







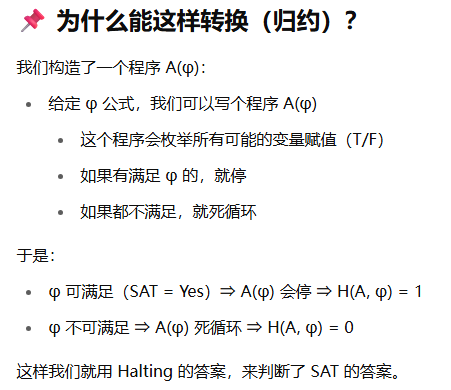
Complexity • Classification of problems: P, EXP, unsolvable • Problems for which we can’t decide yet • Proving hardness of problems • The class NP • The P vs NP question
元宝:以下是计算复杂性理论中核心概念的中英对照解析,结合了复杂度分类、未解问题及核心理论框架:
1. 问题分类 / Classification of Problems
• P类(Polynomial Time)
指在多项式时间内能被确定性图灵机解决的问题(如排序、最短路径)。这类问题的复杂度随输入规模增长可控。
Example: 判断一个数是否为质数(AKS算法属于P类)。
- 图灵机 = 最简单的抽象计算机,能定义“什么是可计算的”。
- 现代计算机是图灵机的物理实现,但受限于有限内存。
- 复杂度理论(P/NP)基于图灵机的计算能力。
• EXP类(Exponential Time)
需指数时间解决的问题(如国际象棋的必胜策略判定)。即使输入规模稍增,计算时间会指数级爆炸。
Example: 广义国际象棋的终局胜负判定是EXPTIME完全问题。
• 不可解问题(Unsolvable Problems)
不存在任何算法能解决的问题(无论时间多长)。例如停机问题(Halting Problem),无法通过程序判断任意程序是否会终止。
-
H 的含义
-
在停机问题的定义中,H 代表一个假设存在的通用算法(也称为停机判定器)。它试图解决这样一个任务:给定任意的程序 P 和输入 I,能够判断程序 P 在输入 I 下是否会停机。
-
2. 尚未能决定的问题 / Problems for Which We Can’t Decide Yet
指当前计算复杂性理论中未确定复杂度类别或解法的问题:
• P vs NP问题:最著名的开放问题,若P=NP,则所有NP问题都能高效解决,颠覆密码学等领域;反之则证实某些问题本质复杂。
• NP中间问题:如图同构问题(Graph Isomorphism),尚未证明属于P或NP完全类。
• PH与PSPACE关系:多项式层级(Polynomial Hierarchy)是否坍缩到某一层,仍是未解之谜。
3. 证明问题的困难性 / Proving Hardness of Problems
通过归约(Reduction)证明某问题至少与另一已知难题同样困难:
• NP困难(NP-Hard):若所有NP问题可归约到该问题,则其至少与NP中最难问题相当(如旅行商问题的优化版本)。
• NP完全(NP-Complete):既是NP类又是NP困难的问题(如SAT布尔可满足性问题),是NP类的“最难点”。
• 归约技术:例如将3着色问题归约为k着色问题,证明后者复杂度不低于前者。
4. NP类 / The Class NP
• 定义:非确定性多项式时间(Nondeterministic Polynomial Time)类,指问题的解可在多项式时间内被验证(未必能高效求解)。例如,给定一个数分解方案,可快速验证其正确性,但分解大数本身极难。
• 核心特性:NP类包含所有P类问题(因P类解可直接验证),但P=NP是否成立未知。
5. P vs NP问题 / The P vs NP Question
• 核心:询问“高效验证解”是否等价于“高效找到解”。若P=NP,则所有NP问题存在快速算法;否则,某些问题本质复杂。
• 影响:若P=NP,密码学(如RSA)将崩溃,优化问题可快速解决;反之则确认人类直觉与创造力不可替代。
• 现状:多数学者认为P≠NP,但严格证明仍缺失。该问题是克莱数学研究所悬赏百万美元的七大“千禧年难题”之一。
关键概念关联图
P ⊆ NP ⊆ PSPACE ⊆ EXPTIME
(严格包含关系尚未完全证明,但普遍推测成立)听不懂没关系,我们先来了解一些基本概念:
分步讲解:搜索问题(Search Problems)与NP类
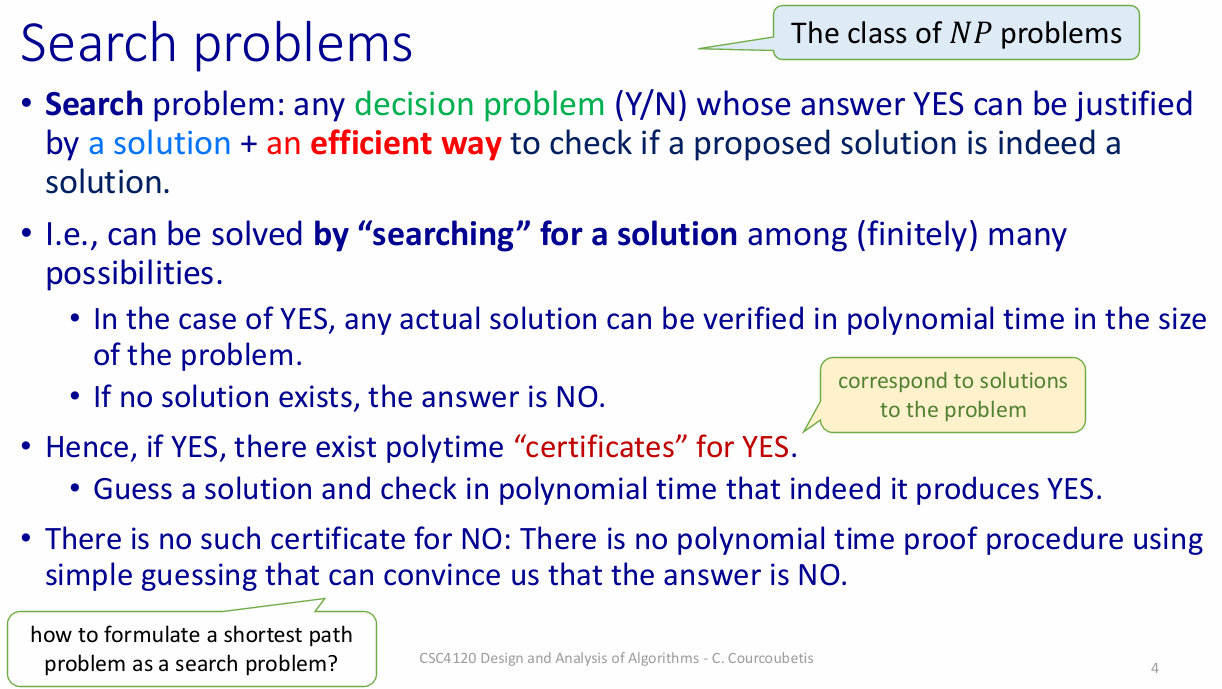
1. 搜索问题(Search Problem)的定义
核心要点:
• 搜索问题是一种决策问题(Decision Problem),即答案为“是(YES)”或“否(NO)”的问题。
• 关键特性:
• 若答案为“YES”,必须存在一个具体解(Solution),并且可以在多项式时间内验证该解的正确性。
• 若答案为“NO”,则不存在这样的解。
示例:
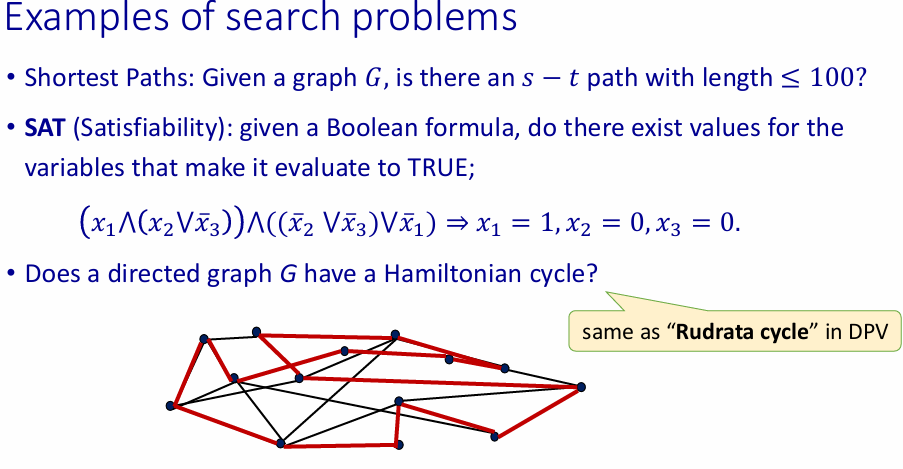
• 最短路径问题(Shortest Path):
• 决策问题形式:“图中是否存在从A到B的路径,长度≤k?”
• 搜索问题形式:若答案为“YES”,需给出具体路径,并验证其长度≤k。
2. 搜索问题的解决方式
核心方法:通过“搜索”有限可能性空间找到解。
• 可能性空间:问题所有潜在解的集合(如所有可能的路径)。
• 高效验证:一旦找到一个候选解,需在多项式时间内确认其正确性。
示例:
• 3着色问题(3-Coloring):
• 输入:一个无向图。
• 问题:“能否用3种颜色对图的顶点着色,使得相邻顶点颜色不同?”
• 若答案为“YES”,给出具体着色方案(证书),并验证相邻顶点颜色是否不同。
4. YES与NO答案的验证差异
• YES的验证:存在多项式时间的证书(例如具体路径或着色方案)。
• NO的验证:无法通过简单的“猜测”证明答案为“NO”。
• 例如:若图中不存在长度≤k的路径,如何高效证明这一点?目前没有通用方法(除非P=NP)。
• 这也是P vs NP问题的核心矛盾:若存在多项式时间算法直接找到解(P=NP),则NO答案也可高效验证,但目前未证明。
问题一:为什么“NO答案没有多项式时间的证明方法”?
核心解释
在NP类问题中,答案“NO”无法通过简单猜测和快速验证来证明,这与“YES”答案存在本质差异。以下是分步解析:
-
“YES”答案的验证机制:
- 存在一个证书(Certificate)(例如:具体的最短路径、3着色方案等)。
- 验证证书的正确性只需多项式时间(例如:检查路径长度是否≤k)。
-
“NO”答案的验证困境:
- 要证明“不存在解”,需穷举所有可能解并证明每个解均无效(例如:图中所有路径长度均>k)。
- 然而,可能的解数量通常是指数级的(如路径数量随节点数指数增长)。
- 目前没有已知方法能在多项式时间内高效完成这种穷举验证(除非P=NP)。
-
直观类比:
- 假设你声称“某宝箱中没有宝藏”,若要证明这一点,需检查所有可能的藏宝位置,这需要极大代价。但若只需证明“有宝藏”,只需拿出一个宝藏即可。
若存在多项式时间算法直接找到解(P=NP),则NO答案也可高效验证,但目前未证明?
-
“若P = NP,则NO答案可高效验证”的含义及原因
-
含义 :如果P类问题和NP类问题相等(即P = NP),那么对于所有NP问题,在得到“否”答案的时候,这个答案也可以被高效(在多项式时间内)验证。
-
原因 :通常,我们更熟悉的是对于NP问题,当答案是“是”时,我们可以高效地验证。例如,对于哈密顿回路问题,如果有解,验证解的正确性很快。但是如果P = NP,那么对于NP问题,即使是“否”答案,也存在一种方法可以高效验证。这是因为如果P = NP,那么所有NP问题都可以在多项式时间内解决,这也就意味着对于“否”答案,我们可以构造一个与之对应的证书(类似于解的结构,可以用于验证),并且在多项式时间内验证这个证书是否证明了答案是“否”。例如,对于某个NP完全问题(NP中最难的问题),如果P = NP,那么对于一个没有解的实例,我们可以高效地验证这个无解的状态,可能是通过某种对称性的证明或者其他数学结构来确认没有解,并且这个验证过程可以在多项式时间内完成。
-
5. 如何将最短路径问题转化为搜索问题?
步骤分解:
-
定义决策版本:
• 输入:图 G,起点 s,终点 t,目标长度 k。• 问题:“是否存在从 s 到 t 的路径,长度≤k?”
-
构造搜索过程:
• 搜索空间:所有可能的路径(可能指数级数量)。• 验证过程:若找到一条路径,检查其长度是否≤k(多项式时间)。
-
证书(Certificate):
• 若答案为“YES”,证书是具体的路径(例如节点序列)。• 验证证书只需遍历路径并计算总长度。
-
NP类特性:
• 验证路径长度的时间为 O(m)(m为路径边数),是多项式时间。• 因此(因为验证:是多项式时间),最短路径的决策版本属于NP类问题。
为什么说 “NO答案可高效验证”?
-
通常情况(当 P!=NP 时):对于 NP 问题,我们通常只能高效验证“是”的答案(即存在一个解时可以快速验证),但无法高效验证“否”的答案(即不存在解时难以快速证明无解)。
-
若 P=NP 的情况:如果 P=NP,那么对于每个 NP 问题,都存在一个确定性算法可以在多项式时间内解决问题。这意味着:
-
不仅“是”的答案可以高效验证,而且“否”的答案也可以通过某种构造或证明来高效验证。
-
例如,对于一个没有解的实例,我们可以找到一种方式(如反证法、数学结构等)来快速证明其无解,而这种证明本身也可以在多项式时间内验证。
-
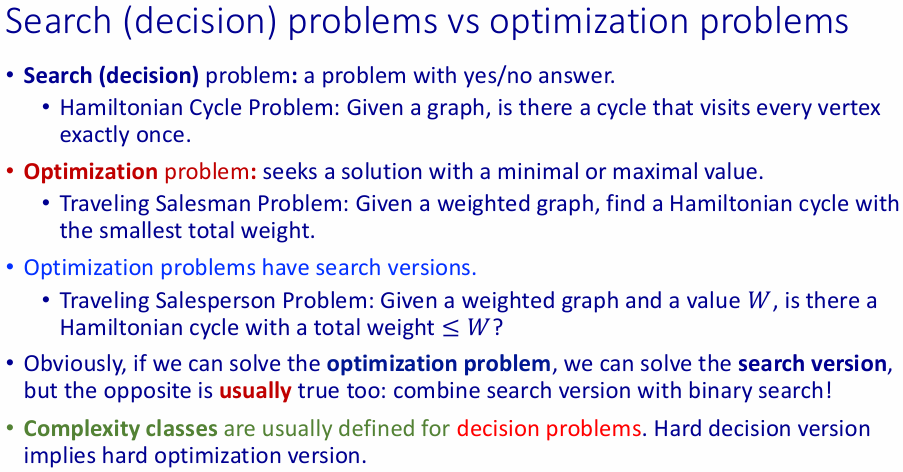
这张图是讲解 搜索(判定)问题 和 优化问题 之间的区别和联系。在算法与复杂度理论中,这两类问题经常一起出现,也常常容易混淆,下面我们来逐条解释。
🔵 1. 什么是 Search(Decision)Problem?判定问题
问题的答案是“是 / 否(yes/no)”的类型。
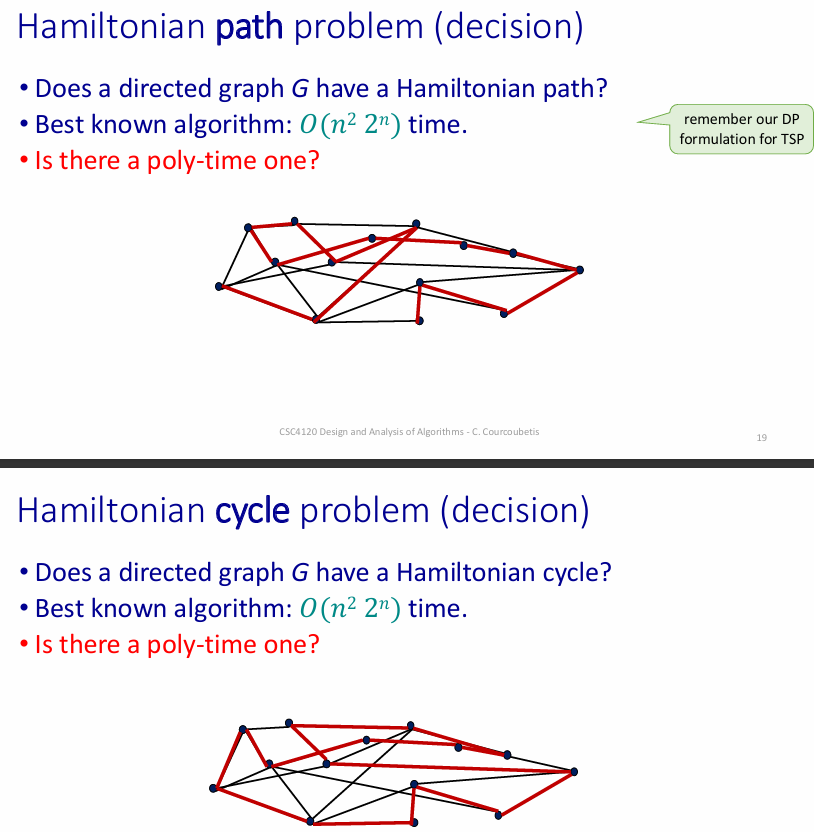
例子:Hamiltonian Cycle Problem
-
给一个图,是否存在一个“访问每个点恰好一次”的回路?
