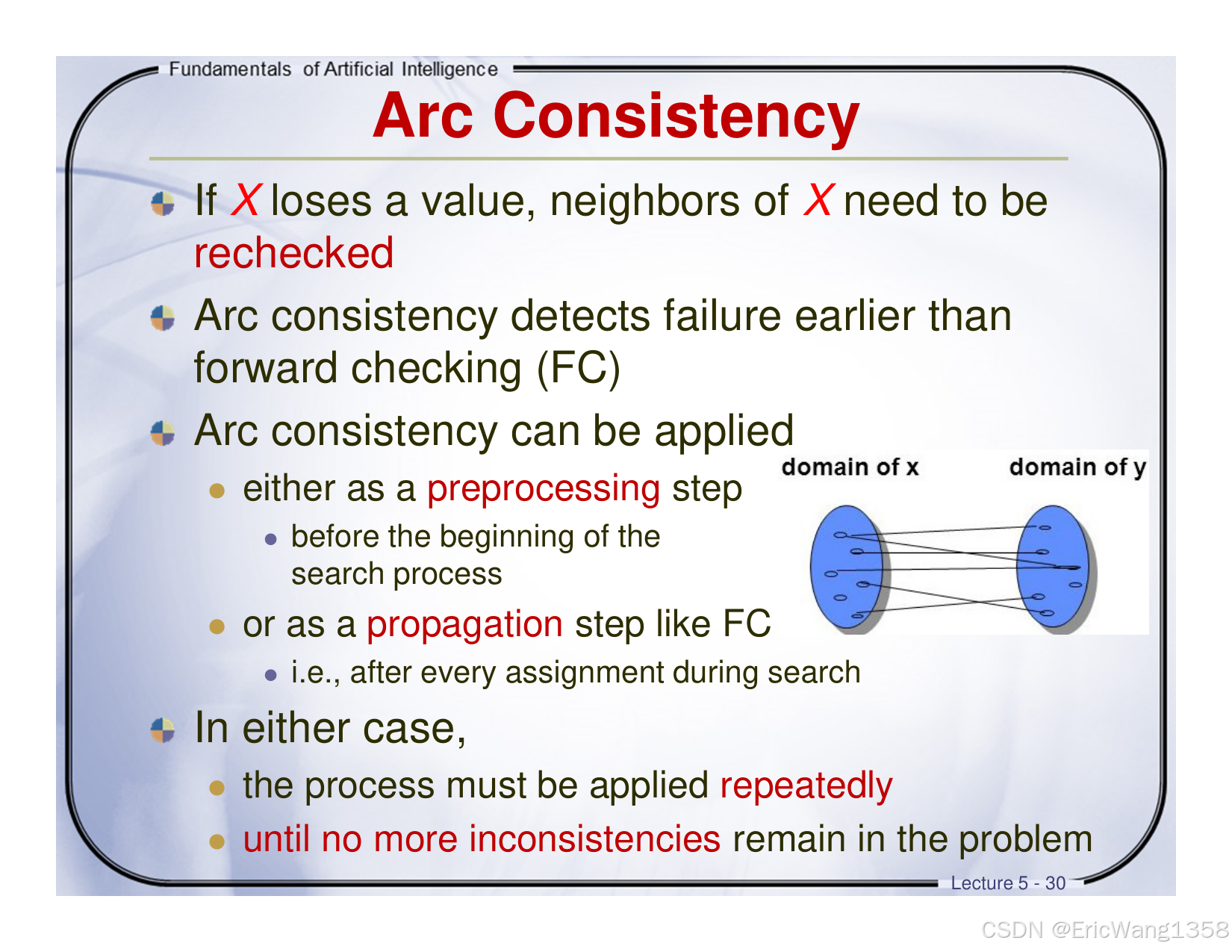
幻灯片 30:Arc Consistency(弧一致性)续
- 流程:若某个变量失去一个可行值,则所有与它相邻的弧都要重新检查(反复更新)。
- 优势:相比 FC,弧一致性能更早发现失败或冲突,提高求解效率。
- 应用方式:
- 预处理:在正式搜索前先做一遍弧一致性,把搜索空间先缩减。
- 动态传播:每次赋值后都做局部更新。
- 终止条件:重复进行,直到没有新的不一致出现为止。
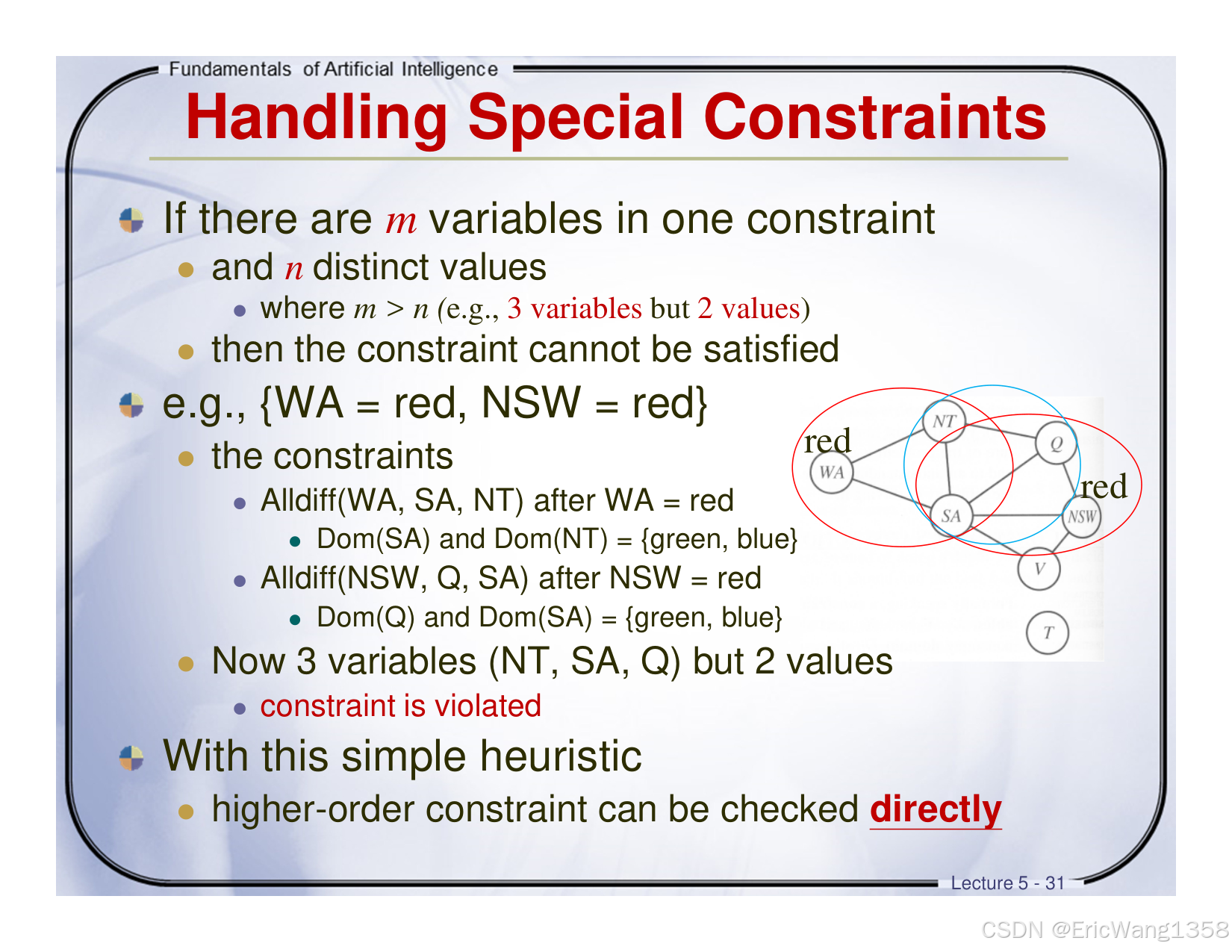
幻灯片 31:处理特殊约束(Handling Special Constraints)
- 场景:如果一个约束里有 m 个变量,但只有 n 个不同可用值,且 m>n,显然无法满足“所有不同”之类的高阶约束。
- 示例:
- 如果
{WA = red, NSW = red},然后有约束Alldiff(WA, SA, NT)和Alldiff(NSW, Q, SA);剩下的 3 个变量却只剩 2 种颜色,就一定冲突。
- 如果
- 要点:对于这类高阶约束,可以直接进行更多的解析或特殊判断(如Alldiff),而不必仅依赖二元局部检查。
约束传播的进阶:前向检验、弧一致性与高阶约束
1. 前向检验(Forward Checking, FC)的局限性
问题:FC仅修剪直接相邻变量的值域,无法检测跨变量的深层冲突。
示例:
- 赋值步骤:
- 给WA赋红色 → 相邻的NT、SA不能为红色。
- 接着给NT赋绿色 → 相邻的SA不能为绿色。
- 此时SA的值域可能被修剪为仅剩蓝色。
- 潜在冲突:
- 若SA的邻国Q也被修剪到仅蓝色,而SA和Q相邻,则两者只能选蓝色 → 冲突未被FC检测。
根本原因:
FC仅更新当前变量的邻域,未传播到更远变量。
设计者初衷:牺牲全面性换取效率,适用于简单问题。
2. 弧一致性(Arc Consistency, AC)的升级
定义:对每一条有向弧(X→Y),X的每个值x必须在Y的值域中存在至少一个y,满足X和Y的约束。
示例:
- SA和NT的约束:颜色不同。
- 若SA的值域为{蓝},NT的值域为{蓝} → 无合法y满足SA≠NT → 弧不一致。
流程:
- 预处理:搜索前对所有弧执行AC,缩小值域。
- 动态传播:每次赋值后,重新检查相关弧的一致性。
