







首先用cubemx配置基础外设(STM32G431RBT6)
RCC:
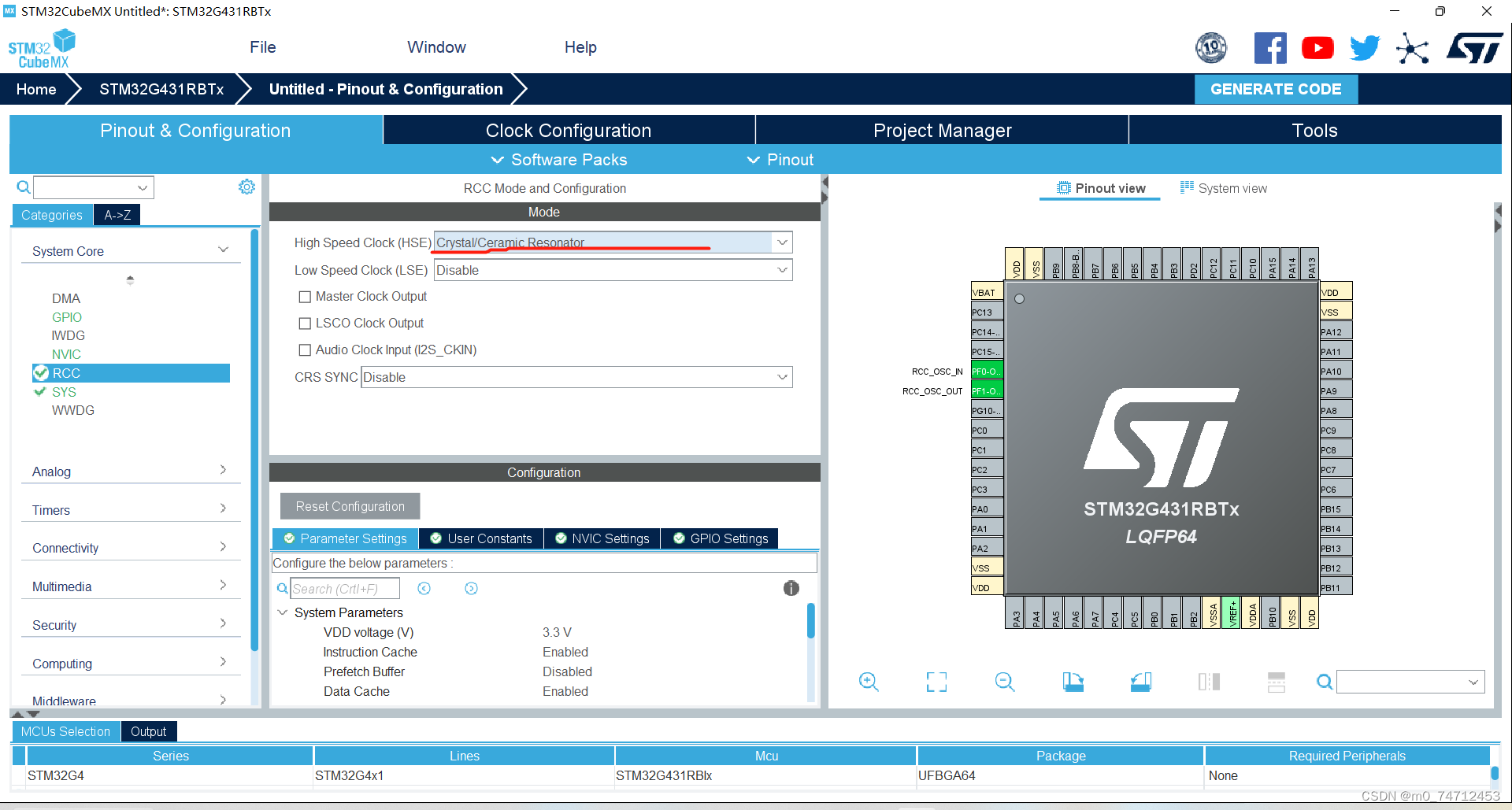