-
✅ 答案是 yes 或 no → 判定问题
🔴 2. 什么是 Optimization Problem?优化问题
要求找到最小值 / 最大值的解,而不仅仅是“有没有解”。
例子:旅行商问题(TSP)
-
给一个带权图,找出访问所有城市恰好一次、且总代价最小的路径。
-
不是 yes/no,而是找出最优路径 → 优化问题
🔁 3. 优化问题有对应的 Search(判定)版本
比如将优化问题加上一个阈值限制,就变成判定问题。
TSP 的 Search 版:
-
给定一个图和一个值
W,是否存在一条 Hamiltonian 回路,其权重 ≤ W? -
✅ 这个是 yes/no 的形式了 → 属于 判定问题
🔄 4. 解决优化问题 ⇒ 可以解决判定问题
如果你能求最优解,那当然可以判断“是否有小于等于某个值的解”。
但反过来呢?
通常我们也能通过 判定问题 + 二分搜索 来逼近最优解。
🟢 5. 为什么复杂度类通常定义在判定问题上?
-
复杂度理论(比如 NP, NP-complete)都是以“判定问题”为基础建立的。
-
这是因为:
-
判定问题的输出格式固定(yes/no),更容易统一分析。
-
很多优化问题可以转化成判定问题来处理。
-
所以我们常说“这个问题是 NP-难的”,通常是说它的 判定版本 是 NP-难的。
如果判定版本已经很难了,优化版本通常会更难。
✅ 总结对比表:
| 分类 | 描述 | 示例 |
|---|---|---|
| 判定问题 (Search) | 是否存在某种解?Yes / No | Hamiltonian Cycle Problem |
| 优化问题 | 找到最小 / 最大的解 | Traveling Salesman Problem (最短路径) |
| 联系 | 优化问题 ⇒ 判定问题 | 通过加阈值变成判断问题 |
| 转换方向 | 判定问题 + 二分 ⇒ 近似优化解 | 常用策略 |
| 复杂度定义点 | 基于判定问题构建复杂度类(如 NP) | 优化问题的难度依赖判定版本的难度 |
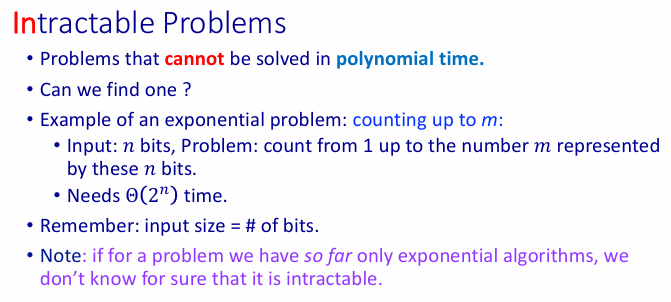
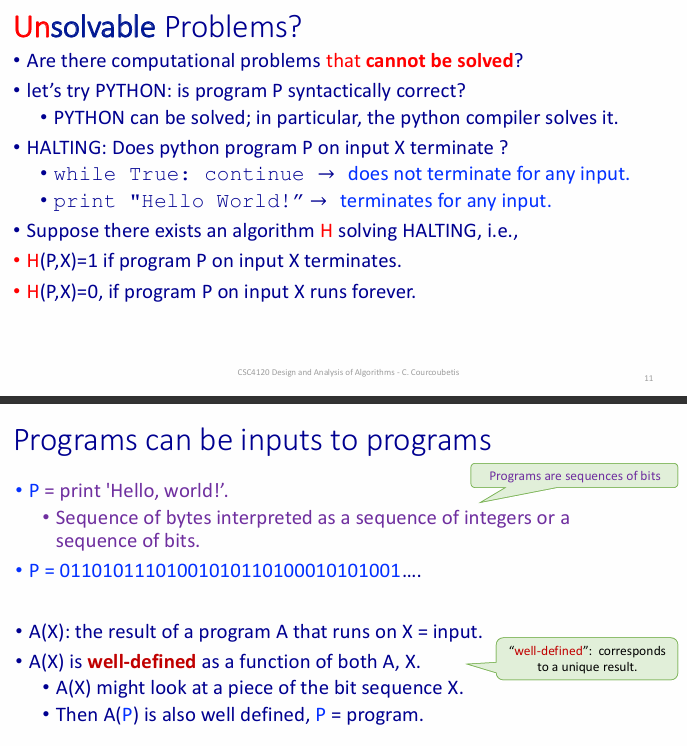
🟧 第二张图:Unsolvable Problems(不可解问题)
这是比 Intractable 更严重的类别:
根本没有任何算法能解决的问题!
🌟 例子:Halting Problem(停机问题)
问题描述:
给定一个程序
P和输入X,问:P(X)会不会最终停下来(terminate)?
✅ Python 编译器可以解决语法问题(例如 P 合法不合法),但不能决定“P 会不会停机”。
举两个 Python 程序的例子:
-
while True: continue➜ 永远不终止
-
print("Hello World!")➜ 一定终止
但是!有没有通用算法 H(P, X),能对所有程序和输入都判断停不停?
答案:没有。
💥 为什么?
-
假设有这样的算法
H(P, X):-
如果
P(X)会停机 ➜H(P, X) = 1 -
如果
P(X)会死循环 ➜H(P, X) = 0
-
图灵证明了这样的算法不可能存在(通过对角线论证、自指悖论等方式)
✅ 总结对比:
| 类型 | 定义 | 例子 | 可解性 |
|---|---|---|---|
| Intractable | 可以解,但只能在指数级时间内解决 | 排列问题、子集和问题等 | ✅ 可解,但慢 |
| Unsolvable | 根本不存在任何算法能解决 | 停机问题、自动程序验证等 | ❌ 不可解 |
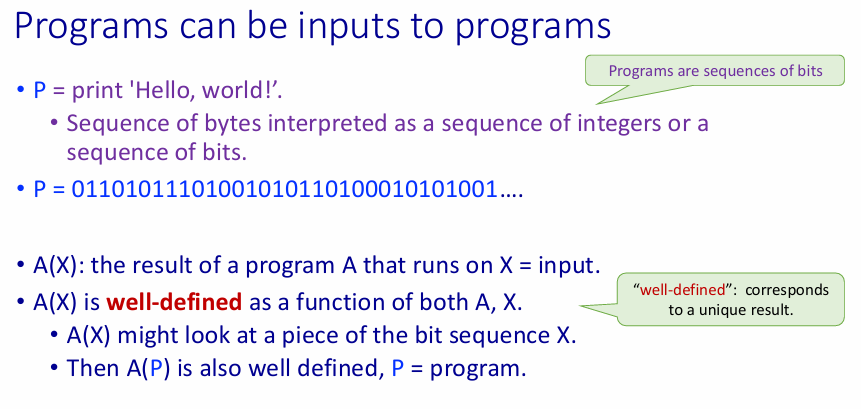
这张幻灯片解释了一个非常重要但常被忽视的思想:程序也可以作为其他程序的输入,这是图灵机和现代计算理论(包括不可判定性)的基础。
🧠 核心概念:程序 = 比特序列
“Programs are sequences of bits.”
—— 程序本质上就是一段 比特序列,因此可以被当作输入数据使用。
🔹 示例说明
-
举例:程序
P = print("Hello, world!")-
在计算机底层,它被编码为一连串的比特(或字节),如:
P = 0110101110100101011010000101001...
-
🔹 程序可以输入到另一个程序中:
设
A(X)表示程序A在输入X上的运行结果。
-
既然程序是比特串,那么
X可以是任意比特串,甚至也是一个程序! -
所以我们也可以写:
A(P)→ 表示程序 A 以程序 P 为输入运行。
🟢 “well-defined” 是什么?
如果函数
A(X)对每一对输入(A, X)都有一个明确唯一的输出,那它是 well-defined(良定义) 的。
图中解释了这个定义:
-
不论程序
A访问X的哪一部分,只要最后结果是确定的(唯一的),那我们说A(X)是 well-defined。 -
如果
X是程序P,那我们也可以说A(P)是 well-defined。
🧾 为什么这个思想很重要?
这是理解 停机问题(Halting Problem) 的前置知识:
-
因为你能把“程序本身”作为输入放进另一个程序,就可以构造自指(self-reference)。
-
这也正是不可判定性、对角线法、悖论构造(如 Cantor 和 Gödel 思想)等的核心。
🧩 举个简单例子帮助理解:
假设你写了个 Python 程序 A:
def A(x):
return eval(x)
你现在可以这样运行它:
A("1 + 2") # 输出 3
A("print('hi')") # 输出 hi
A("def f(): pass") # 返回 None
你甚至可以:
code = "print('hello world')"
A(code) # 执行另一个程序!
✅ 总结一句话:
程序本质是数据,因此程序可以“吃掉”程序作为输入,这为构造“自指问题”、不可判定问题打下基础。
这两张幻灯片是对停机问题(Halting Problem)不可判定性的核心证明——悖论构造法(self-reference contradiction)的详细展示,非常关键!
🧩 停机问题 Halting Problem 再回顾:
目标:我们想构造一个算法
H(P, X)判断:
程序P在输入X上是否会停止。
定义如下:
-
H(P, X) = 1:表示 会停机 -
H(P, X) = 0:表示 会陷入死循环
🧪 假设这种程序 H 存在(先假设能构造出来)
我们还开玩笑说可以“从百度买一个现成的 H”😂
并且它对任何程序P和输入X都正确判断是否停机。
😈 构造一个“反常识”的程序 A(P)
def A(P):
if H(P, P) == 1: # 如果 P(P) 会停机
while True: # 那我偏不停,我陷入死循环
continue
else: # 如果 P(P) 会死循环
return # 那我偏要停机
这段程序是核心:它对 H 做了“唱反调”的行为。
🔥 问题来了:那 A(A) 是什么行为?
让我们问:程序 A 运行在输入 A 上,即 A(A),会停机吗?
分情况讨论:
-
如果
H(A, A) = 1(即 A(A) 会停机)
→ 按照 A 的定义,它会陷入死循环 ➜ 实际不会停!
⛔ 矛盾! -
如果
H(A, A) = 0(即 A(A) 不停)
→ 按照 A 的定义,它直接 return(终止) ➜ 实际会停!
⛔ 又矛盾!
❌ 得出结论:H 不可能存在
我们通过构造程序 A,只要你假设 H 存在,马上就能构造出一个“让 H 自己打脸”的程序。
这叫做:
-
自指悖论(Self-reference paradox)
-
是图灵证明不可判定问题的经典方法。
✅ 总结一句话:
一旦允许程序把“自己作为输入”,就可能引发逻辑悖论。这正是为什么通用的停机判断程序 H 不可能存在。
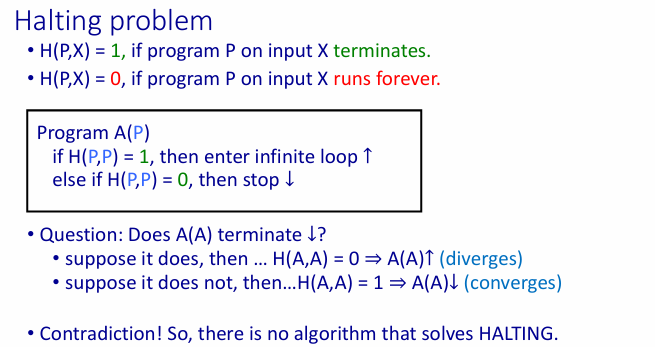
这张幻灯片是对停机问题不可判定性(Halting Problem Undecidability)的最终总结,利用“悖论式反证法”一锤定音,说明:停机问题无法通过算法通用解决。
🔁 回顾定义:
-
H(P, X) = 1⟶ 程序P在输入X上 会停机 -
H(P, X) = 0⟶ 程序P(X)会死循环
💥 构造自反程序 A(P)
def A(P):
if H(P, P) == 1:
while True: pass # 故意死循环
else:
return # 正常退出
这个程序的目的是:故意唱反调。如果 P(P) 会停,它就偏不停;反之,它就偏要停。
❓ 焦点问题:A(A) 会停机吗?
-
用 反设法 来分析这件事。
-
只看
A(A)的行为,分两种情况:
🟦 Case 1:A(A) 假设会停(↓)
那
H(A, A)应该输出1(因为 H 判断它会停)
但这会触发A去执行死循环(↑)
➡️ 矛盾:说会停,结果却死循环(diverges)
🟦 Case 2:A(A) 假设不会停(↑)
那
H(A, A)应该输出0(因为 H 认为它不会停)
但这会触发A去 return(↓)
➡️ 又矛盾:说不会停,结果却停了(converges)
❗ 结论:
无论你假设 A(A) 会不会停,都会产生矛盾。
所以:
Contradiction! → 所以不存在这样的 H 算法!