优势:
- 更早发现冲突:例如SA和NT同时只剩蓝色时,立即报错。
- 减少搜索空间:修剪更多无效值,加速回溯。
对比FC:
| 维度 | 前向检验(FC) | 弧一致性(AC) |
|---|---|---|
| 传播范围 | 仅直接相邻变量 | 所有相关弧的变量对 |
| 检测能力 | 遗漏跨变量冲突 | 检测多级传播的冲突 |
| 计算开销 | 低 | 高(需多次迭代检查) |
3. 处理高阶约束(如Alldiff)
场景:当变量数超过可用值数量时,必然冲突。
示例:
- 约束:Alldiff(WA, SA, NT)(三者颜色不同)。
- 可用颜色:红、绿 → 仅2种,但需3个不同值 → 无解。
解决方法:
- 值域分析:若变量数m > 可用值数n,直接判定无解。
- 特殊约束传播:
- 超弧一致性(Hyper-AC):针对多变量约束(如Alldiff)设计的高级传播。
- 全局约束解析:例如识别Alldiff中的“m > n”情况,提前终止搜索。
设计哲学:
- 普通AC的局限:仅处理二元约束,无法应对多变量逻辑。
- 高阶约束优化:将全局逻辑转化为剪枝规则,避免无谓搜索。
4. 总结:约束传播的层次化策略
- 基础层(FC):快速但粗粒度,适合简单问题。
- 进阶层(AC):全面但耗时,应对复杂约束。
- 高阶层(全局约束):专用逻辑处理,解决特殊场景。
实战建议:
- 小规模问题:优先使用AC预处理。
- 大规模问题:结合FC和动态AC,平衡效率与效果。
- 特殊约束:直接编码全局规则(如Alldiff的m ≤ n检查)。
最终答案:
前向检验(FC)因局部修剪而遗漏跨变量冲突,弧一致性(AC)通过多级传播提前拦截矛盾,而高阶约束需全局逻辑分析。设计者通过层次化策略,逐步逼近问题本质,以智能剪枝取代暴力搜索。
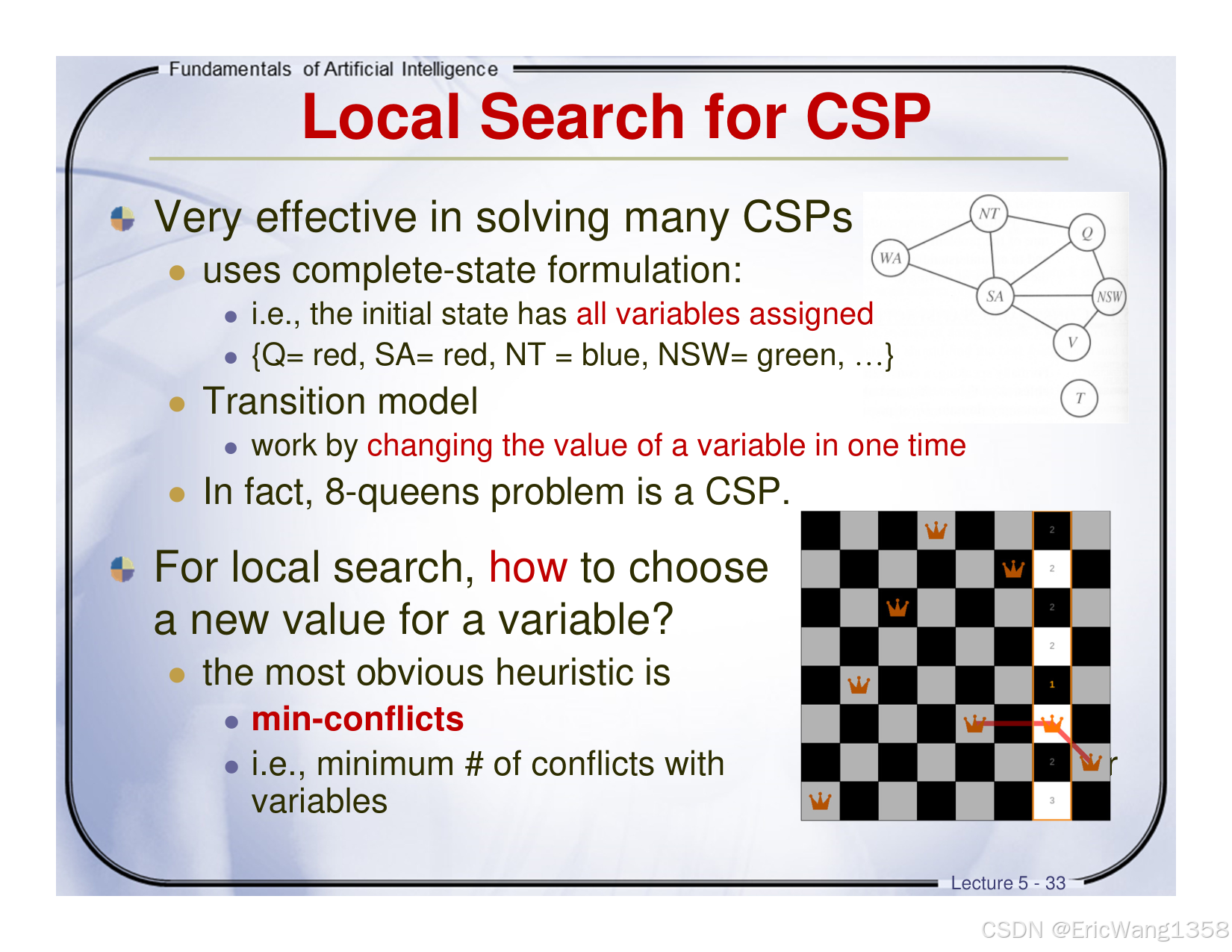
幻灯片 33:Local Search for CSP
-
局部搜索在CSP中的效果:
- 常常能很好地解决很多CSP问题。
- 使用完全状态表述:初始状态中所有变量都有一个赋值(不管是否满足约束)。
- 状态转移模型:通过一次只改变一个变量的值来“移动”到下一个状态。
- 例如:8皇后问题就是典型的CSP。
-
核心问题:在局部搜索中,如果要重新给某个变量赋值,应当怎样选这个值?