GPIO:包括按键(PB0,PB1,PB2,PA0全部配置输入),LED(PC8~PC15和PD2全部配置输出)
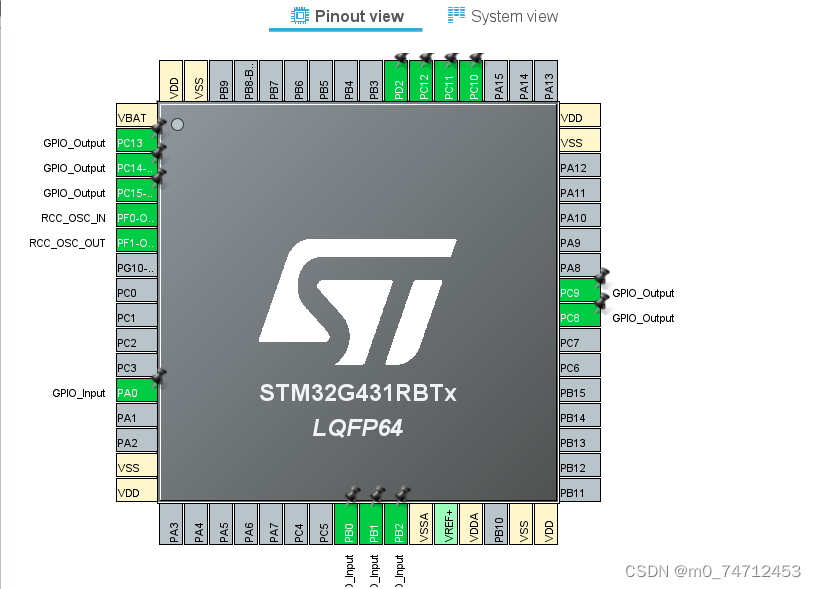