⛔ Halting Problem is undecidable
✅ 总结一句话:
假如存在万能“停机判断器”,我们就能构造出一个“自我打脸”的程序,使得它既要停又不能停,从而逻辑上不成立。
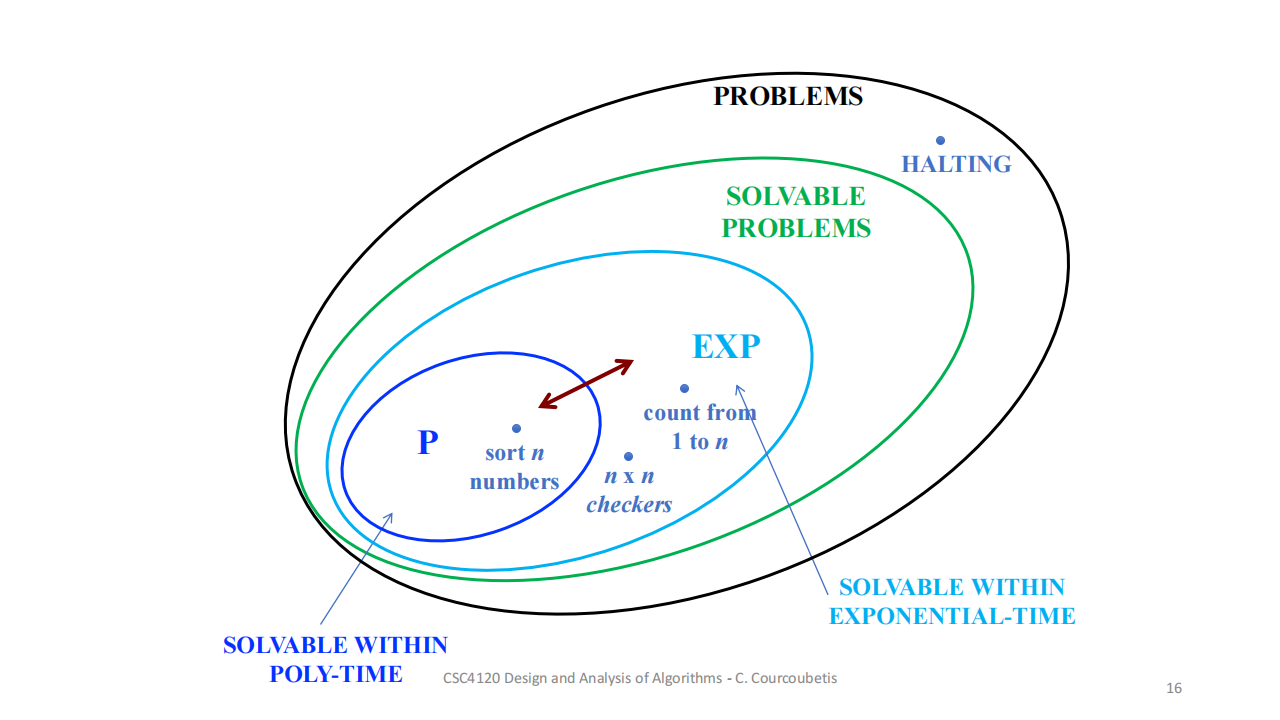
这张图用**嵌套的集合图(Venn Diagram)**形象地展示了计算复杂度理论中的主要问题类别及其关系,解释了:
-
哪些问题能解?
-
哪些能在合理时间内解?
-
哪些根本无法解决?
🧭 图中区域说明:
🔵 P 类(多项式时间内可解的问题)
-
定义:所有能在多项式时间内解出的问题
-
✅ 高效、可行
-
例子:
-
sort n numbers:排序问题 -
n x n checkers:棋盘类、博弈类问题(某些有高效算法)
-
🔷 EXP 类(指数时间内可解)
-
定义:能在指数时间(如 O(2ⁿ))内解决的问题
-
⛔ 通常太慢,不实际
-
✅ 但至少是“能解的”
-
例子:
-
count from 1 to n,当n以位表示时,这个就是指数规模的问题(因为输入只有 log(n) 位)
-
🟢 Solvable Problems(可解问题)
-
包含了所有
P和EXP问题,以及其他非多项式非指数,但仍可解的问题 -
✅ 存在某种图灵机算法可以得出正确结果,只是可能很慢
⚫ Problems(所有问题)
-
这个全集包括所有你能提出的问题(有意义的问题)
🔴 外圈上的蓝点:HALTING
-
举例:停机问题
-
❌ 不可解!不在任何“Solvable”区域内
-
说明有的问题根本没有任何算法可以解决(不可判定问题)
📌 总结对比:
| 区域 | 含义 | 举例 | 能力 |
|---|---|---|---|
| P | 多项式时间内可解 | 排序、查找 | ✅ 高效解决 |
| EXP | 指数时间可解 | 穷举搜索 | 🟡 理论可解但太慢 |
| Solvable | 图灵机能解的问题 | 上述所有 + 更多 | ✅ 存在算法 |
| 外圈问题(如 Halting) | 根本不可解 | 停机问题 | ❌ 无解 |
🔺 红色箭头:表示难度上升(从 P → EXP → 不可解)
✅ 一句话总结:
并非所有问题都有解,有些能高效解(P),有些解得很慢(EXP),但有些根本无从下手(如 Halting Problem)。
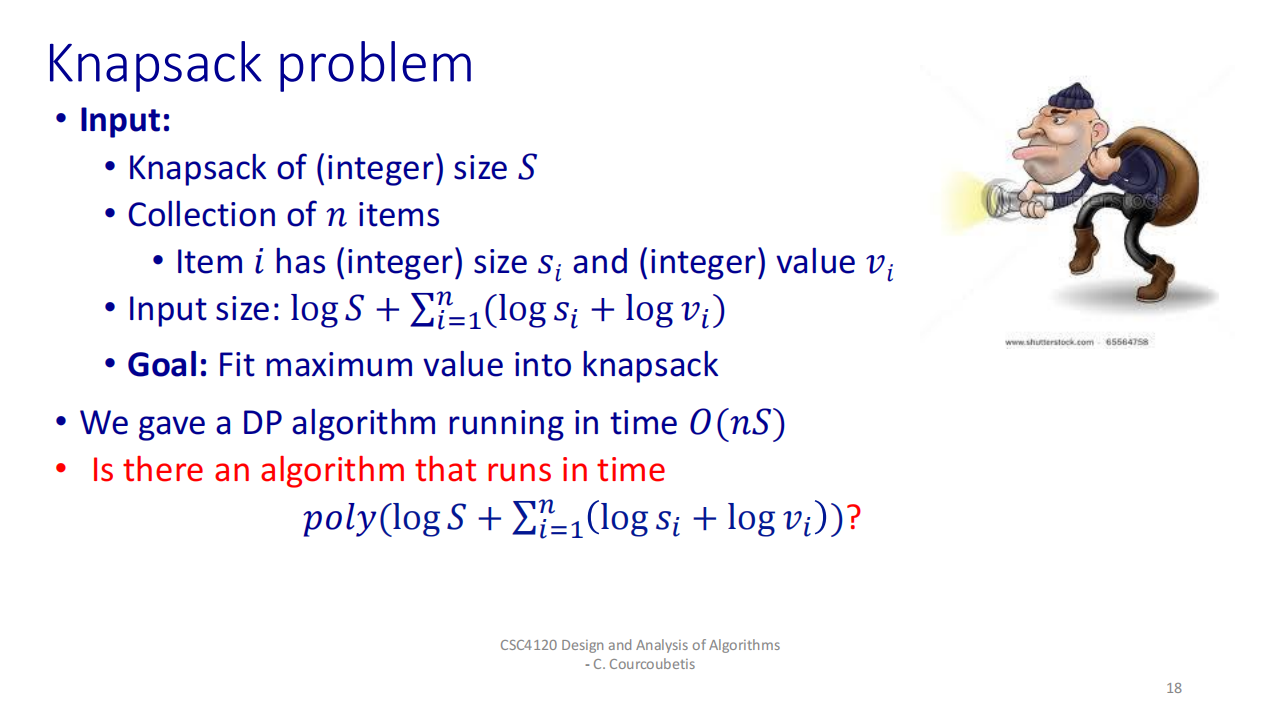
背包问题的定义
背包问题是一个经典的组合优化问题,通常描述为:给定一组物品,每个物品有特定的重量和价值,目标是在不超过背包承重限制的前提下,选择物品使得总价值最大化。
背包问题的类型
背包问题有多种变体,主要包括:
- 0-1 背包问题:每个物品只能选择一次或不选择。
- 完全背包问题:每个物品可以选择多次。
- 多重背包问题:每个物品有多个可选数量。
- 分数背包问题:物品可以分割,选择部分物品。
0-1 背包问题的动态规划解法
0-1 背包问题通常使用动态规划来解决。定义一个二维数组 dp,其中 dp[i][j] 表示前 i 个物品在背包容量为 j 时的最大价值。
def knapsack(weights, values, capacity):
n = len(weights)
dp = [[0] * (capacity + 1) for _ in range(n + 1)]
for i in range(1, n + 1):
for j in range(1, capacity + 1):
if weights[i-1] <= j:
dp[i][j] = max(dp[i-1][j], dp[i-1][j-weights[i-1]] + values[i-1])
else:
dp[i][j] = dp[i-1][j]
return dp[n][capacity]
weights = [2, 3, 4, 5]
values = [3, 4, 5, 6]
capacity = 5
print(knapsack(weights, values, capacity)) # 输出: 7
完全背包问题的动态规划解法
完全背包问题的解法与0-1背包问题类似,但允许每个物品多次选择。
def complete_knapsack(weights, values, capacity):
n = len(weights)
dp = [0] * (capacity + 1)
for i in range(n):
for j in range(weights[i], capacity + 1):
dp[j] = max(dp[j], dp[j - weights[i]] + values[i])
return dp[capacity]
weights = [2, 3, 4, 5]
values = [3, 4, 5, 6]
capacity = 5
print(complete_knapsack(weights, values, capacity)) # 输出: 7
多重背包问题的动态规划解法
多重背包问题中,每个物品有多个可选数量。可以通过将多重背包问题转化为0-1背包问题来解决。
def multiple_knapsack(weights, values, counts, capacity):
n = len(weights)
dp = [0] * (capacity + 1)
for i in range(n):
for j in range(capacity, weights[i] - 1, -1):
for k in range(1, counts[i] + 1):
if j >= k * weights[i]:
dp[j] = max(dp[j], dp[j - k * weights[i]] + k * values[i])
return dp[capacity]
weights = [2, 3, 4, 5]
values = [3, 4, 5, 6]
counts = [1, 2, 3, 2]
capacity = 5
print(multiple_knapsack(weights, values, counts, capacity)) # 输出: 7
分数背包问题的贪心算法解法
分数背包问题可以使用贪心算法来解决,优先选择单位重量价值最高的物品。
def fractional_knapsack(weights, values, capacity):
n = len(weights)
items = list(zip(weights, values))
items.sort(key=lambda x: x[1] / x[0], reverse=True)
total_value = 0
for weight, value in items:
if capacity >= weight:
total_value += value
capacity -= weight
else:
total_value += value * (capacity / weight)
break
return total_value
weights = [2, 3, 4, 5]
values = [3, 4, 5, 6]
capacity = 5
print(fractional_knapsack(weights, values, capacity)) # 输出: 7.5
总结
背包问题是一个广泛研究的优化问题,不同类型的背包问题有不同的解法。动态规划是解决0-1背包、完全背包和多重背包问题的常用方法,而贪心算法则适用于分数背包问题。。
📌 问题 1:为啥要用 bit 来表示输入大小?
✅ 原因:衡量输入规模的真正标准是输入占了多少位(bit)
🌰 举个例子:
-
假设你输入的是一个整数
S = 1000000(一百万)-
这个数值本身很大
-
但它只需要约 20 bits 就能在计算机里表达(因为 log2(1000000)≈20\log_2(1000000) \approx 20)
-
🔺 为什么这重要?
如果你写一个算法,运行时间是 O(S),看上去像是“线性时间”,但要小心:
-
输入只用了 20 bit 表示
-
你的算法用了
O(S) = O(1000000)步 -
实际上你用了 指数时间,因为1000000 = 2^{20}
➡️ 你输入了 20 bit,却用了 2202^{20} 步去处理它!
这就不是我们想要的“多项式时间”算法。
📌 问题 2:这和 Problems we can’t decide yet in P 有啥关系?
这就引到了 Knapsack 问题 的核心困境:
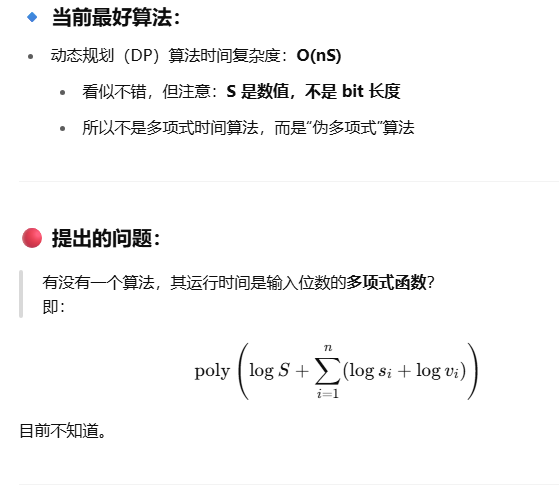
📦 背包问题的现状:
我们现在有个动态规划算法,复杂度是:
O(nS)
但要注意:
-
S是“数值”,而不是“bit 表示长度” -
所以,算法并不是严格的多项式时间(是“伪多项式时间 pseudo-polynomial”)
那为什么它算是“we can’t decide yet in P”?
因为我们:
-
✅ 能解这个问题(算法已知)
-
❌ 但我们不知道有没有真正的“P类解法”(真正 bit 多项式时间的)
这类问题就属于:
“目前无法确认是否属于 P 类”
即:“Problems for which we can’t decide yet in P”
✅ 总结(直观点):
| 问题 | 简单说就是… |
|---|---|
| 为什么用 bit ? | 因为复杂度是相对“输入长度”,而不是“数值大小”,防止伪装成“快” |
| 和“还不能判断是不是 P”有啥关系? | 有算法,但运行时间不是 bit 级多项式 → 所以还不能归入 P 类 |
-
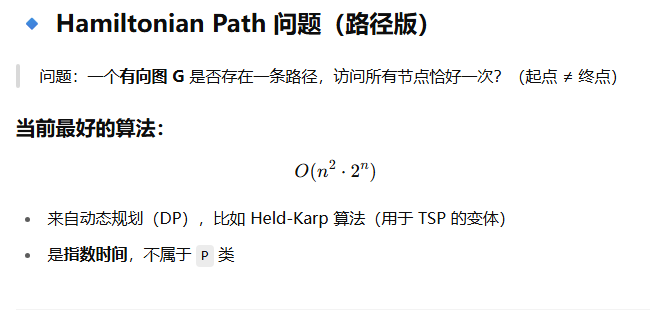
0 - 1 背包问题
-
问题描述 :给定一组物品,每种物品都有自己的重量和价值,在限定的总重量内,如何选择物品使得总价值最大,并且每个物品只能选择装或者不装。
-
时间复杂度分析 :0 - 1 背包问题通常使用动态规划来解决。假设背包容量为 W,物品数量为 n,动态规划的方法时间复杂度为 O(nW)。看起来像是一个多项式时间的算法,因为 n 和 W 通常被认为是输入规模的两个维度。但是,从严格的信息论角度讲,在分析算法的时间复杂度时,需要把输入视为二进制位数。
-
例如,容量 W 的二进制位数为 log W + 1,那么 W 的大小是指数级别于其二进制位数的。所以当把问题看作输入是以二进制编码输入时,0 - 1 背包问题的时间复杂度实际上是伪多项式时间,而不是真正的多项式时间。因为它依赖于数值 W 的大小,而不是输入的二进制位数,所以 0 - 1 背包问题不是 P 问题。
-
-
NP 问题(Nondeterministic Polynomial Time Problem)
-
是指那些可以在多项式时间内验证一个解是否正确的问题。对于NP问题,我们不一定能在多项式时间内找到一个解,但如果给了一个解,我们可以在多项式时间内验证这个解是否正确。0 - 1 背包问题就属于这一类。给定一个物品的选择方案和背包容量,我们可以在多项式时间内验证这个方案是否满足背包容量限制,以及是否达到给定的价值。
-
🧠 和我们前面学的内容有什么关系?