- 最常见的启发式是 min-conflicts(最小冲突策略)。
- 意思:选使与其他变量冲突数最少的那个值。
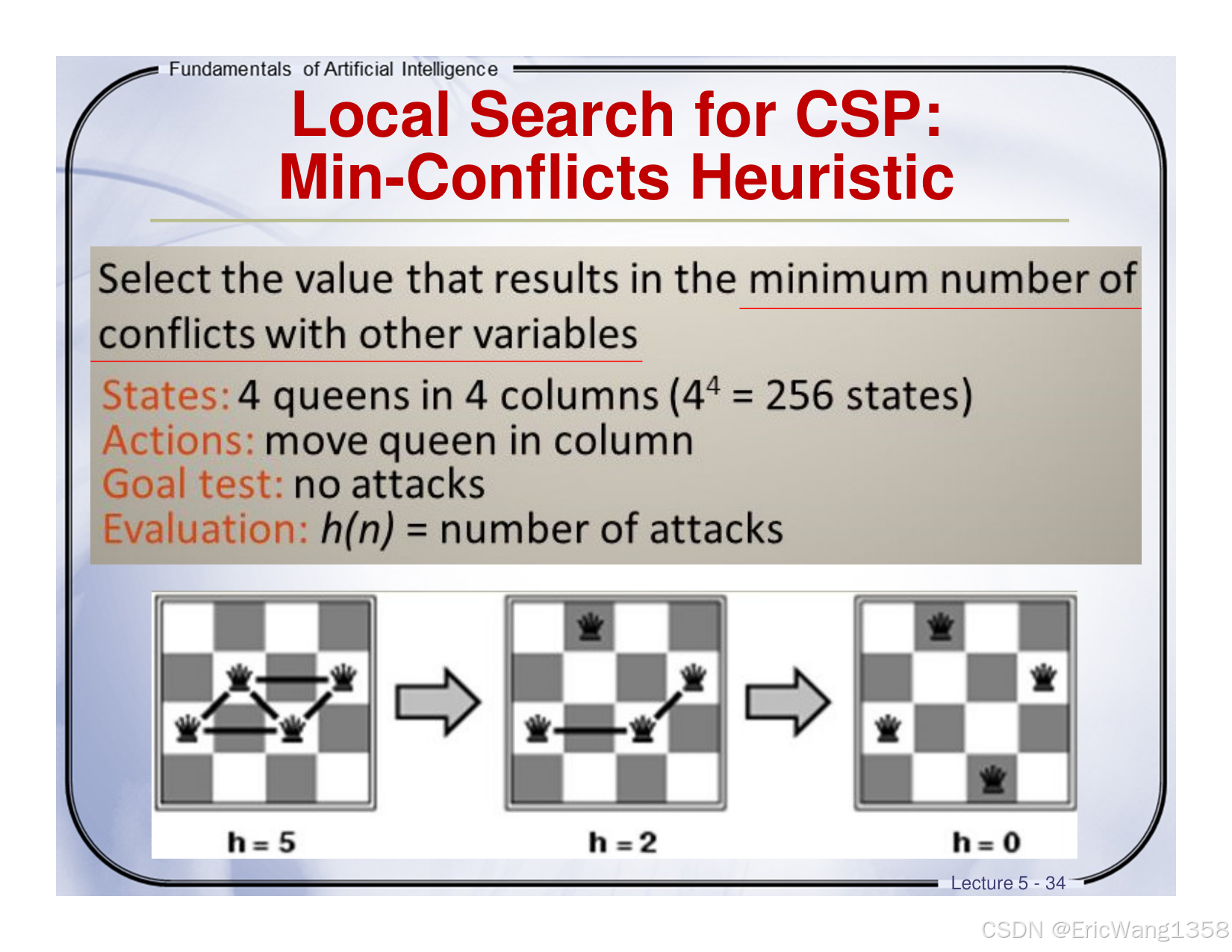
幻灯片 34:Local Search for CSP——Min-Conflicts 启发式
- 基本原理:
- 在当前状态中,针对任意一个出现冲突(违规)的变量,尝试为它重新选择一个值。
- 这个新值应当能最小化它与其它变量之间的冲突数。
- 示例:
- 以4皇后问题为例,每个状态是4列皇后的位置组合,共有 44=2564^4 = 25644=256 种。
- 目标测试:没有皇后互相攻击。
- 代价函数 h(n):冲突(攻击)数。
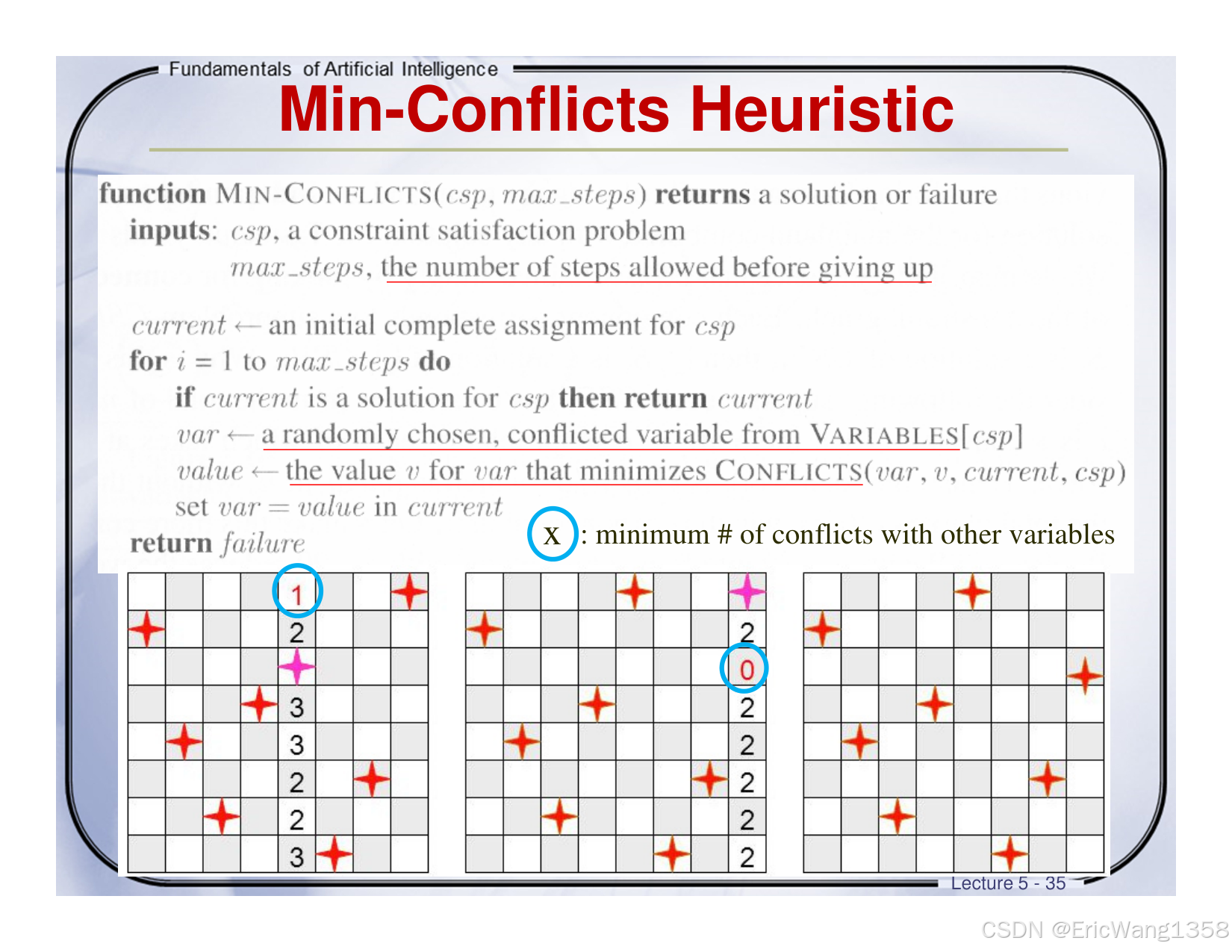
幻灯片 35:Min-Conflicts Heuristic(伪代码与示例)
- Min-Conflicts算法框架:
- 从一个完整赋值开始(可能有冲突)。
- 若当前赋值已满足所有约束,则返回这个解。
- 否则,从有冲突的变量中随机挑一个。
- 选择一个令冲突数最小的值赋给该变量。
- 重复以上过程,直到找到解或到达最大迭代步数。
- 示例:
- 棋盘中每一列放一个皇后,通过不断修改相冲突列中的皇后行位置,直到冲突数减到0。