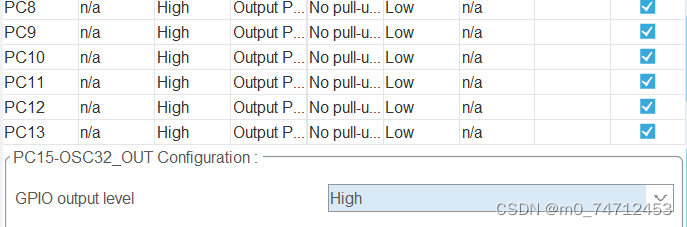
把PC8~PC15设置输出高电平
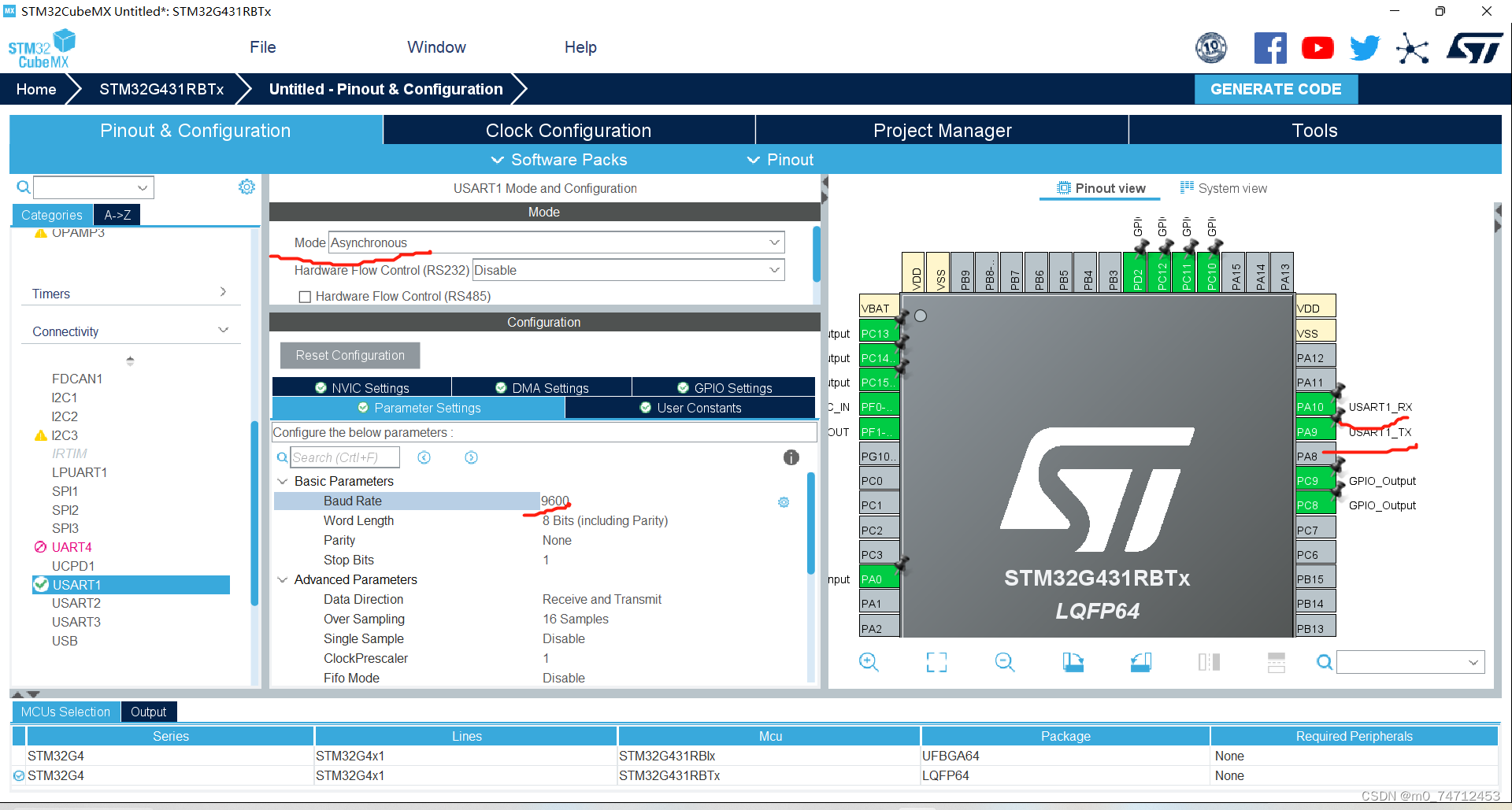