这些问题都属于:
🔷 Problems for which we can’t decide yet if they are in P
-
✅ 它们是 判定问题
-
✅ 它们属于 NP 类(可以在多项式时间内验证答案是否正确)
-
❌ 但我们 还不知道是否存在多项式时间算法
这就把它们归类到了 P vs NP 的核心问题范围。
❓ 提问:
Is there a poly-time one?
-
我们不知道!
-
所以 TSP 是属于**“目前不确定是否属于 P 类”**的问题之一。
📌 下半部分:More NP-like Problems
这些都是在实践中非常重要、但目前还找不到多项式时间解法的经典问题。
🧩 列表中常见的 NP-complete 问题包括:
| 类别 | 例子 |
|---|---|
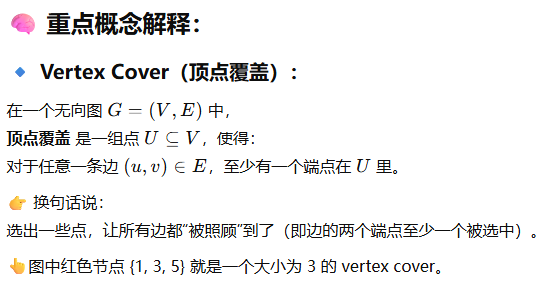
| 图论相关 | Clique, Independent Set, Graph Coloring, Vertex Cover |
| 优化与调度 | Multiprocessor Scheduling, Max-Cut |
| 路径与组合 | Longest Path, Disjoint Paths |
| 数学问题 | Subset Sum, Integer Linear Programming |
| 满足问题 | Constraint Satisfaction |
🧠 和我们学的核心概念联系:
这些问题都属于:
✅ 在 NP 类(我们可以验证答案)
❌ 但还未证明有多项式解法
➡️ 所以它们都落入“我们无法决定是否在 P”的类别中
这也正是:
❗ P vs NP 问题的核心
✅ 总结一句话:
TSP 和图中的其他问题都属于目前无法确认是否属于 P类的难题,也是P vs NP 问题的主角群。
**“问题难度证明(hardness proof)”**的主题,也就是 NP 完全性理论的核心部分。
🔖 上半部分:Roadmap(重点部分加深)
我们前面学的是:
-
P、EXP、Unsolvable(复杂度分类)
-
哪些问题可能不属于 P(如 TSP、Knapsack、Hamiltonian Cycle)
现在开始关注:
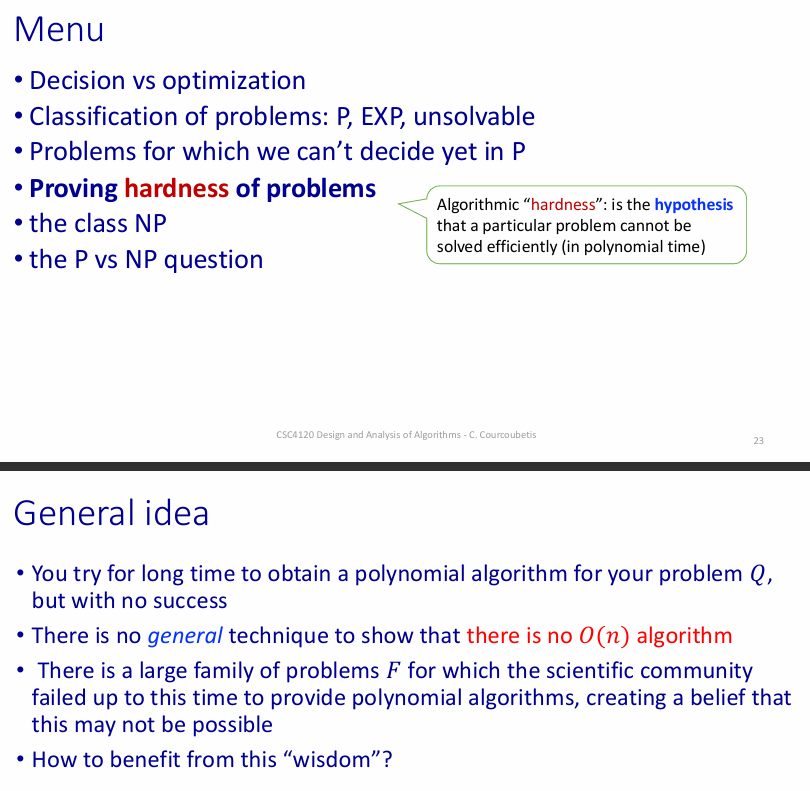
🟥 Proving hardness of problems
想办法“证明一个问题是难的”,特别是“它不可能有多项式解法”(除非发生奇迹,比如 P=NP)
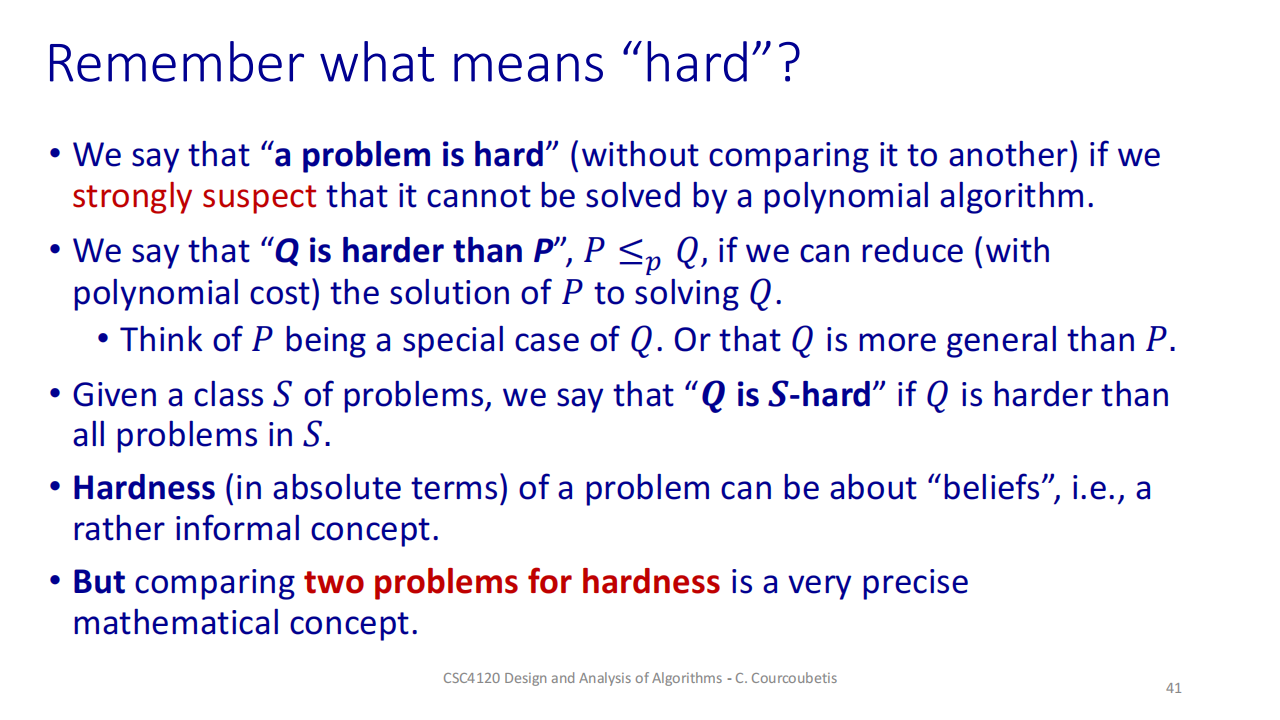
🧠 关键术语:Hardness
算法中的 “hardness” 不是指它现在难写代码,而是:
✅ “我们有强烈证据相信,它无法在多项式时间内解决”。
换句话说:
你想找个 O(n⁵)、O(n¹⁰) 算法?都找不到
—— 不是你太菜,而是问题本身就不属于 P 类
📘 下半部分:General Idea
这是 hardness 理论的哲学出发点,也可以叫“经验法则”:
1. ❌ 你花了很久,还是没能找出多项式算法。
-
举例:你尝试对 TSP、Hamiltonian Path 写个
O(n^3)解法,失败。 -
其实不是你失败,而是大家都失败了。
2. ⚠️ 没有通用手段可以“证明 O(n) 不存在”
我们目前不能数学上证明某个问题没有 O(n⁵) 解法(除非能解决 P vs NP)
3. 🌍 所以大家默认“某些问题可能真的没有多项式解”
这个信念背后的依据是:
有一大堆问题 F,几十年来,成千上万人都没能找到 P 类算法
🔑 最后一句的核心问题:
那我们该怎么“利用”这种“集体智慧”呢?
这就引出了接下来会学的:
🔄 归约(reduction)
🧩 NP-complete 的定义与证明方法
✅ 总结一句话:
虽然我们不能“绝对证明”一个问题不能多项式求解,但我们可以通过“归约”和“经验”认定它是NP-hard,这是我们目前最强的工具。
我们现在刚好进入计算复杂度理论中最核心、最激动人心的一部分:NP 完全性理论(NP-completeness theory)。下面我会用分层结构+通俗比喻来完整梳理整个学习脉络。
🧭 我们学了什么?目前进展到哪里了?
✅ 1. P vs NP 背景起点
我们先区分了两类问题:
| 类别 | 定义 | 例子 | 是否可验证 |
|---|---|---|---|
| P | 可以在多项式时间内求解的问题 | 排序、图最短路、矩阵乘法 | ✅ |
| NP | 给出一个解之后,可以在多项式时间内验证其正确性的问题 | TSP、Knapsack、3-SAT、图着色 | ✅ |
这些 NP 问题我们可以验证答案对不对,但不一定能快速找到答案
✅ 2. EXP 与 Unsolvable 的边界感
-
有些问题能解,但很慢(EXP)
-
有些问题根本不能解(如 Halting Problem)
✅ 3. “我们无法判断它是否属于 P”的问题
-
我们学了:
-
TSP、Knapsack、Hamiltonian Cycle…
-
都有指数时间算法
-
但没有找到多项式解法
-
❗我们卡住的地方是:
我们发现这些问题“好像都很难”,但又没法证明“到底是不是 P 类外的”
这是学术界几十年来的大难题。
🚨 前人在研究过程中发现了一个惊天发现:
虽然不能证明某个问题不是 P,但可以发现:
一大群 NP 问题彼此之间可以归约!
🔄 举个通俗比喻来说明“归约”的力量:
你不会解“难题 A”,但发现只要你会解“难题 B”,你就能立刻解决 A。
换句话说:
-
如果 B 有解法,A 就也有解法(你只要会 B,就“顺带”会了 A)
-
所以你可以说:“A 不会比 B 简单!”
💡 接下来我们要学习的:
🟥 NP-complete 理论
就是研究这样的一类“超级代表性问题”:
🔥 NP-Complete 问题 = NP 中最难的问题
-
如果你能用多项式时间解决一个 NP-complete 问题
-
那你就能解决所有 NP 问题!也就是说:P = NP!
🧱 前人一步步发现的:
-
第一个 NP-complete 问题是 SAT(布尔可满足性)
-
后来大家开始不断把 SAT 归约到别的 NP 问题上
-
从而建立了一整套“传染链条”:证明一个 NP-complete 问题,就能证明一堆
🧠 接下来我们要学的内容:
| 学什么 | 目标 |
|---|---|
| 什么是归约(Reduction) | 学会如何把一个问题“变形”为另一个 |
| 什么是 NP-hard / NP-complete | 搞清楚这两个术语的定义与区别 |
| 如何证明一个问题是 NP-complete | 掌握常见套路(比如归约自 3-SAT) |
| 常见 NP-complete 问题有哪些 | 掌握代表性问题,如 3-SAT、Clique、Vertex Cover、Subset Sum、TSP 等 |
✅ 最终目标:
🔍 给你一个实际问题,你能判断它是不是 NP-complete
✏️ 如果是,你知道不能指望有高效算法,应该转向:
-
近似算法
-
启发式搜索
-
限定规模处理(固定参数算法)
📦 总结(一句话版本):
我们现在站在计算理论的核心十字路口:
如果我们能解决 NP-complete 问题,我们就解决了 P vs NP!
但目前大家都怀疑,这些问题本质上就是没法快速解决的。
也就是:如何建立“NP 完全性理论”的方法论(methodology)?
🔵 上半部分总结:为什么我们需要这个理论?
就像你学一套功夫,发现打不过敌人(找不到多项式算法),你就要怀疑:可能是敌人太强,不是你太弱。
但问题是:
-
❌ 没有通用办法能“数学上证明”一个问题没有 O(n) 算法
-
✅ 但我们看到了很多问题都没人解决
-
所以我们推测:它们可能真的不在 P 类
✅ “前人失败的经验”本身成了一种智慧
🧭 下半部分是关键:如何利用这种“智慧”?
我们进入“归约式难度理论”的正式套路:
🧱 Step-by-step 方法论(用于证明 Q 很难):
✅ Step 1:找一大堆“已知困难的问题” F
这些问题必须满足两个条件:
-
没人能找到它们的多项式解法(即使尝试了几十年)
-
它们彼此之间可以“归约”来回转换(poly-time 归约)
换句话说:
它们是“成团出现”的,一旦解决了一个,全团都能解!
➡️ 这组 F,就是所谓的 NP-complete 问题集
✅ Step 2:把你关心的问题 Q 归约到 F 中的某个问题 Pᵢ
你要证明:Q 至少不比 Pᵢ 简单,也就是说:
-
如果你能用多项式时间解决 Q,
-
那么你也可以顺带解决 Pᵢ(因为 Pᵢ ≤ₚ Q)
✅ 一旦做到了:
你就可以得出结论:
❗“Q 属于 NP-complete”的怀疑就合理了
❌ 所以不用再期待找多项式算法(unless P=NP)
💡 举个比喻(通俗化解释):
你怀疑“龙鳞盔甲”是很坚硬的,你试图用刀砍都砍不破。然后你发现——
“这个盔甲做的方式,跟地球上所有已知最坚硬材料一样!”
那么即使你砍不出裂痕,你也可以相信它是真的硬,不是你刀太钝。
✅ 总结一句话:
归约法是一种“负向证明”方法,用来建立我们对问题“不可多项式求解”的信心。
它构成了NP 完全性理论的核心思想。


非常好!下面我将对你发的这 四张图内容进行逐句翻译 + 中文解释,并穿插直白通俗的讲解,帮助你真正“学进去”。
🟨 第 1 张幻灯片:Reasoning that a problem is hard
“推理一个问题是困难的”
原文 & 翻译:
-
You have learned ways to design polynomial-time algorithms for many problems.
你已经学会了为很多问题设计多项式时间算法的方法。🟢 ✔️ 比如贪心、动态规划、图搜索、分治等
-
When faced with a new problem, you’ll try applying them in various ways.
面对一个新问题,你会尝试用这些方法去解。
-
What if you don’t succeed?
如果你搞不定这个问题呢?
-
Are there ways for you to know not to waste time trying in the first place?