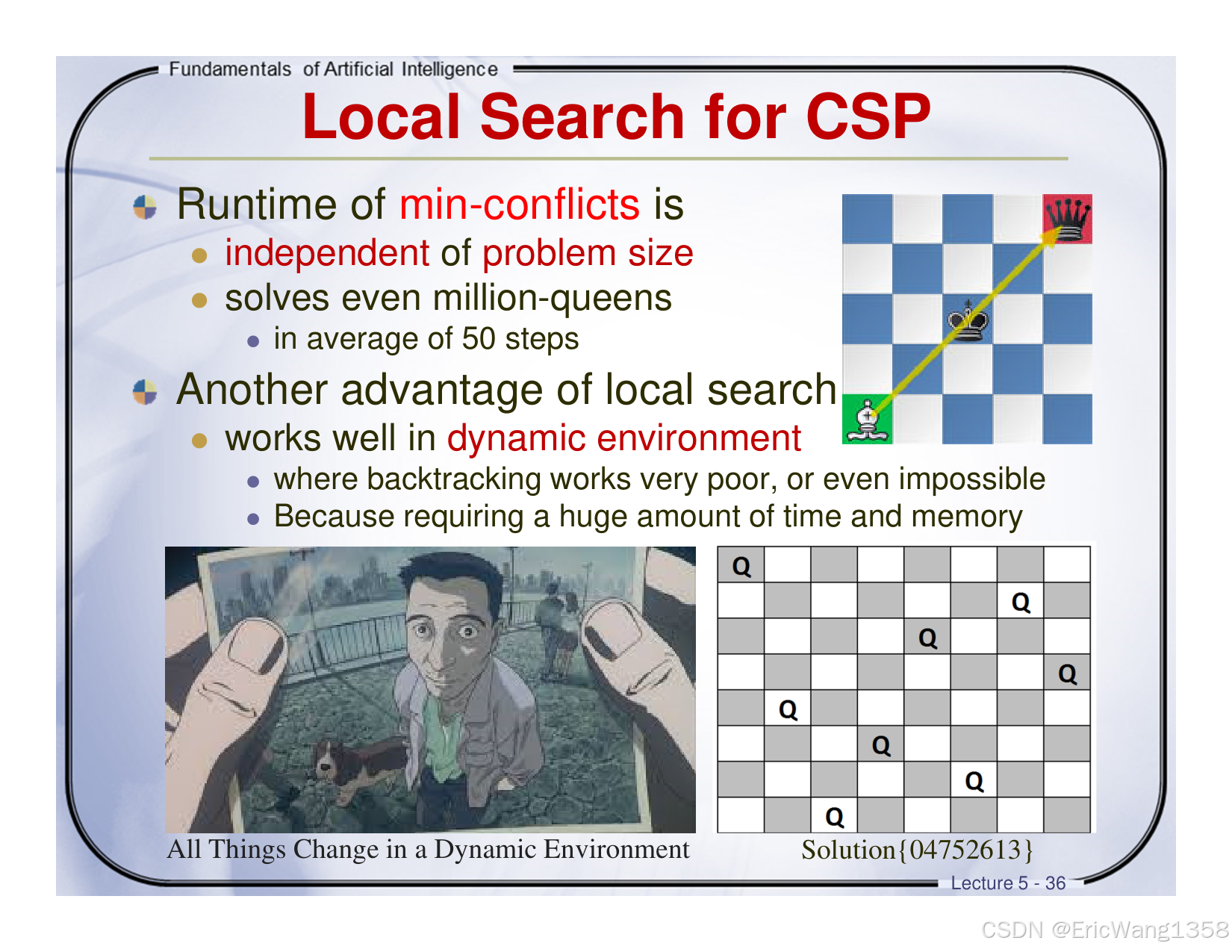
幻灯片 36:Local Search for CSP
- Min-Conflicts的运行时间:
- 经验上“与问题规模无关”或仅弱相关。
- 即使是百万级的皇后问题,也能在平均约50步内找到解(实验结果)。
- 局部搜索的另一个优势:
- 在“动态环境(dynamic environment)”下依旧效果良好。
- 回溯搜索(Backtracking)在环境变化时往往效率低下,需要大量时间和内存。
- 而局部搜索能快速在当前完整赋值的基础上小步迭代,适应环境变化。
总结:Min-Conflicts 的核心思想
- 从一个初始完整状态开始,每次只修改有冲突的变量使其冲突最小化,并进行迭代。
- 对大规模CSP非常有效,尤其适用于8皇后或更大规模的皇后问题,也能灵活应对环境动态变化。
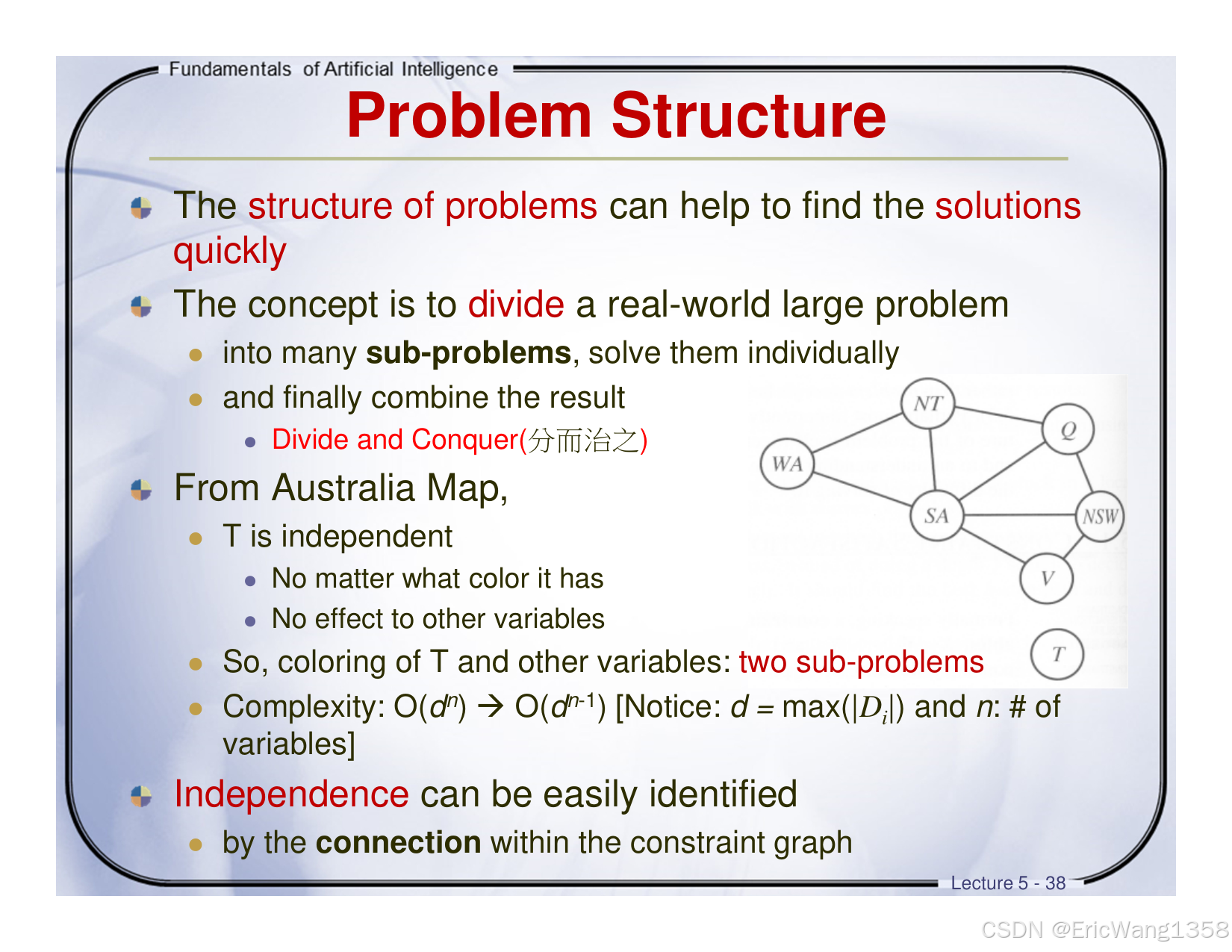
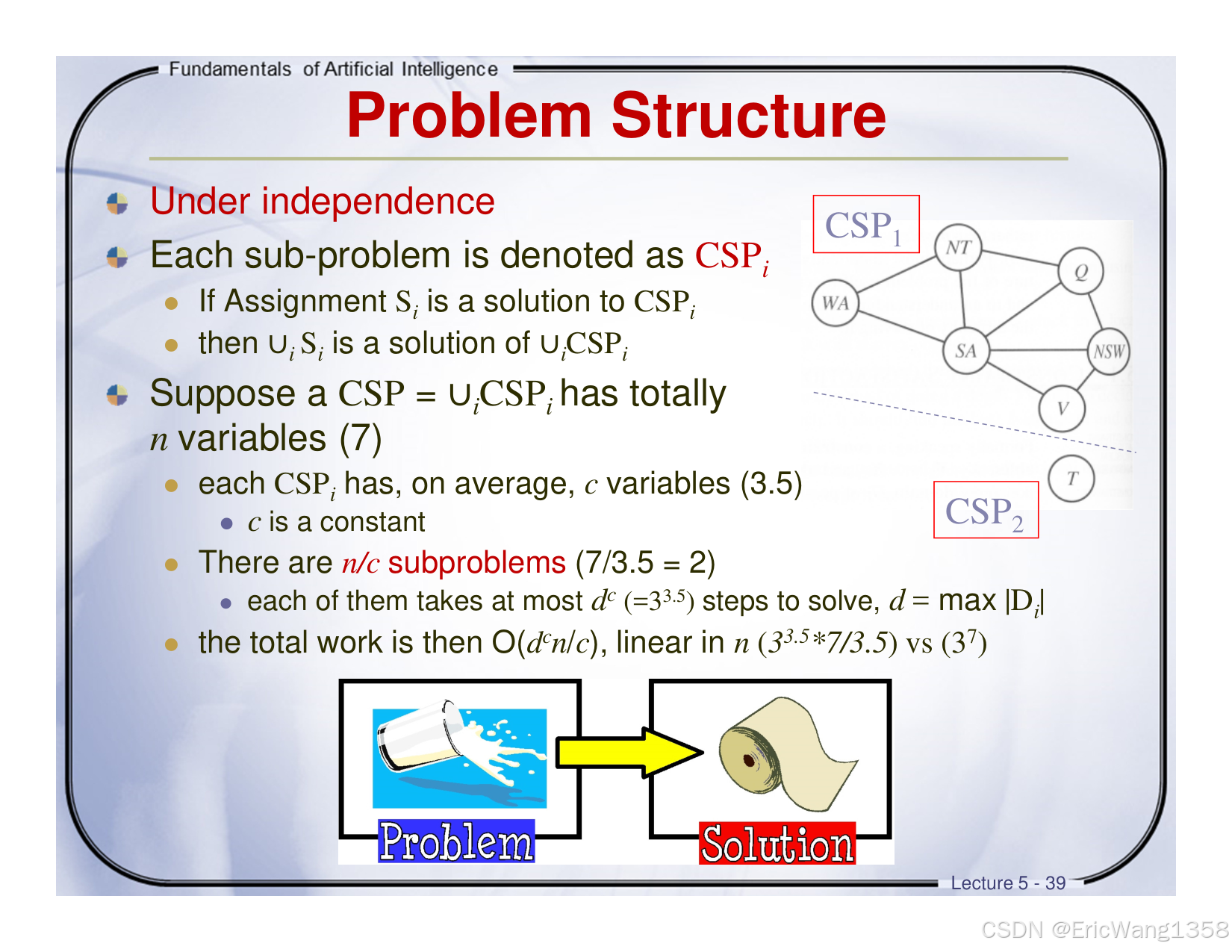
幻灯片 38:Problem Structure(从澳大利亚地图示例看“独立性”)
- 问题结构有助于快速求解:
- 如果大问题可分解成相互独立的子问题,分别求解后再合并。
- “Divide and Conquer”思想:
- 把实际大问题切分成子问题,单独处理,再组合结果。
- 示例:澳大利亚地图
- 区域 T(塔斯马尼亚)与其他地区没有交互约束,相当于一个独立的子问题。
- 原本是 O(d^n) 的复杂度,但把 T 单独分出去后,就变成两部分,各自的规模更小,搜索复杂度大幅下降。
- 独立性识别:
- 可以从约束图中观察哪些节点(变量)与其他部分没有直接或传递性关联。
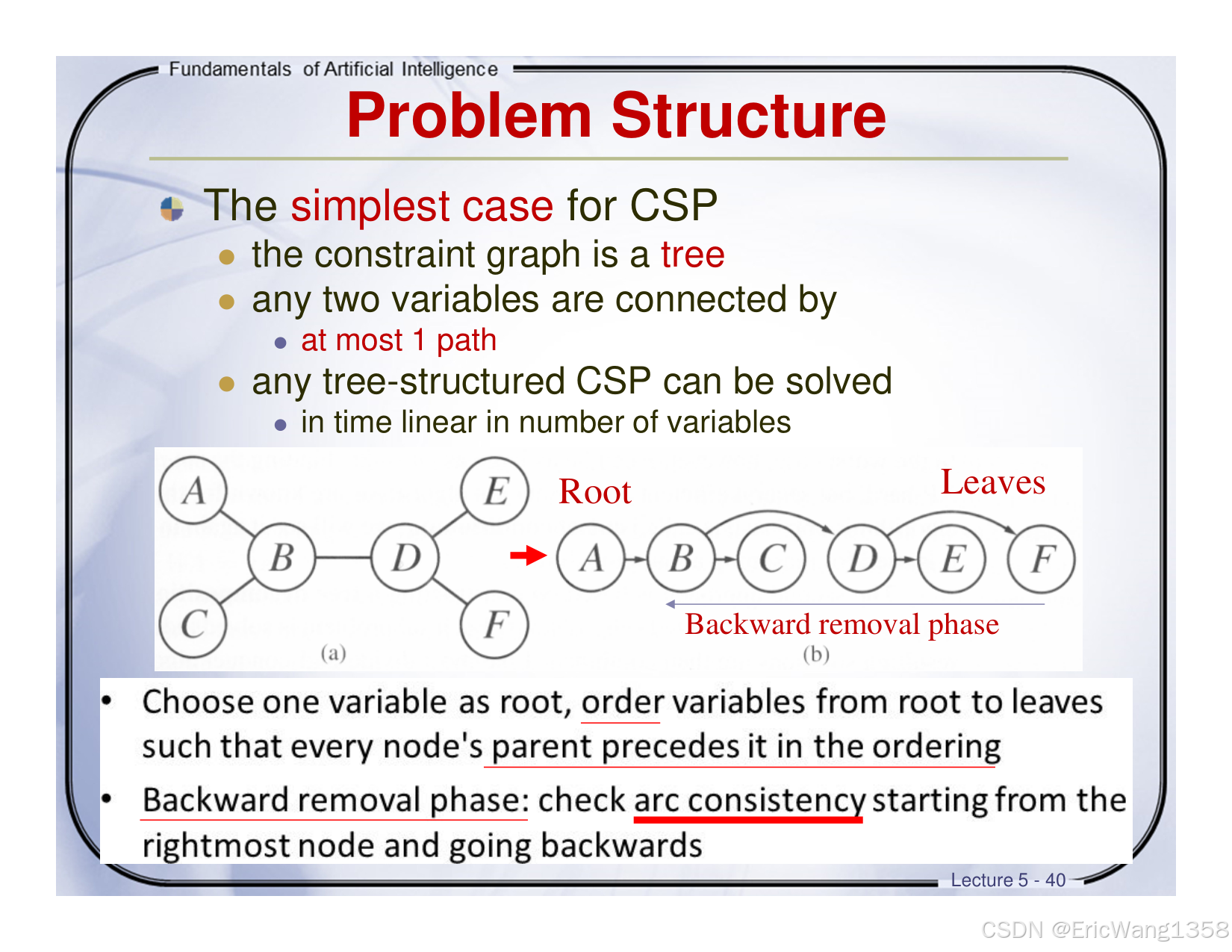
幻灯片 40:最简单情况:树形结构的CSP
- 树形CSP:
- 若约束图是一棵树,则任意两变量之间最多只有一条路径。
- 这种CSP可在线性时间(随变量数呈线性增长)内求解。
- 解决思路:
- 选任意变量作为根(root)。
- 从根到叶子按顺序进行“回退”检查(backward removal),验证并修剪不满足约束的取值。
- 结果:树状CSP极易求解,因为无环结构,减少了大量重复检查。
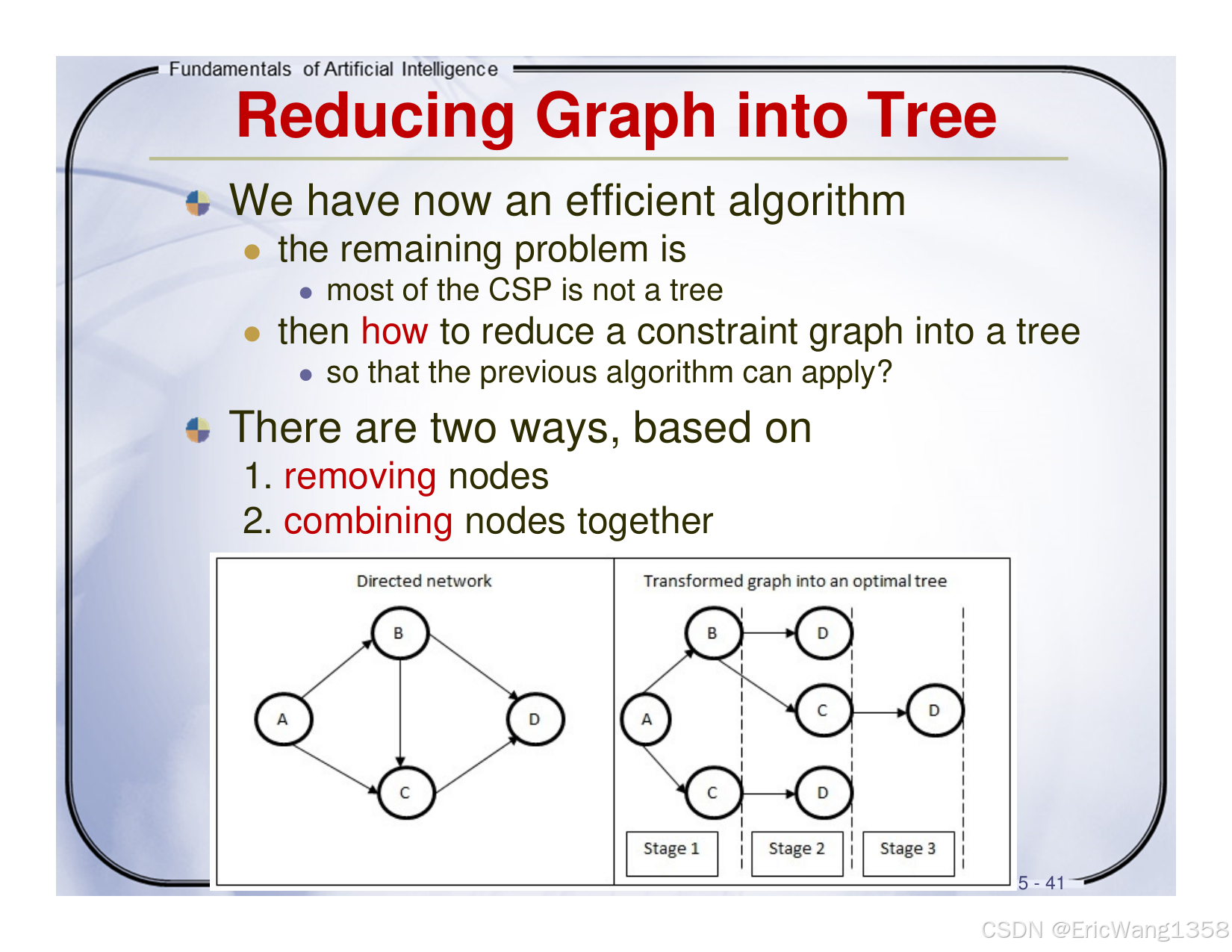
幻灯片 41:把一般图转换为树形的思路(Reducing Graph into Tree)
- 背景:我们有处理树形CSP的高效算法,但实际CSP通常图中有环,不是树。
- 问题:如何将带环的约束图转化为树形,使得已有算法可以应用?