UART:PA9和PA10
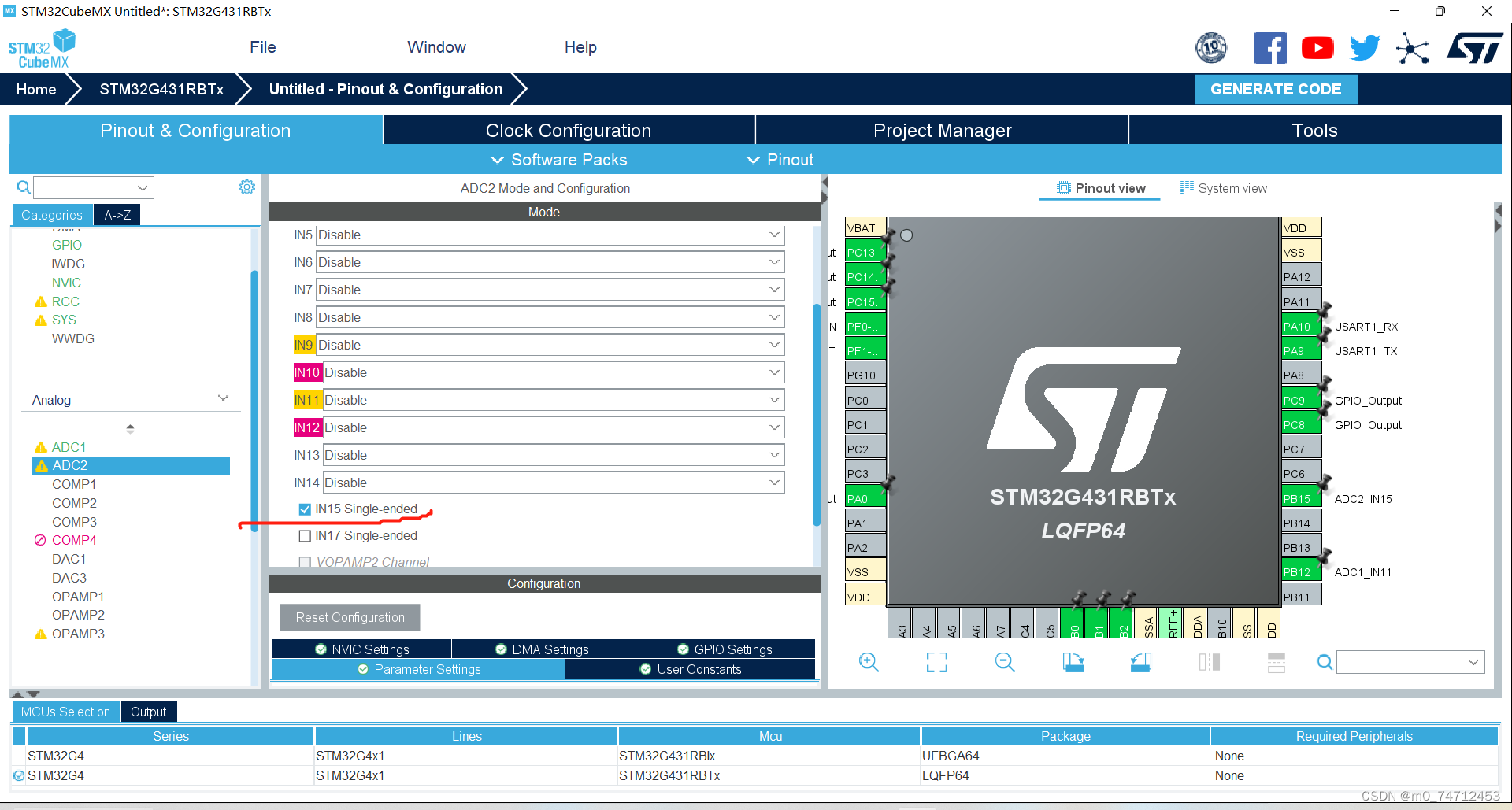