有没有什么方法能让你判断这个问题就别再白费力气了?🟡 也就是:“能不能提前知道这玩意太难了,不要再试了?”
-
Can you prove there’s no poly-time algorithm?
你能不能证明它不可能有多项式时间算法?
-
In the problem of counting from 1 through n, the proof is easy as the output itself is exponential in the input.
如果是“从 1 数到 n”的问题,证明它慢是简单的 —— 因为输出本身就是指数级的(相对于输入位数)🧠 举例:你输入
n=1000000只用了 ~20 bits 表示,但要数完要花 100 万次
-
But what if the output is polynomial in the input?
但如果输出只是多项式级别呢?🔴 也就是说:你没法通过“输出爆炸”来证明它慢
-
When can you give up?
那你到底什么时候能死心不做了?
🌟 中文总结:
我们可以很容易看出“输出太大 → 必然慢”,
但如果输出是正常的(多项式级),你如何证明“它无解”?
这就进入了“如何科学地认定问题是难的”的话题。
🟨 第 2 张幻灯片:Proving a negative
原文 & 翻译:
-
How to prove there is no polynomial time algorithm for a problem whose solution is polynomial in length?
怎么证明一个“解本身不长”的问题,却无法用多项式时间解出?
-
i.e., show that there is no algorithm of time O(n), or O(n²), or O(n³), ...
换句话说,没有 O(n)、O(n²)、O(n³) 这类时间复杂度的算法。
-
Simple Answer: We don’t know how to prove such statements!
答案很简单:我们根本不知道怎么证明这种事!
-
Don’t even have general technique to show that there is no O(n) algorithm.
我们甚至没有通用方法来证明“没有 O(n) 算法”这件事。
🌟 中文总结:
我们现在的数学工具根本无法证明“某问题不属于 P”,这也是为什么 P vs NP 问题几十年没人能解决。
🟨 第 3 张幻灯片:“Proving” a negative: the science way
原文 & 翻译:
-
How to prove no Perpetual Motion Machine?
怎么证明永动机不可能存在?
-
We can prove one exists by building it.
如果永动机能造出来,我们直接造一个就能证明它存在。
-
We can’t prove none exists.
但我们没法**证明“全世界任何一种永动机”都造不出来。
-
Especially if only “evidence” is that we tried and failed.
特别是我们唯一的证据只是“我们试了,失败了”。
-
Many have tried to build one and failed.
很多人都尝试造永动机,都失败了。
-
A preponderance of evidence that is impossible.
这就形成了一个“压倒性的证据”来支持“永动机不可能存在”。
-
But maybe only idiots tried to build PMMs!
🤪 但也可能只是因为尝试造永动机的人都不够聪明……
-
Maybe possible if someone from CUHK tries?
🤔 也许中大(CUHK)的人试试就成功了呢?(这是幽默自嘲)
🌟 中文总结:
不能形式地“证明”某事不可能,但可以用历史经验来判断:“已经有很多人试过失败了,大概率真的做不到。”
🟨 第 4 张幻灯片:A stronger “proof” for hardness
原文 & 翻译:
-
Prove that the “laws of physics” preclude its existence.
如果你能证明它违反物理定律,就等于证明它不可能存在。
-
Lots of smart people have tested these laws.
很多聪明人已经验证了这些物理定律。
-
Gives a real preponderance of evidence the laws are correct.
这就构成了一个“非常真实可靠的证据链”来支持这些定律。
-
If a PMM was possible, it would prove those laws false.
如果真能造出永动机,那就等于这些物理定律是错的。
-
So, unless a very large number of smart people are all wrong, there is no perpetual motion machine.
所以,除非所有聪明人都错了,否则永动机是不可能的。
-
We use this approach for deriving computational hardness.
我们正是用这种方法来定义计算上的“困难”问题。
🌟 中文总结:
我们没法“形式证明”某问题无解,但可以借助“系统归纳 + 历史失败 + 理论推理”——这就是 NP-complete 理论的方法论基础。
🧾 总结一下你现在学到了什么:
| 内容 | 意义 |
|---|---|
| 不能证明“没有 O(n)”算法 | 数学上做不到 |
| 但可以科学归纳 | 用归约 + 历史失败做证据 |
| 举例:永动机不可能 | 因为违反物理定律 + 成千上万人失败 |
| 类比:我们怀疑 NP ≠ P | 因为几十年没人找到 poly-time 解法 |
非常好!你这两页内容标志着我们正式进入了 NP 完全性理论的技术核心:归约(Reduction)方法。
🧭 第一张(第 30 页):Menu 更新,明确主题是:
**“证明问题很难”**的方式是通过:
🧱 hardness via reduction techniques(通过归约技巧证明难度)
🧾 中文逐句翻译 & 通俗解释(第 31 页)
📌 原文:
Frustrating: Huge number of fundamental problems have defied classification as being in P for decades.
中文翻译:
令人沮丧的是:大量基础性问题几十年来都无法被归类为 P 类问题(即找不到多项式时间算法)
🟡 举例:TSP、SAT、3-Coloring、SubsetSum…
📌 原文:
Show that these fundamental problems are "computationally equivalent" and appear to be different manifestations of one really hard problem.
中文翻译:
我们发现这些问题在计算本质上是等价的,它们可能只是一个真正困难问题的不同表现形式
🎯 通俗理解:
看上去它们题目不同,但它们都一样“无解”——只要你能解其中一个,其它都能顺带解。
这构成了 NP-complete 问题背后的惊人统一性!
📌 原文:
This enforces even more our belief that there is no poly-time algorithm.
中文翻译:
这进一步加深了我们对“这些问题无法多项式求解”的信念
🧠 因为这么多问题几十年都没人解决,而且还彼此等价
→ 不太可能大家都“恰好没找对方法”,更可能是它们本身就不是 P 类!
📌 原文:
Technique: Polynomial-time reductions.
中文翻译:
我们用的方法就是:多项式时间归约
🔁 什么叫归约?就是:
把一个问题 A 转化为 问题 B
如果 B 有解法,我们可以反向用它来解 A
✅ 通俗举例:归约就像“翻译机器语言”
想象你:
-
不会解决“图着色问题”
-
但你知道如何解决“3-SAT 公式可满足问题”
那么:
如果你能把“图着色”翻译成一个“SAT 公式”,
然后丢给别人用他们的算法解,再翻译回去
➜ 那你就解决了“图着色”!
这就叫做:归约(Reduction)
🎯 总结一句话:
我们无法直接证明某问题“没法快解”,
但我们可以通过“归约”证明它至少不比已知困难问题简单
➜ 这正是 NP-complete 问题的基础方法论。
可视化图解
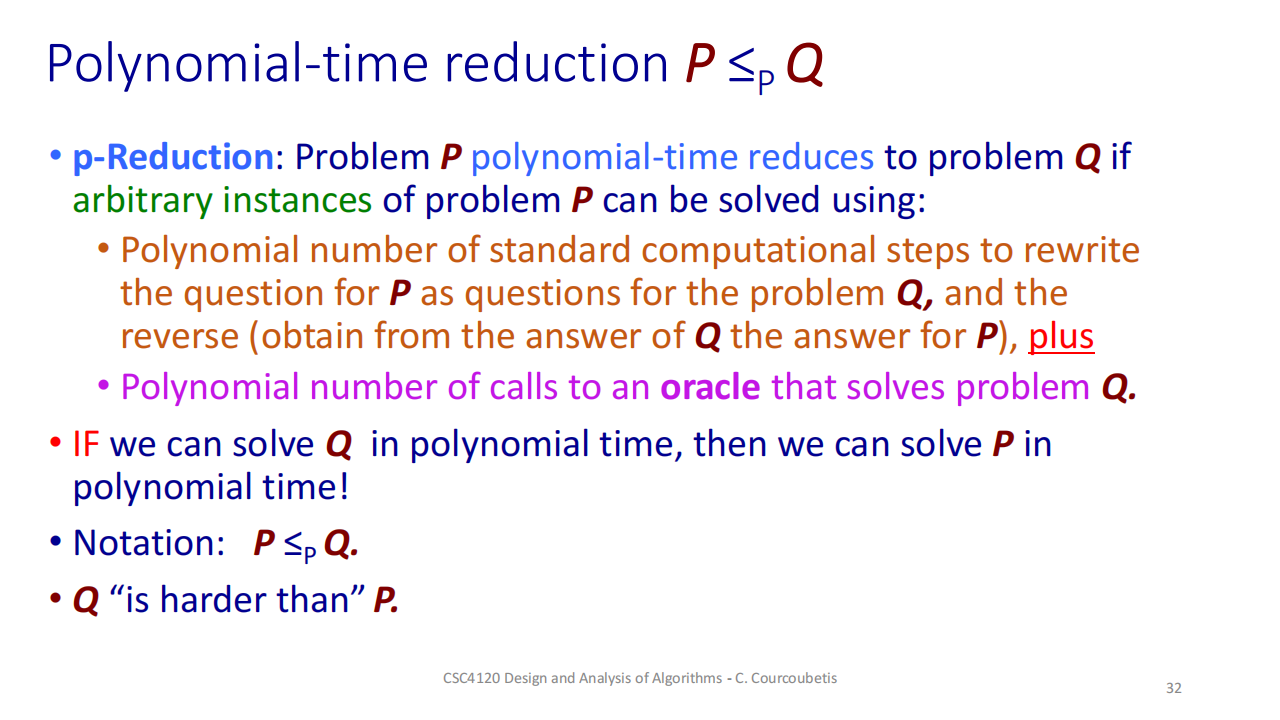
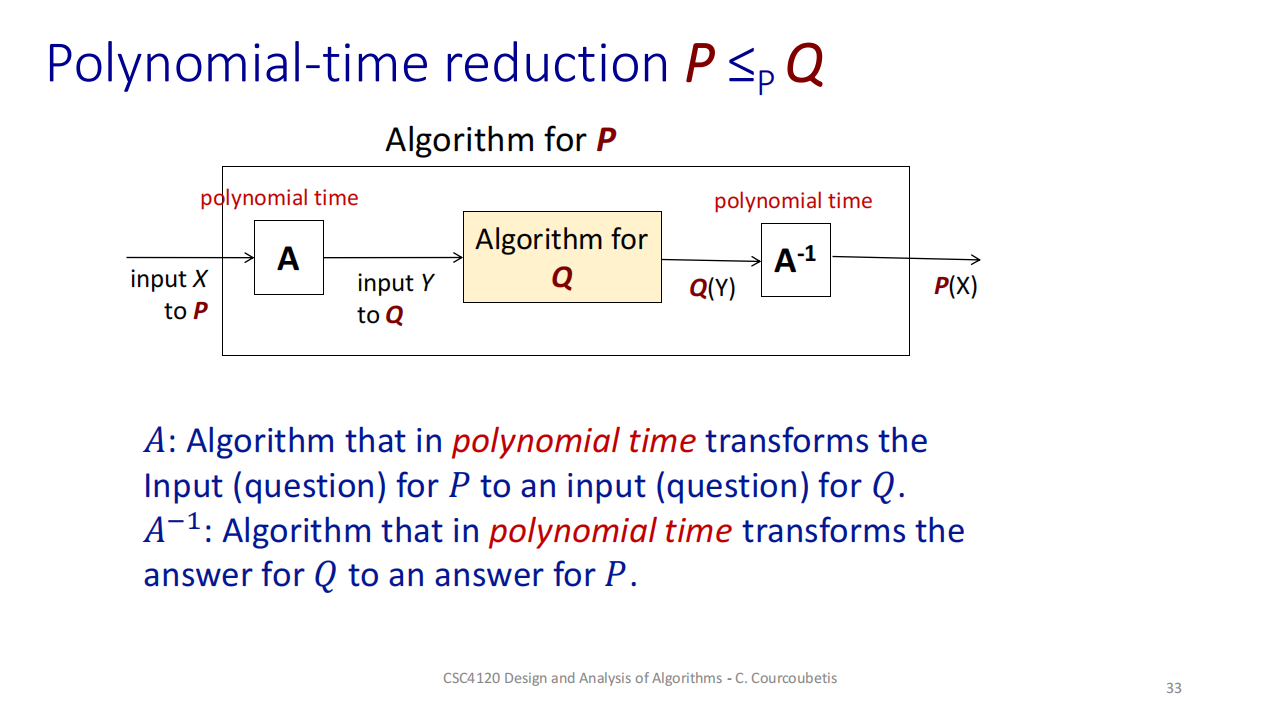
🟦 标题:Polynomial-time reduction P ≤ₚ Q
也就是我们讲的:
把一个问题 P “变成” 问题 Q 来求解
📊 图的流程结构说明:
input X (P的问题输入)
↓
A:多项式时间变换器(把 X 转成 Y)
↓
input Y(Q的问题输入)
↓
算法 for Q(假设我们会解 Q)
↓
Q(Y):Q 的输出
↓
A⁻¹:再把 Q 的输出转成 P 的输出
↓
P(X):最终得到 P 的输出
🧱 图中每一块解释:
🟨 A:
A:Algorithm that in polynomial time transforms the Input (question) for P to an input (question) for Q.
翻译:
算法 A 是一个多项式时间过程,
把“P 的输入”变成“Q 的输入”
🧠 类比:P 是中文题目,A 把它翻译成 Q 能懂的英文题
🟨 算法 for Q:
你可以把它看成“Q 的解法”或者一个神灯。
我们现在是想:如果我有这个 Q 的能力,我能不能用它来解决 P?
🟨 A⁻¹:
A⁻¹: Algorithm that in polynomial time transforms the answer for Q to an answer for P.
翻译:
算法 A⁻¹ 是个多项式时间过程,
把 “Q 的答案” 再翻译成 “P 的答案”
🧠 类比:你把神灯的英文回答翻译回中文,拿来交作业
🔴 总结这个图的核心意义:
如果你能:
把任何 P 的输入 X 变成 Q 的输入 Y(多项式时间)
用 Q 的算法得出 Q(Y)
再把 Q(Y) 变成 P(X) 的答案(多项式时间)
那么你就“等价地”解出了 P!
🧠 通俗类比总结:翻译机归约法
| P 问题 | 中文难题,不知道怎么解 |
|---|---|
| A 算法 | 把中文题翻译成英文题(Q 的格式) |
| Q 问题 | 英文题,神灯能秒解 |
| A⁻¹ 算法 | 把英文答案翻译回中文答案 |
所以我们说:
✅ “P 归约到 Q” → Q 解决得好,也等于能解决 P
❌ Q 不归约到 P,因为翻译是单向的!