- 两种方法:
- Removing nodes(删除节点):可能意味着用“节点一致化”等技巧来简化图。
- Combining nodes(合并节点):将某些相关节点打包成一个“超级节点”,从而减少环、形成树形结构。
- 意义:通过这两类操作,我们可将一般的CSP图转化为“接近树”或“树分解”形式,以便在该结构上用线性算法处理。
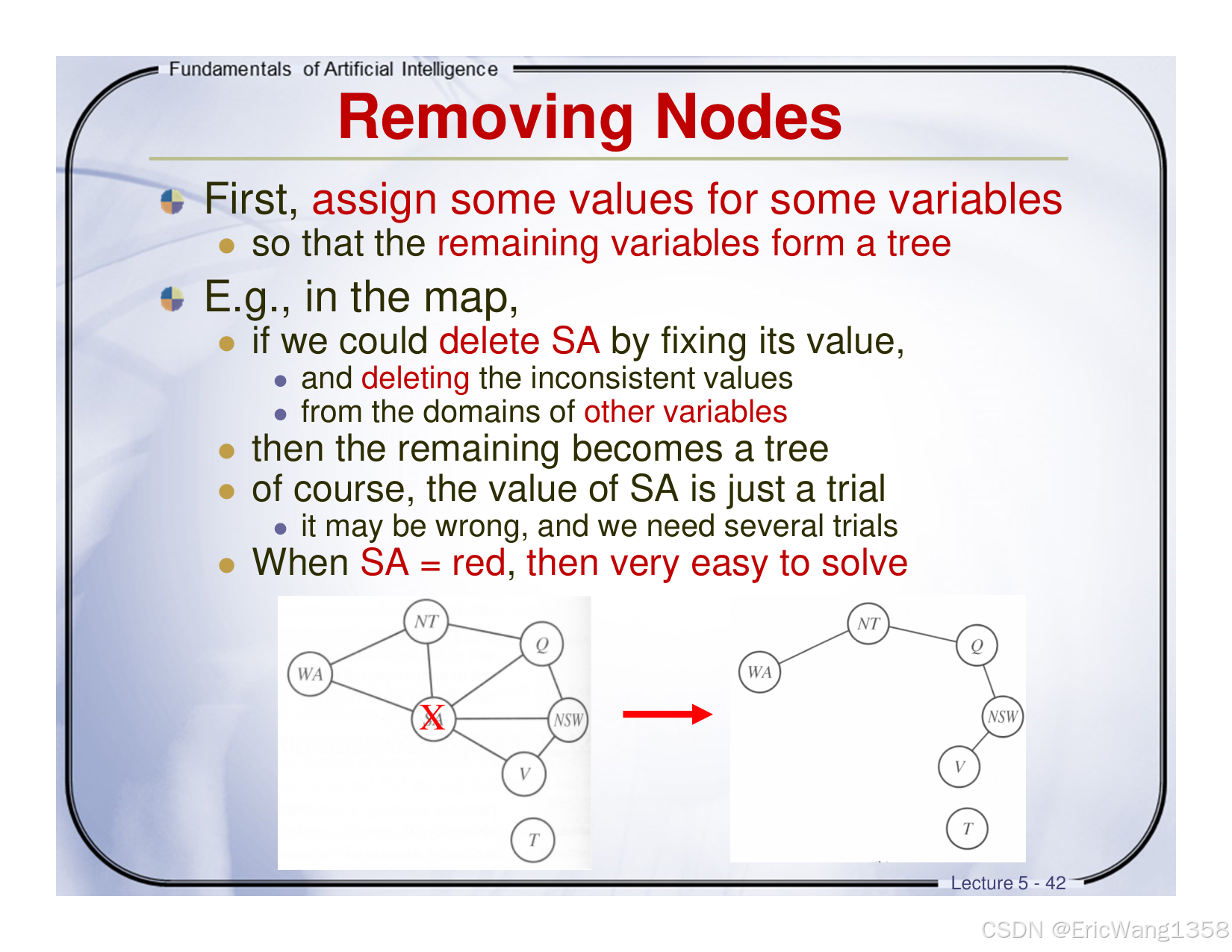
幻灯片 42:Removing Nodes(移除节点)
- 思路:先为某些变量临时分配取值,以便剩余未赋值的变量在约束图中形成一棵“树”结构。
- 示例:在澳大利亚地图中,如果先把
SA固定为red,并同步删除不兼容取值(如邻接区域不能再选red),剩余的变量(WA, NT, Q, NSW, V, T)就构成一个树型图。- 这时,就可以使用高效的树形CSP求解算法去处理剩余变量。
- 注意:对
SA的赋值只是一种试探,若最终发现冲突,需要回溯并尝试其它取值。
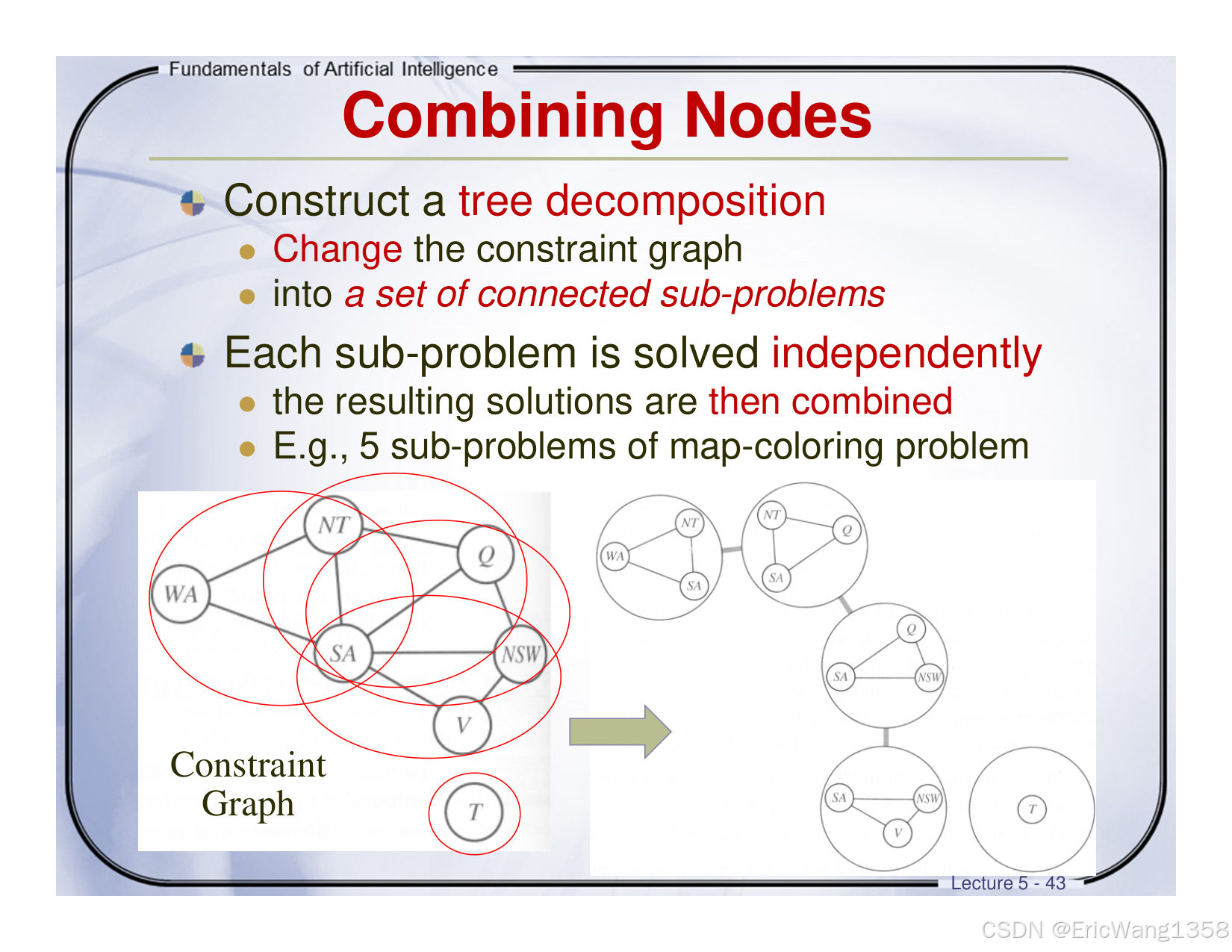
幻灯片 43:Combining Nodes(合并节点)
- 构造Tree Decomposition(树分解):
- 将原始约束图转化为一组“相互连通的子问题”。
- 每个子问题各自求解,然后将它们的解组合起来。
- 举例:
- 澳大利亚地图的着色问题可以分解成 5 个互相关联的子问题,每个子问题只包含部分区域的变量及对应约束。
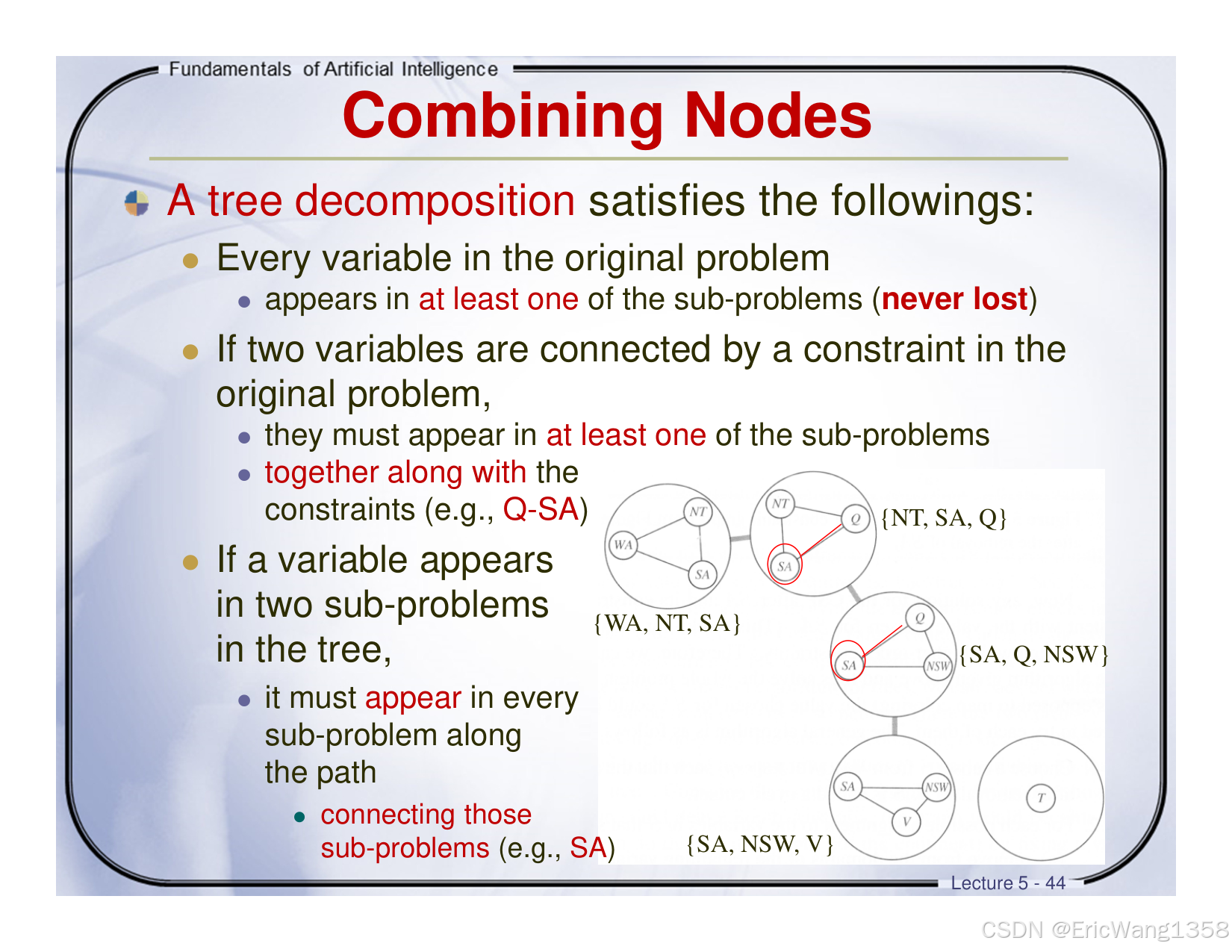
幻灯片 44:Tree Decomposition 的基本条件
-
A tree decomposition必须满足:
- 每个变量在原问题中都至少出现在某个子问题里,不会丢失任何变量。
- 如果两个变量在原问题中有约束(相邻关系),那么它们必须一起出现在至少一个子问题中(包含它们及该约束)。
- 如果某个变量出现在多个子问题里,则该变量必须出现在连接这些子问题路径上的每个子问题中,以保持一致性。
-
示例:
- 在澳大利亚地图上,如
Q与SA有约束,那么在树分解中至少有一个节点包含这二者。
- 在澳大利亚地图上,如
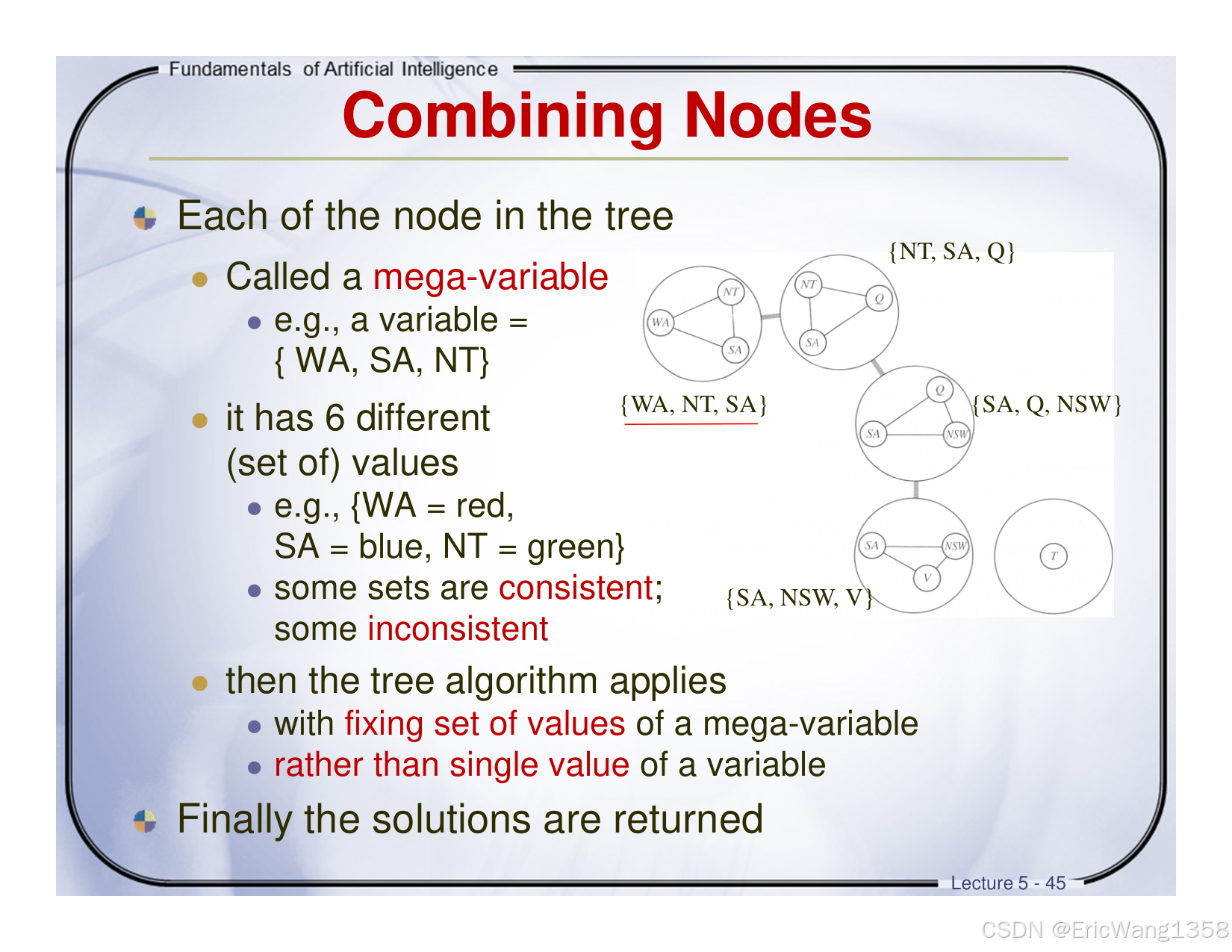
幻灯片 45:Combining Nodes(合并节点)的细节
- “Mega-variable”(超级变量):
- 在树分解中,每个节点包含一组原变量,例如
{WA, SA, NT}。 - 这个超级变量的取值域就是这些原变量的所有可能联合赋值,部分组合可能满足约束,部分则不满足。
- 在树分解中,每个节点包含一组原变量,例如
- 应用方式:
- 把树分解中的每个节点视作一个超级变量,然后用“树形CSP算法”来为这些超级变量选取合适的“集合赋值”。
- 最终结果:
- 当所有超级变量的取值都和相邻节点保持一致,就得到原问题的整体解。
为什么树形CSP可以在线性时间内求解?