🧾 重要结论:
归约的核心目标是:传递困难度
如果 P ≤ₚ Q,
那你有能力解决 Q,就等于你也能解决 P。
所以我们说:
Q 至少不比 P 容易,Q “更难”
如果你理解了这张图,那你就已经掌握了:
-
什么是 p-归约
-
为什么它能传递“困难”
-
在 NP-complete 证明中我们要干啥

✅ 将已知难题 Partition 归约到 Knapsack
从而说明:Knapsack 也很可能是一个困难问题。
下面是详细讲解 + 通俗翻译。
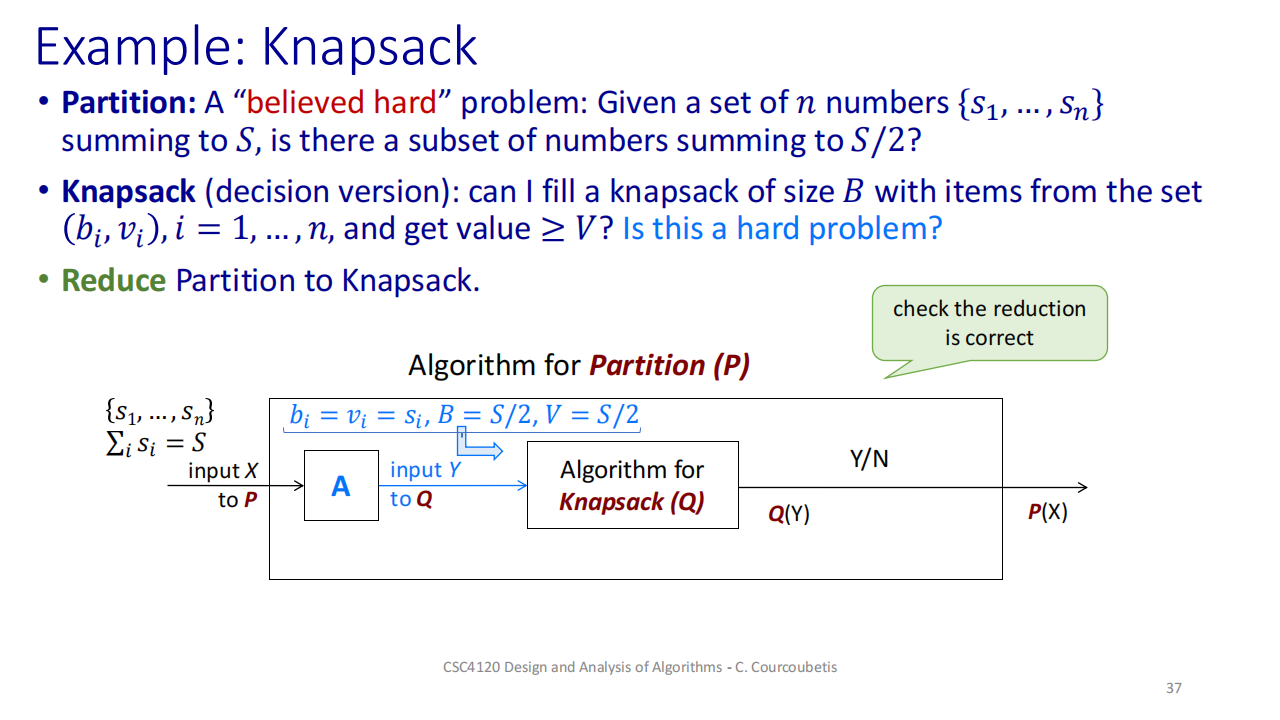
📌 Slide 标题:Example: Knapsack(背包问题)
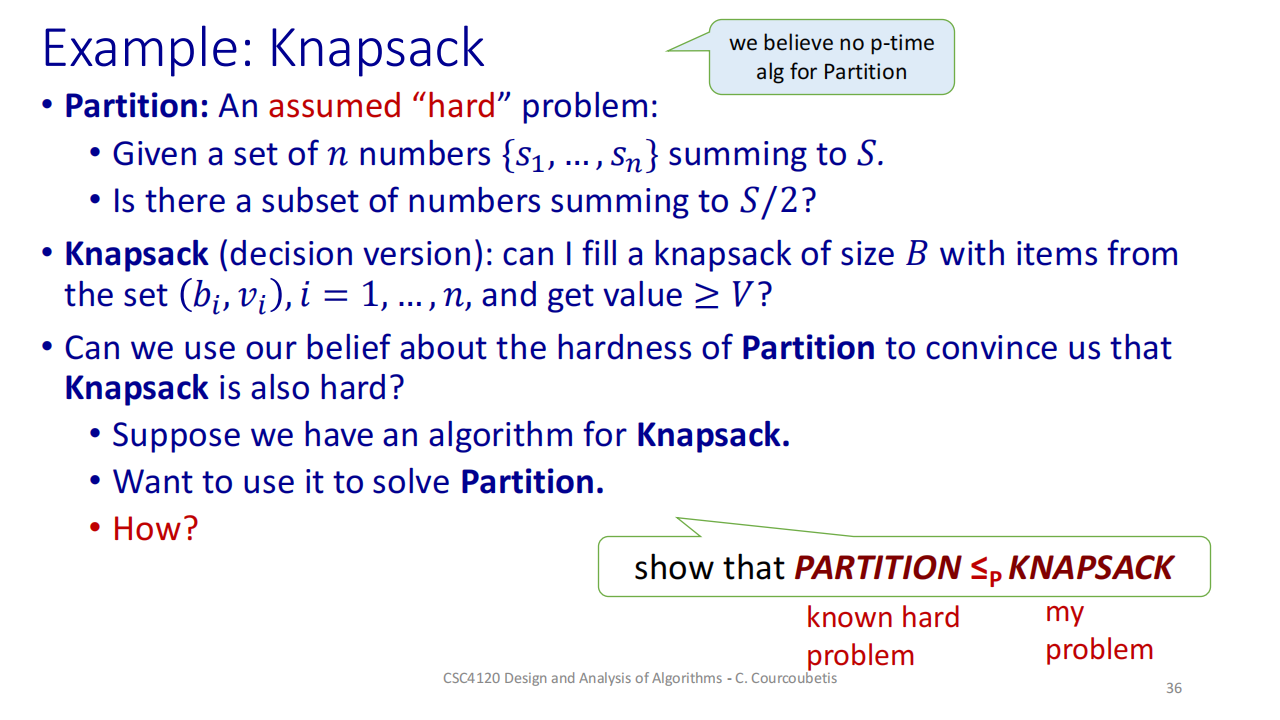
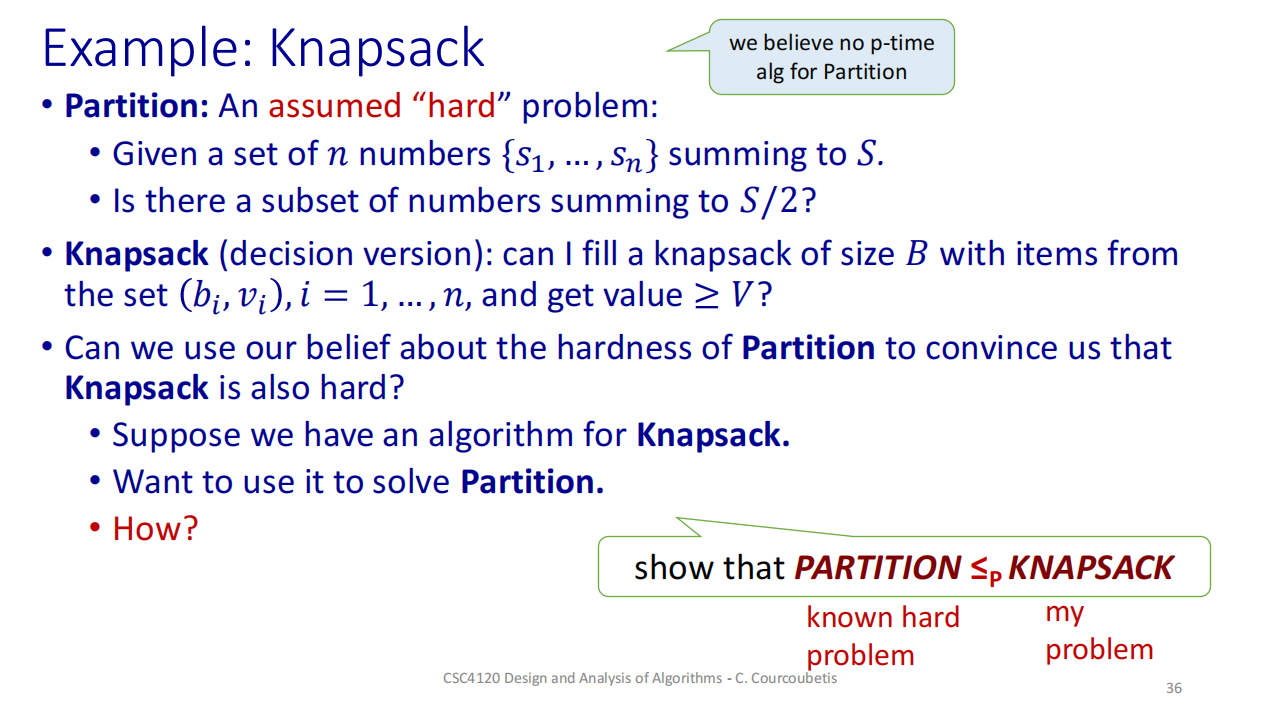
🧩 Step 1:已知困难问题 Partition(划分问题)
Partition:一个假设的“困难”问题:
-
给你一组数字 {s₁, ..., sₙ},它们总和是 S。
-
问:能不能把它们分成两组,每组和为 S/2?
🔴 这叫做 Partition Problem(划分问题)。
🧠 它是经典的 NP-complete 问题之一。
🎒 Step 2:我们关心的问题 Knapsack(决策版背包问题)
Knapsack(决策版)问的是:
-
给定一个容量为 B 的背包
-
给你 n 个物品,每个物品有重量 bᵢ 和价值 vᵢ
-
问:能不能选择一些物品装进背包,使得价值 ≥ V?
🎯 我们的目标是:
能不能用 Partition 的难度,来说明 Knapsack 也难?
❓ 怎么办?
假设你已经有一个算法能解 Knapsack
我想用它来“顺带”解 Partition
如果能做到 ⇒ Knapsack 至少和 Partition 一样难!
✅ 要做的就是:
show that
[
\texttt{PARTITION} \leq_p \texttt{KNAPSACK}
]
也就是 把 Partition 转换成 Knapsack 的形式,然后调用神灯(Knapsack 解法)解决。
🧠 这就是我们之前学的多项式时间归约的本质应用!
🧠 通俗总结:
| 项 | 含义 |
|---|---|
| Partition | 已知困难的 NP 完全问题 |
| Knapsack | 我想证明它也很难 |
| 想法 | 如果你能解 Knapsack,我就能顺带解 Partition |
| 做法 | 设计一个多项式时间转换,让 Partition 问题变成 Knapsack 问题输入 |
| 结果 | 如果 Knapsack 有多项式时间解,那 Partition 也有(矛盾) ⇒ Knapsack 很可能也很难 |
💡 小贴士记忆口诀:
要证明某个问题 Q 很难,
就要从一个已知难的问题 P 出发:
P \leq_p Q
]
Q 至少不比 P 容易 ⇒ Q 也很难。
-
其中 Partition 是我们已知很难的问题(🟥 known hard)
-
Knapsack 是我想证明也很难的问题(🟧 my problem)



🔹 “We now have an algorithm for Partition:”
我们现在拥有了一个 Partition 问题的算法(虽然它是“伪造”的):
这是怎么做到的?
✅ 步骤 1:把 Partition 的输入转为 Knapsack 的输入
Do a polynomial amount of work to turn the input to Partition into an input to Knapsack.
也就是说:我们用归约算法 A,将 {s1,...,sn}变成:
-
Knapsack 的物品集合(b_i = v_i = s_i)
-
容量 B=S/2,目标价值 V=S/2
这个转换是多项式时间完成的。
✅ 步骤 2:调用“假设存在”的 Knapsack 算法
Call the hypothetical Knapsack algorithm.
这一步是假设你有一个解 Knapsack 的神灯,只要你给它输入,它就告诉你答案(YES or NO)。
✅ 步骤 3:把 Knapsack 的答案“翻译回” Partition 的答案
Do a polynomial (actually constant) amount of work to turn the Knapsack answer into a Partition answer.
这一步很简单:直接判断 Knapsack 有没有得到“价值恰好为 S/2S/2”的结果。
🔴 小结(关键判断):
If Knapsack result is S/2 (i.e., YES), return YES. Else, return NO.
Knapsack 答案 YES ⇨ Partition 有解
Knapsack 答案 NO ⇨ Partition 无解
✅ 推论逻辑(这是关键)
“If there is a polynomial-time algorithm for Knapsack, get one for Partition.”
如果 Knapsack 有一个多项式算法,我们就能构造出一个解决 Partition 的多项式算法。
🚨 但 Partition 是 NP-complete,我们相信没有多项式时间算法能解决它
“Since we believe no poly-time algorithm for Partition, conclude none exists for Knapsack.”
所以我们就可以反过来推断:
Knapsack 也不可能有多项式时间算法
⇨ 它也属于“困难”问题(NP-hard)
✅ 通俗总结:
| 步骤 | 内容 |
|---|---|
| 构造归约 | Partition 输入 → Knapsack 输入(用归约算法 A) |
| 调用“神灯” | 假设 Knapsack 有算法,用它来解 |
| 答案转换 | Knapsack YES ⇒ Partition YES |
| 推理闭环 | Knapsack 有算法 ⇒ Partition 有算法 |
| 结论 | 但我们相信 Partition 没有 ⇒ Knapsack 也不该有 ✅ |
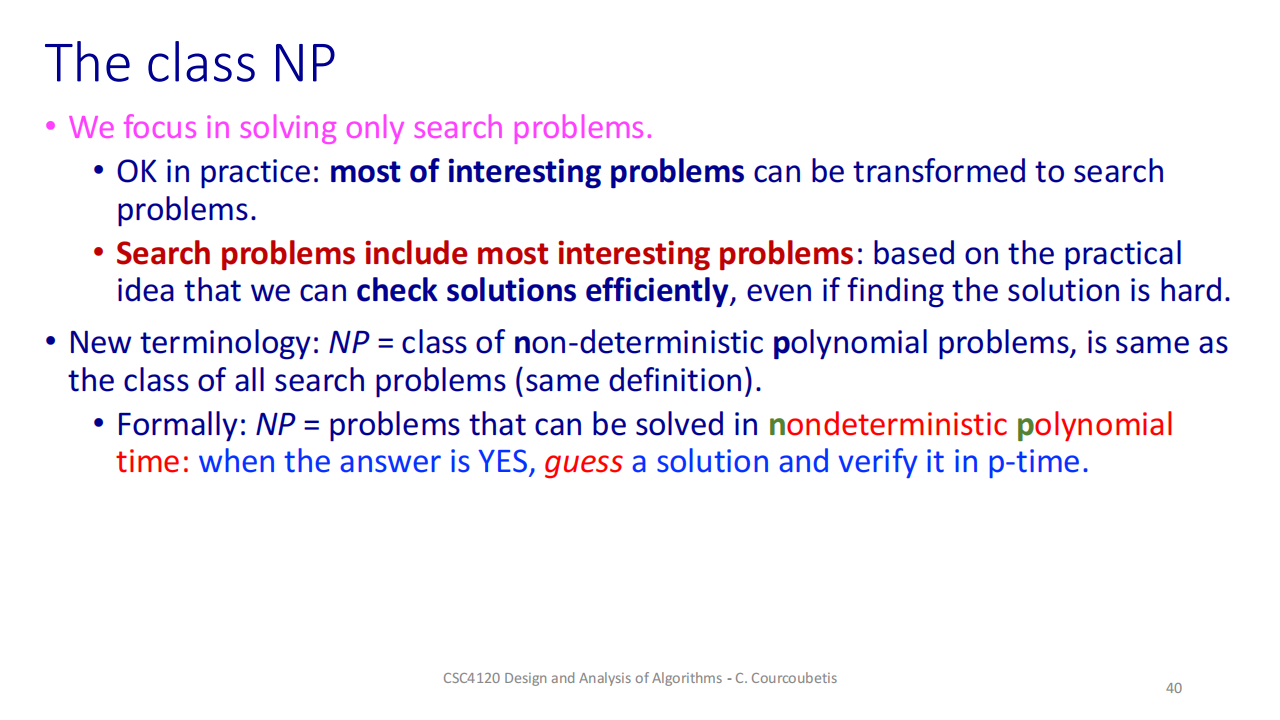
🧩 主题:The class NP
✳️ 粉色句子:
We focus on solving only search problems.