1. 树形结构的核心优势:无环约束传播
树形CSP的约束图是一棵无向无环图(即树),任意两个变量之间只有一条唯一路径。这种结构消除了环路导致的重复约束冲突,使得约束传播可以单向进行,无需回溯或重复检查。
示例:
假设一个树形CSP有5个变量(A→B→C→D→E),约束为相邻变量值不同:
- 根节点A赋值后,B的值域自动修剪(排除A的值)。
- B赋值后,C的值域修剪,依此类推。
- 无环路 → 每个变量的值域修剪仅受父节点影响,不会循环依赖其他分支。
2. 线性时间求解的关键步骤
树形CSP的求解算法(如拓扑排序 + 前向检验)分为两步:
- 拓扑排序:从根节点到叶子节点确定处理顺序(如A→B→C→D→E)。
- 前向修剪:按顺序依次为每个变量赋值,并修剪子节点的值域。
时间复杂度分析:
- 拓扑排序:O(n),通过一次深度优先遍历实现。
- 前向修剪:每个变量与其父节点和子节点交互,每次操作为O(1)。
- 总时间:O(n) + O(n) = O(n)(线性复杂度)。
3. 对比普通图结构CSP的指数级复杂度
普通图结构的CSP可能存在环路(如A→B→C→A),导致:
- 约束传播循环:A的值影响B,B影响C,C又影响A,需多次迭代才能稳定。
- 回溯爆炸:可能需遍历指数级数量的路径(如O(d^n),d为值域大小)。
树形CSP的降维打击:
无环结构将指数级复杂度降为线性,因每一步仅需处理父节点的单一约束。
4. 为何“感觉错误解需要O(n)时间”是误解?
用户可能的混淆点在于:
- 错误解的判定:在树形CSP中,若某变量无合法值(值域为空),算法会立即终止,无需遍历所有变量。
- 实际流程:
- 若父节点A赋值为红,子节点B的值域自动排除红色。
- 若B的值域为空 → 直接判定无解,总时间为O(1)(实际远小于n)。
- 仅当所有变量均有合法值时才需完整遍历,时间为O(n)。
结论:无论是否有解,树形CSP的最坏时间复杂度仍为O(n)。
5. 实战案例:树形地图着色
假设一个树形区域(国家A→省B→市C→区D),颜色值域为{红, 绿},约束为相邻区域颜色不同:
- 赋值顺序:A→B→C→D。
- 操作步骤:
- A=红 → B值域为{绿} → B=绿 → C值域为{红} → C=红 → D值域为{绿} → D=绿。
- 结果:合法解,耗时4步(线性于变量数)。
若值域为{红}(仅一种颜色):
- A=红 → B值域为空 → 立即终止,无需处理后续变量,耗时1步。
总结
树形CSP的线性时间复杂度源于其无环结构和单向约束传播特性:
- 无环路:避免重复检查和回溯。
- 拓扑排序:确保每个变量仅依赖父节点,无需全局协调。
- 即时终止:一旦发现冲突立即终止,无需遍历所有变量。
最终答案:
树形CSP的线性时间求解是因其无环结构允许约束单向传播,通过拓扑排序和前向修剪,每一步仅处理一个变量且无需回溯,总步骤数与变量数成严格线性关系。即使存在错误解,算法也能在O(n)时间内完成判定。
逐页中文概括与通俗解析
幻灯片 42:移除节点(Removing Nodes)
核心思想:
- 先固定部分变量,让剩余的约束图变成一棵树,从而利用树形CSP的高效算法。
- 通俗比喻:
- 假设你在拼一幅复杂的拼图,暂时固定其中一块(比如拼图角落),剩下的部分更容易按顺序拼接,避免来回调整。
操作步骤(以澳大利亚地图着色为例):
- 固定关键变量:比如先给SA(南澳)赋值红色。
- 修剪邻域值域:SA的邻接区域(WA、NT、Q等)不能再选红色。
- 剩余结构成树:此时WA、NT、Q等剩余的约束关系变成树形(无环)。
- 快速求解剩余:用树形CSP算法(线性时间)完成其他区域着色。
注意事项:
- 固定SA的赋值可能是试探性的,若后续发现冲突(如邻国无法着色),需回溯并尝试其他颜色。
设计者思路:
- 将复杂图问题转化为树形问题,牺牲部分试探成本,换取整体效率提升。
幻灯片 43:合并节点(Combining Nodes)
核心思想:
- 将多个变量合并为“超级变量”,构造树形分解(Tree Decomposition),分而治之。
- 通俗比喻:
- 把拼图分成几个小模块,先拼好每个模块内部,再按模块之间的接口组合成整体。
操作步骤:
- 划分子问题:将原问题分解为多个子问题,每个子问题包含一组变量及其约束。
例如:将澳大利亚分解为{WA, SA, NT}、{SA, Q}、{Q, NSW}等子问题。 - 构建树结构:子问题之间形成树形连接,避免环路。
- 独立求解子问题:每个子问题单独求解(如确定WA、SA、NT的合法颜色组合)。
- 组合全局解:根据子问题之间的接口约束,合并各子问题的解。
设计者思路:
- 通过分治策略,将复杂问题拆解为简单子问题,降低全局求解复杂度。
幻灯片 44:树分解(Tree Decomposition)的条件
三大条件:
- 覆盖性:原问题的每个变量必须出现在至少一个子问题中。
例如:澳大利亚的每个州必须属于某个子问题。 - 约束完整性:原问题的每条约束必须包含在某个子问题中。
例如:若SA和Q相邻,则必须有一个子问题同时包含SA和Q。 - 路径一致性:若一个变量出现在多个子问题中,这些子问题必须在树分解的路径上连续出现。
例如:若SA出现在子问题A和B中,则A和B之间的路径上的所有子问题都必须包含SA。
通俗解释:
- 条件1:不能漏掉任何变量,否则解不完整。
- 条件2:不能漏掉任何约束,否则组合解时可能冲突。
- 条件3:避免信息断层,确保子问题之间的解能兼容。
设计者思路:
- 通过树分解的结构化规则,保证子问题解的可组合性,避免信息丢失。
幻灯片 45:合并节点的细节——超级变量与树分解
超级变量(Mega-variable):
- 定义:将多个原变量合并为一个超级变量,其值域是这些变量的所有合法组合。
*例如:超级变量{WA, SA, NT}的值域可能是:- WA=红, SA=绿, NT=蓝
- WA=绿, SA=红, NT=蓝
(需满足相邻颜色不同的约束)*
操作流程:
- 为每个超级变量生成候选值:筛选满足内部约束的变量组合。
- 构建树分解结构:超级变量之间形成树形连接。
- 树形CSP求解:按树形结构依次为超级变量赋值,确保相邻超级变量的接口值一致。
示例(澳大利亚地图):
- 超级变量1:{WA, SA, NT} → 值域为所有合法颜色组合。
- 超级变量2:{SA, Q} → 值域为SA和Q的合法组合。
- 树分解连接:超级变量1与超级变量2通过SA的值关联。
设计者思路:
- 通过合并变量减少全局约束的复杂性,利用树形结构的线性优势。
总结:为何需要移除或合并节点?
- 树形结构的天然优势:无环图允许单向传播约束,避免回溯爆炸。
- 分治策略:将复杂图分解为树或近似树结构,分步解决。
- 设计哲学:
- 移除节点:以试探性赋值换取结构简化(类似“先解决关键矛盾”)。
- 合并节点:以空间换时间,通过超级变量减少全局协调成本。
实战意义:
- 地图着色:若原图有环(如澳大利亚包含SA的环路),通过移除SA或合并邻国,转化为树形问题。
- 芯片布线:将复杂电路分解为树状模块,分块优化布线。
通俗总结:
CSP的图结构越简单,求解越高效。移除或合并节点就像“修剪枝叶”或“打包零件”,让计算机能像拼积木一样逐步解决问题,而非面对一团乱麻。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