我们现在只关注搜索问题(search problems)
✅ 为什么可以只看搜索问题?
Most of interesting problems can be transformed to search problems.
几乎所有我们关心的“有趣问题”都可以转成搜索问题。比如:
决策问题:“图中是否存在哈密顿环?”
搜索问题:“图中那个环具体是哪几个点?”
两者之间可以转换。
🔴 为什么搜索问题重要?
Search problems include most interesting problems
搜索问题覆盖了几乎所有我们在意的计算难题。We can check solutions efficiently, even if finding them is hard.
虽然“找出解”可能很难,但“验证一个给定解是否正确”通常是简单的(多项式时间完成)。
📘 重点术语:NP 的定义
NP = class of non-deterministic polynomial problems
NP 指的是“非确定性多项式时间”问题类。也就是说:
📜 正式定义:
NP = 所有这样的问题:
如果答案是 YES,我们可以:
猜一个解(non-deterministically guess)
然后在多项式时间内验证这个解是否正确 ✅
🤔 更通俗理解:
想象你在解谜游戏:
“这个图有没有一个哈密顿路径?”
你不会马上能找到,但如果有人告诉你一条路径(即**“猜”一个解**),
你可以在几秒钟内检查是否每个点走了一次 → 验证是否成立
那这个问题就在 NP 里!
🎓 小结一下:
分类 意思 P 可以“快找到解”的问题 NP 如果告诉你解,你能快验证是否对的问题
🎯 后续要走的路线
现在你已经知道:
什么是 NP
什么是归约
怎样判断一个问题是不是“至少和已知难问题一样难”
接下来就会讲:
NP-complete(NP 完全问题)
如何从一个 NP 完全问题出发,归约出一大堆 NP 难题

| 内容 | 解释 |
|---|---|
| 什么是“hard” | 可以通过归约从已知 hard 问题得到 |
| NP-complete 是谁 | 一群最难的 NP 问题,彼此等价 |
| 怎么证明一个问题也很难? | 把 NP-complete 的问题归约到它 |
🧠 核心概念对比:NP-hard vs NP-complete
✅ 什么是 NP-hard?
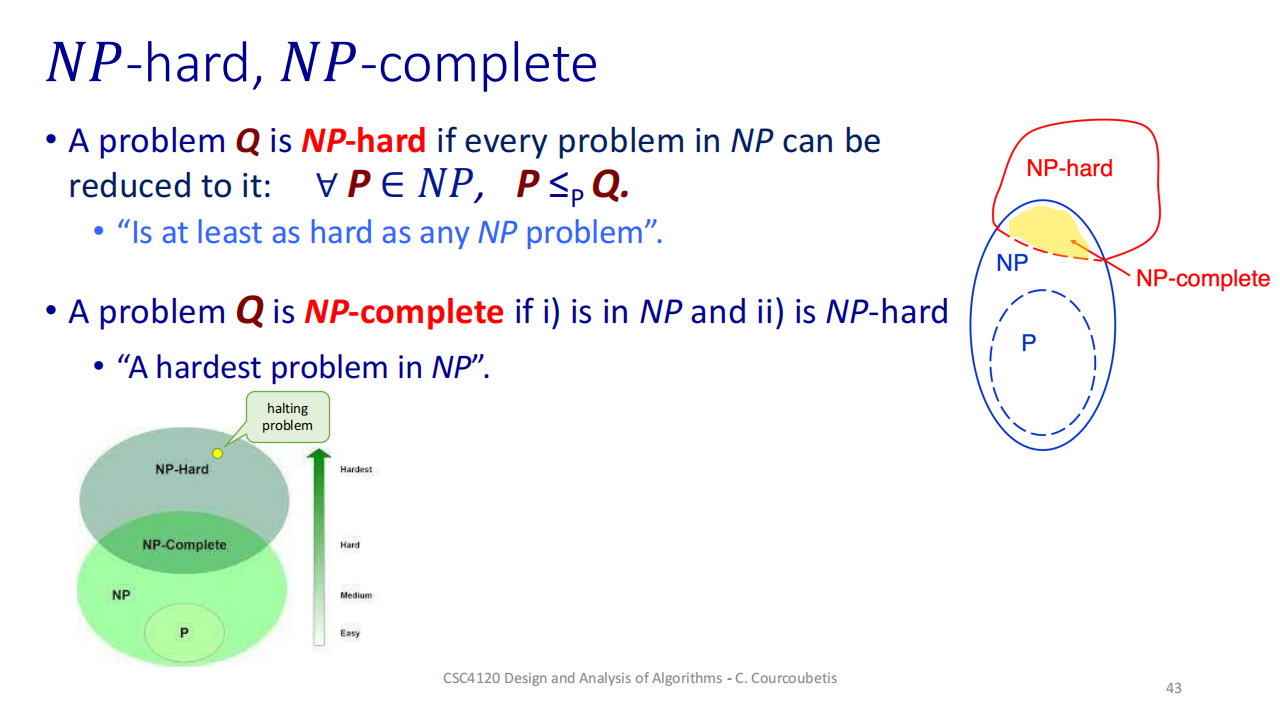
Q 是 NP-hard
如果:NP 中的所有问题都能多项式时间归约到 Q:
💡直白解释:
-
Q 至少和所有 NP 问题一样难,甚至可能更难!
-
即使 Q 本身 不在 NP 内部(比如不可验证),也可以是 NP-hard。
📌 例子:Halting problem(停机问题)
-
是 NP-hard(因为比所有 NP 问题都难),
-
但它不在 NP(根本就不可判定,不可验证)。
✅ 什么是 NP-complete?
Q 是 NP-complete(NP完全)
如果:
-
Q 在 NP 中(也就是结果可验证)
-
Q 是 NP-hard
💡直白解释:
-
它是 NP 中最难的那一批问题
-
如果你能在多项式时间内解决 Q,那你就能解决所有 NP 问题了!
-
所以,我们才说 NP-complete 是“一类最难的 NP 问题”。
📌 经典例子:SAT, 3-SAT, CLIQUE, HAMILTONIAN CYCLE, PARTITION…
✅ 总结对比表
| 概念 | 要求在 NP 里? | 比所有 NP 问题至少一样难? | 典型例子 |
|---|---|---|---|
| NP-complete | ✅ 是 | ✅ 是 | SAT, 3-SAT, CLIQUE, etc. |
| NP-hard | ❌ 不一定 | ✅ 是 | Halting problem, TSP优化版等 |
📌 为什么重要?
如果你能找出一个 NP-complete 问题的多项式时间算法,
那么:所有 NP 问题都能在多项式时间内解决 —— 也就是 P = NP!
✅ 最终结论:
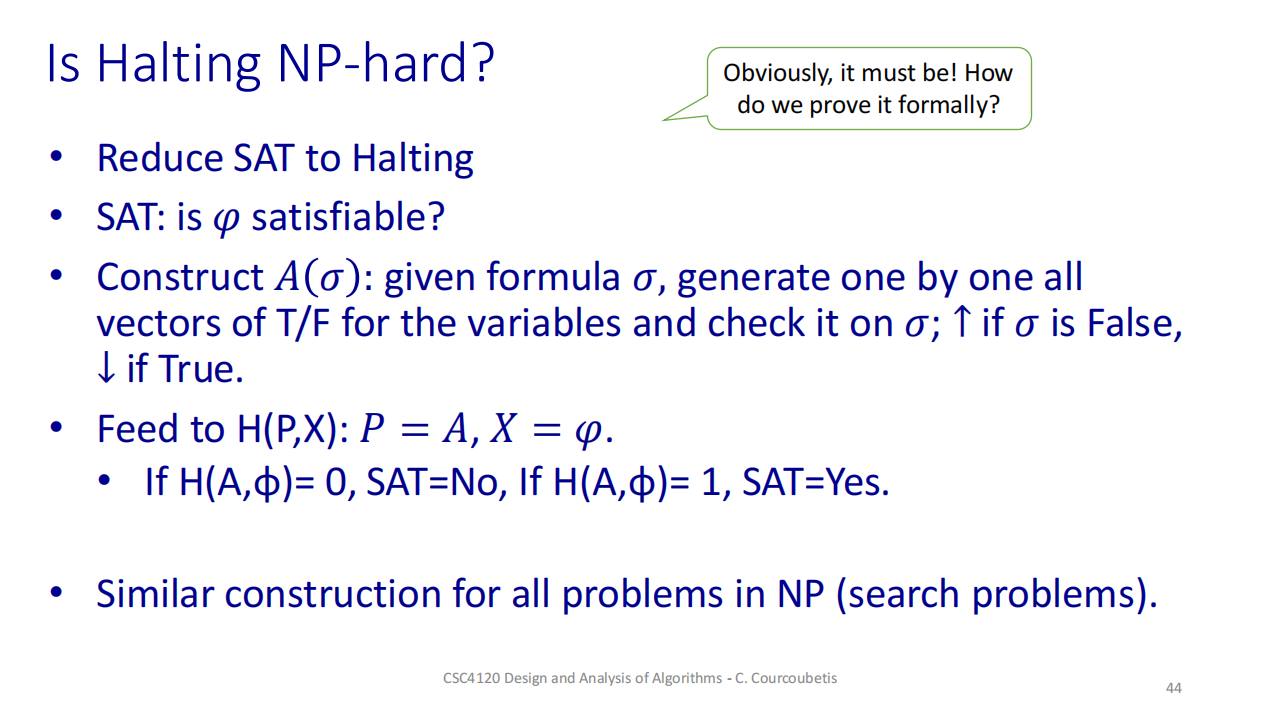
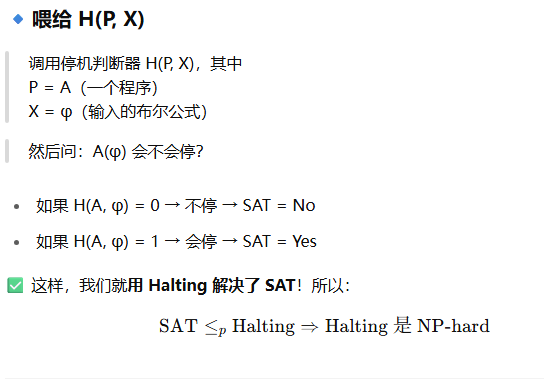
Halting 是 NP-hard,
不是因为 Halting 用了 SAT 的思路,
而是因为:
我们把 SAT 转换成了 Halting 来解决,
所以 Halting 至少和 SAT 一样难。
🔁 关键点:我们是把 SAT 归约到 Halting!
意思是:我们利用「解决 Halting 的方法」,来「间接解决 SAT」。
✅ Step 1:
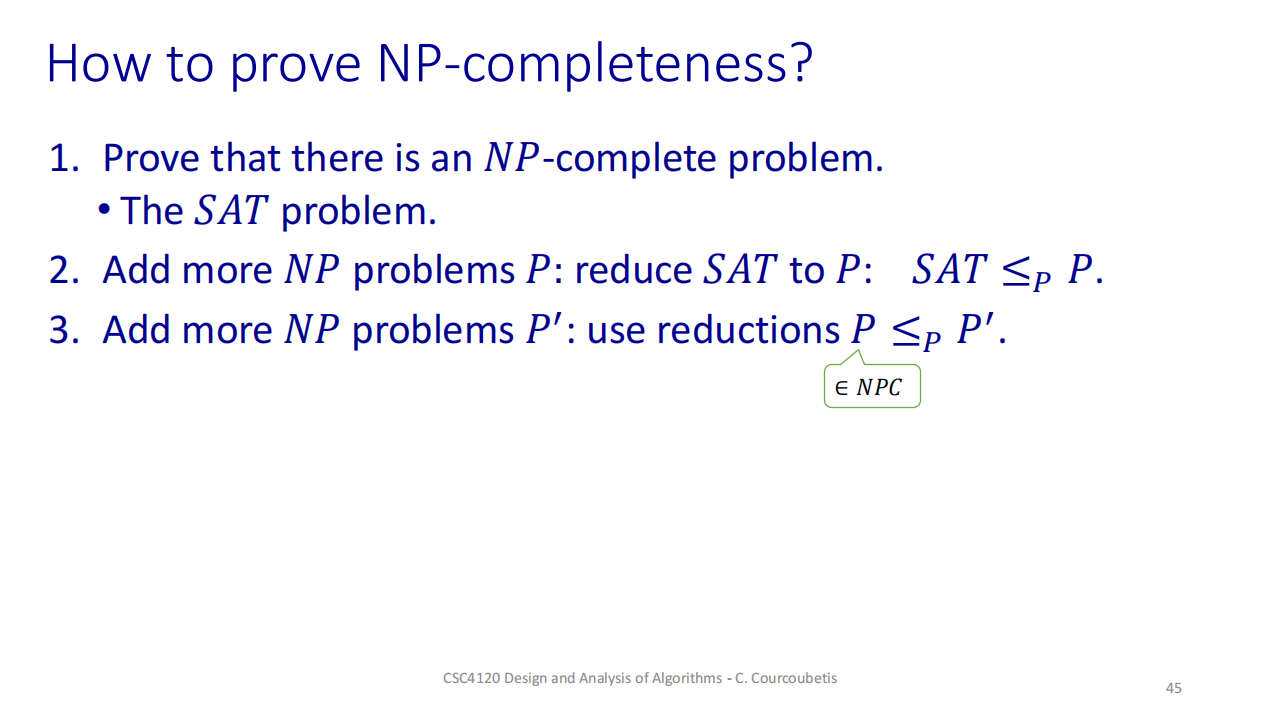
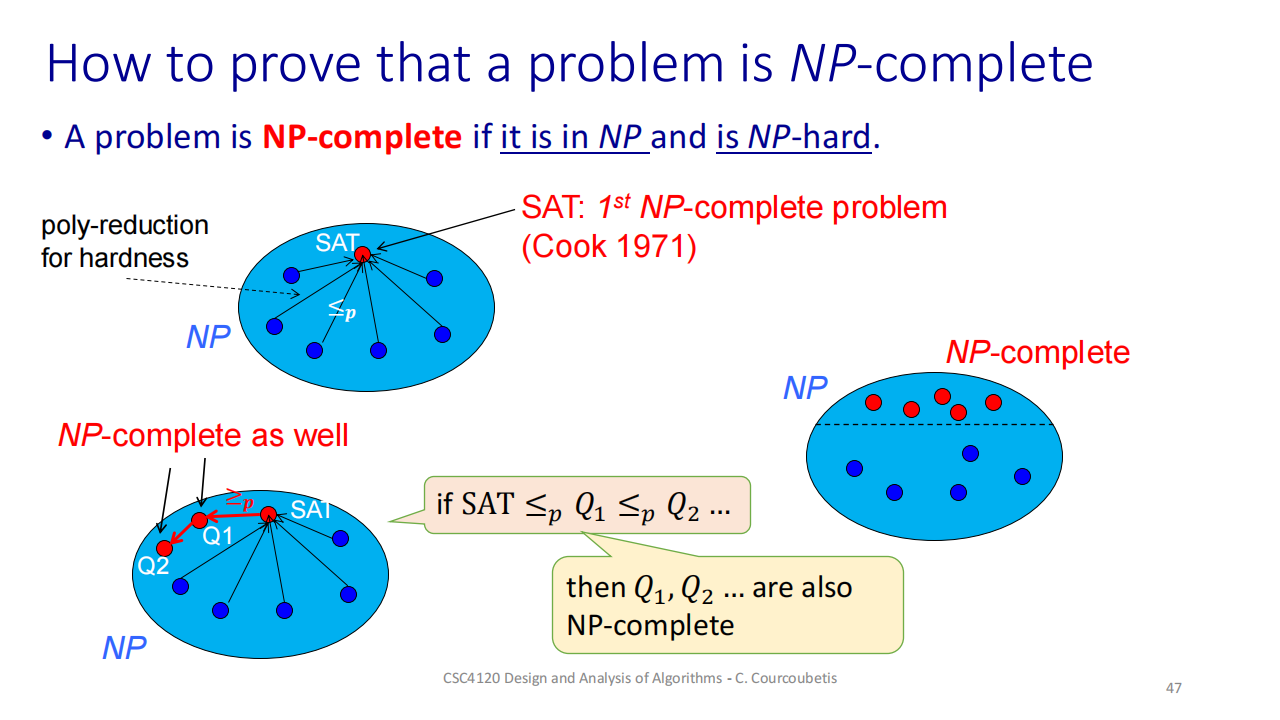
Prove that there is an NP-complete problem.
➤ The SAT problem.
📖 中文翻译:
首先,要证明存在某个问题是 NP-complete。
这个“第一个”问题,就是著名的 布尔可满足性问题(SAT),由 Cook-Levin 定理于 1971 年证明。
📌 通俗解释:
SAT 就是 NP-complete 的“祖师爷”。
所有后来的 NP-complete 问题,都是从它“传宗接代”而来。
📖 中文翻译:
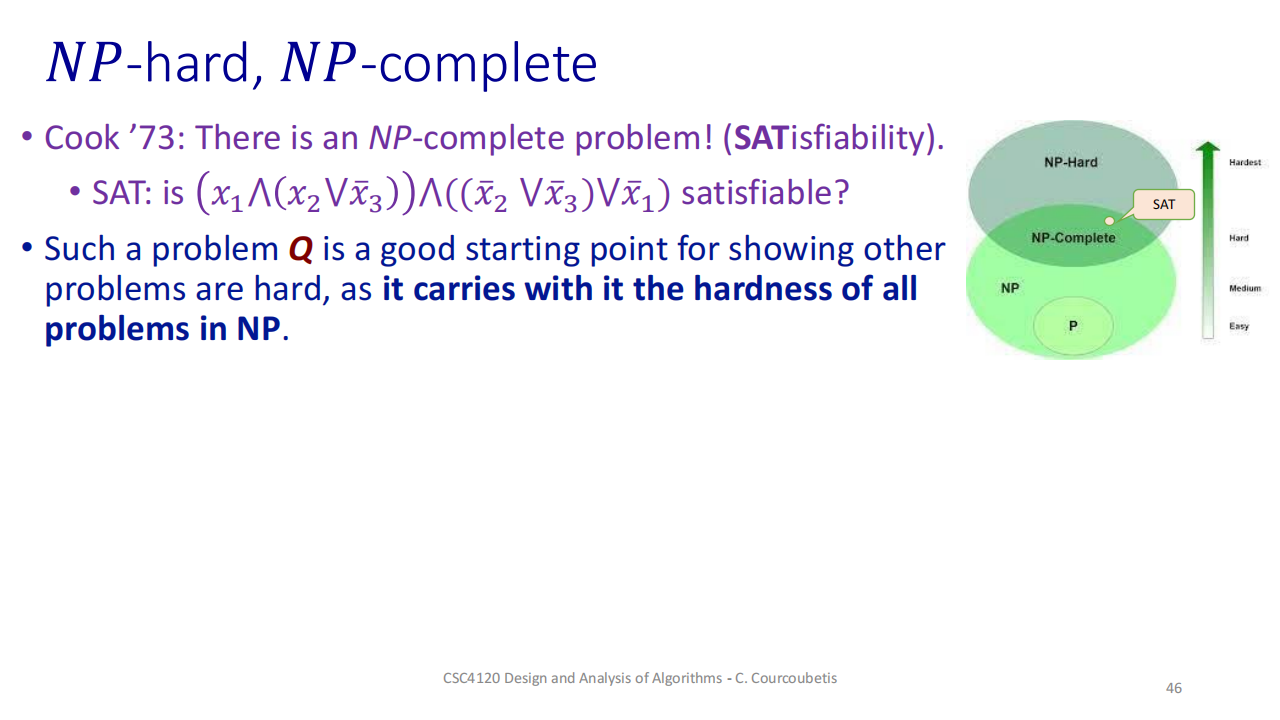
Cook 1973 年证明了:存在 NP-complete 问题! 这个问题就是 SAT(可满足性)。
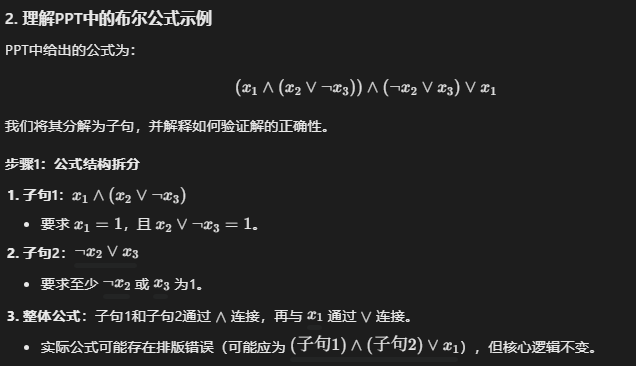
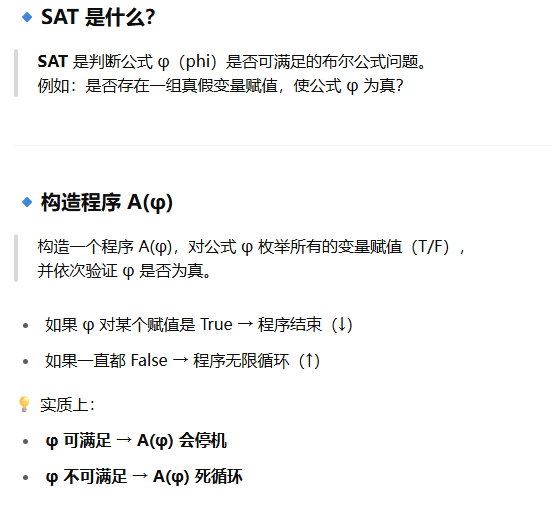
例如这个布尔表达式是否存在一种变量赋值,使得整体成立?
📌 通俗解释:
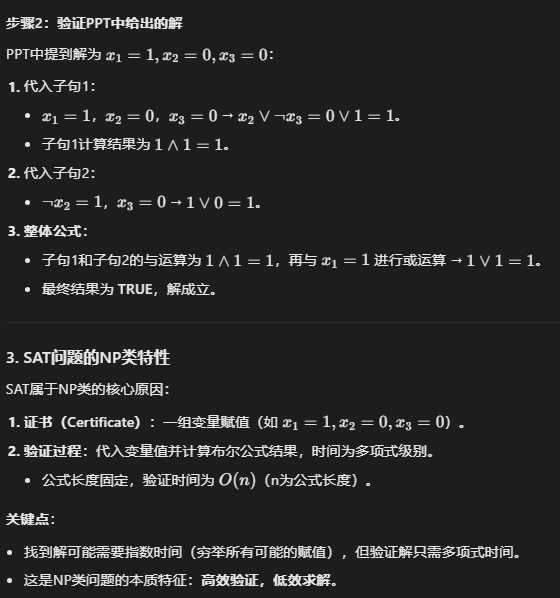
SAT 是一个给定布尔公式,问“有没有一种真/假赋值让它整体为真?”
Cook-Levin 定理告诉我们:这是第一个已知的 NP-complete 问题,也就是说:
❗ SAT 是所有 NP 问题中最难的之一。
📖 中文翻译:
像 SAT 这样的 Q 问题,是一个很好的出发点,用来证明别的问题也很难,
因为它“携带了 NP 所有问题的难度”。
📌 通俗解释:
你可以把 SAT 想成一个“携带 NP 难度的炸弹”,
你只要把它“炸到”另一个问题身上(即 SAT ≤ₚ 你的问题),
那么你就能说:“我的问题也很难”!
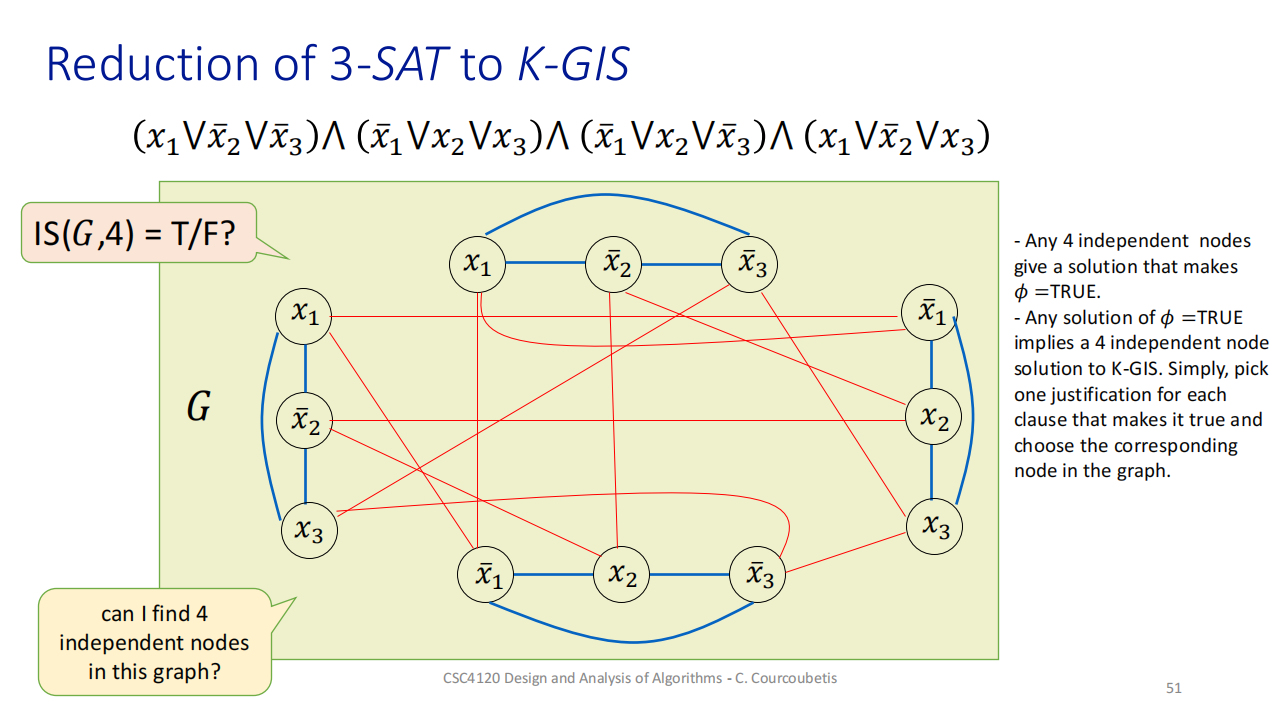
✅ 为什么这个归约成立?
-
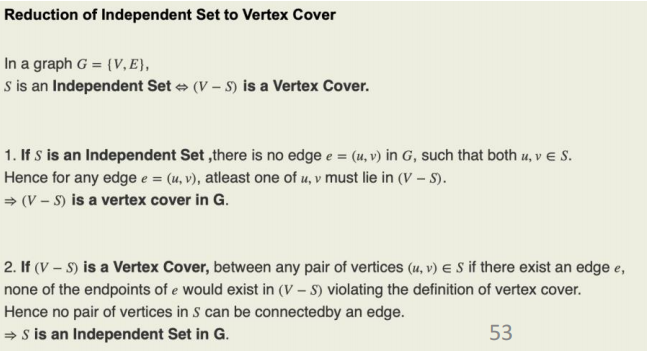
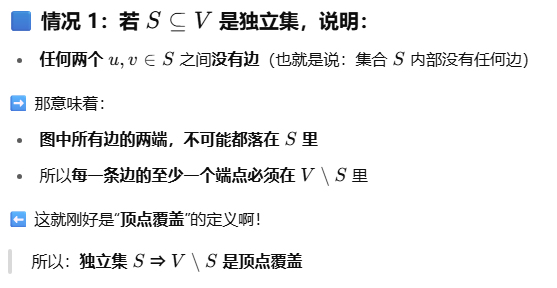
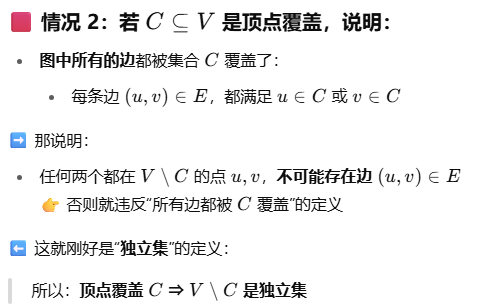
✔ 归约是“等价”的 —— 图中有独立集 ⇔ 公式可满足
-
✔ 构造的图大小是多项式级别的(和公式一样大)
-
✔ 所以我们完成了一个多项式归约


🟦 1. 有很多问题是 NP-complete
这些问题已经被证明了都很难(即:只要有一个能在多项式时间内解决,其他所有也能被解决):
包括:Clique、Independent Set、TSP、Graph Coloring、Hamiltonian Path、Longest Path、Vertex Cover、Subset Sum、Integer Programming 等等…
🟨 它们统称为:
NP 完全问题(NP-complete):
是 NP 类中最难的那些问题。
🟦 2. 科学家找了 50+ 年:
过去 50 多年来,科学家:
-
用尽各种办法尝试设计出一个多项式时间算法解决其中某一个问题
-
但 全部失败了
所以我们“强烈怀疑”这些问题根本没有多项式时间解法。
🟩 3. 这就是著名的 “P vs NP” 问题:
有没有可能:NP 中的所有问题,其实都有多项式时间算法?
换句话说,是不是其实:P = NP?
-
如果是,那这些 NP-complete 问题应该都能在多项式时间内解决
-
如果不是,那就永远没法“高效”求解这些问题(只能猜然后验证)
🟨 4. 这不是随便的问题!
这是被 Clay 数学研究所列为 “千禧年七大数学难题” 之一
💰 奖金 $1,000,000(至今没人能解出来)
✅ 通俗翻译总结:
| 正式说法 | 通俗说法 |
|---|---|
| “P vs NP 问题” | “你猜得到的东西,能不能也算得快?” |
| “NP-complete 问题” | “最难的那一批猜谜题” |
| “我们找不到多项式算法” | “全世界的人都猜不到怎么高效做” |
| “都互相归约了” | “它们能相互‘变形’,本质一个难度” |
✅ 通俗解释总结
-
P = NP?没人知道。
-
所以 A / B 都选不了,这题根本“不能答”。
-
这页是老师用幽默方式总结:我们走到了理解的前沿。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