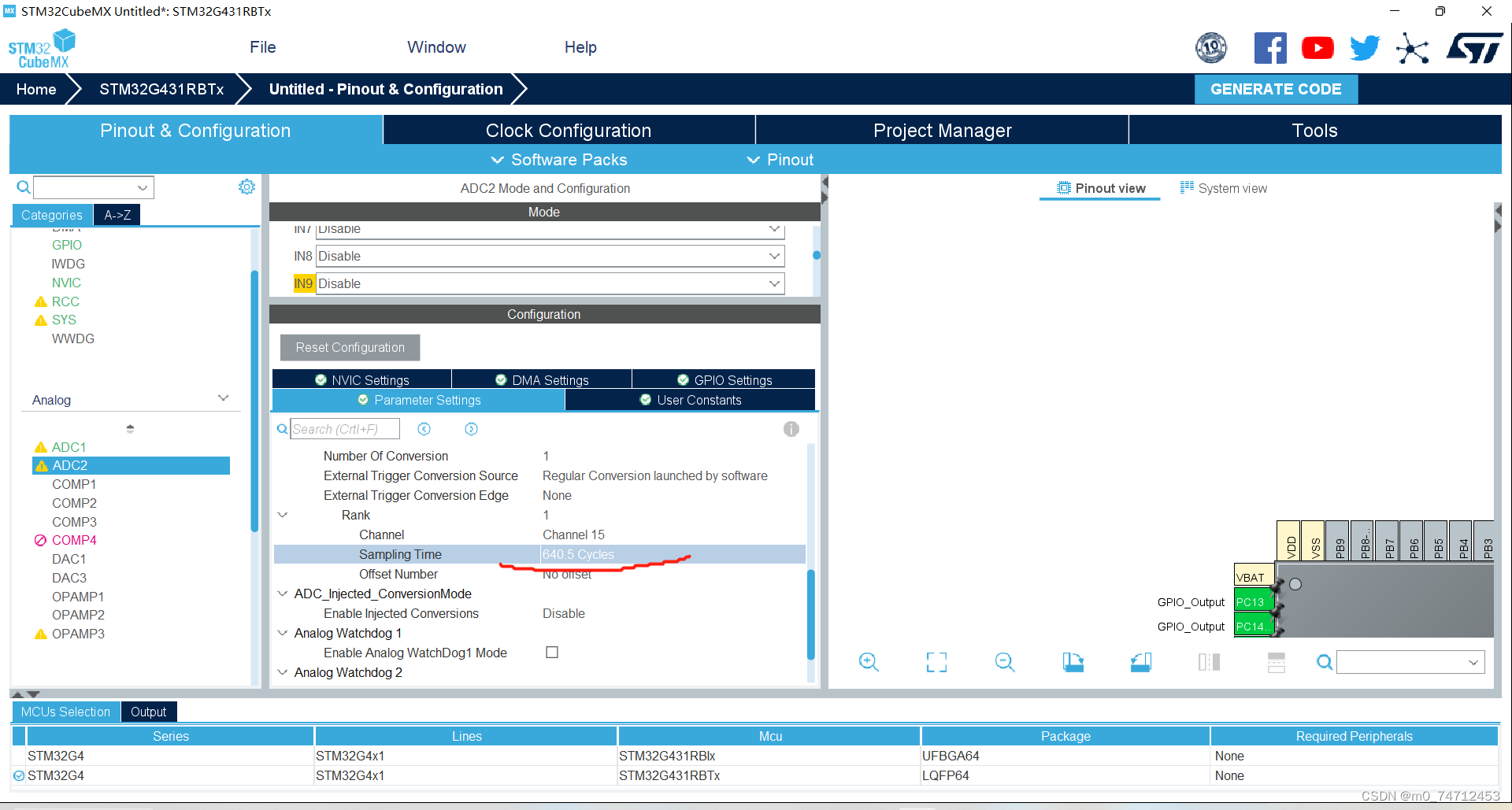
ADC:ADC1和ADC2用PB12 PB15

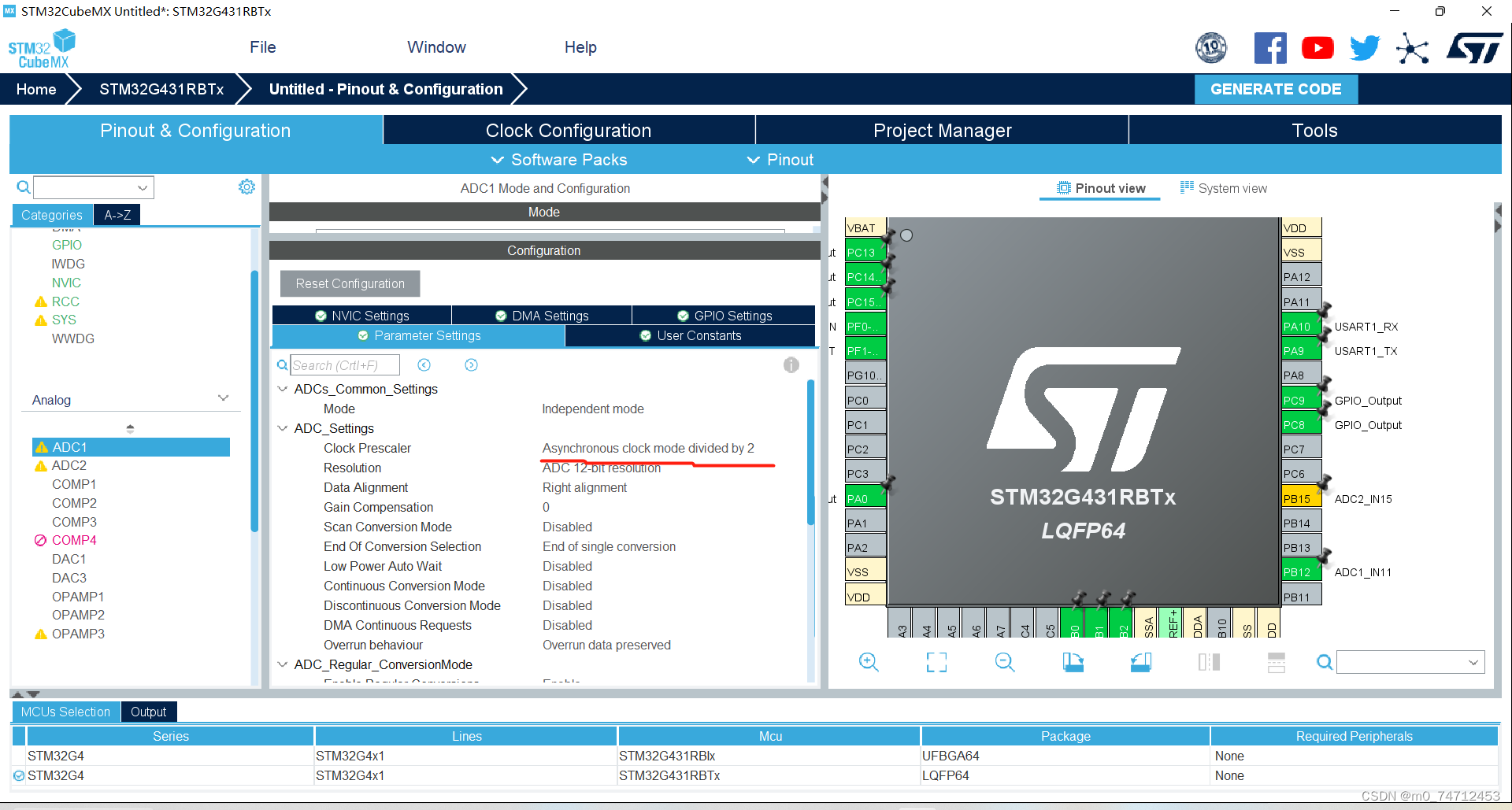

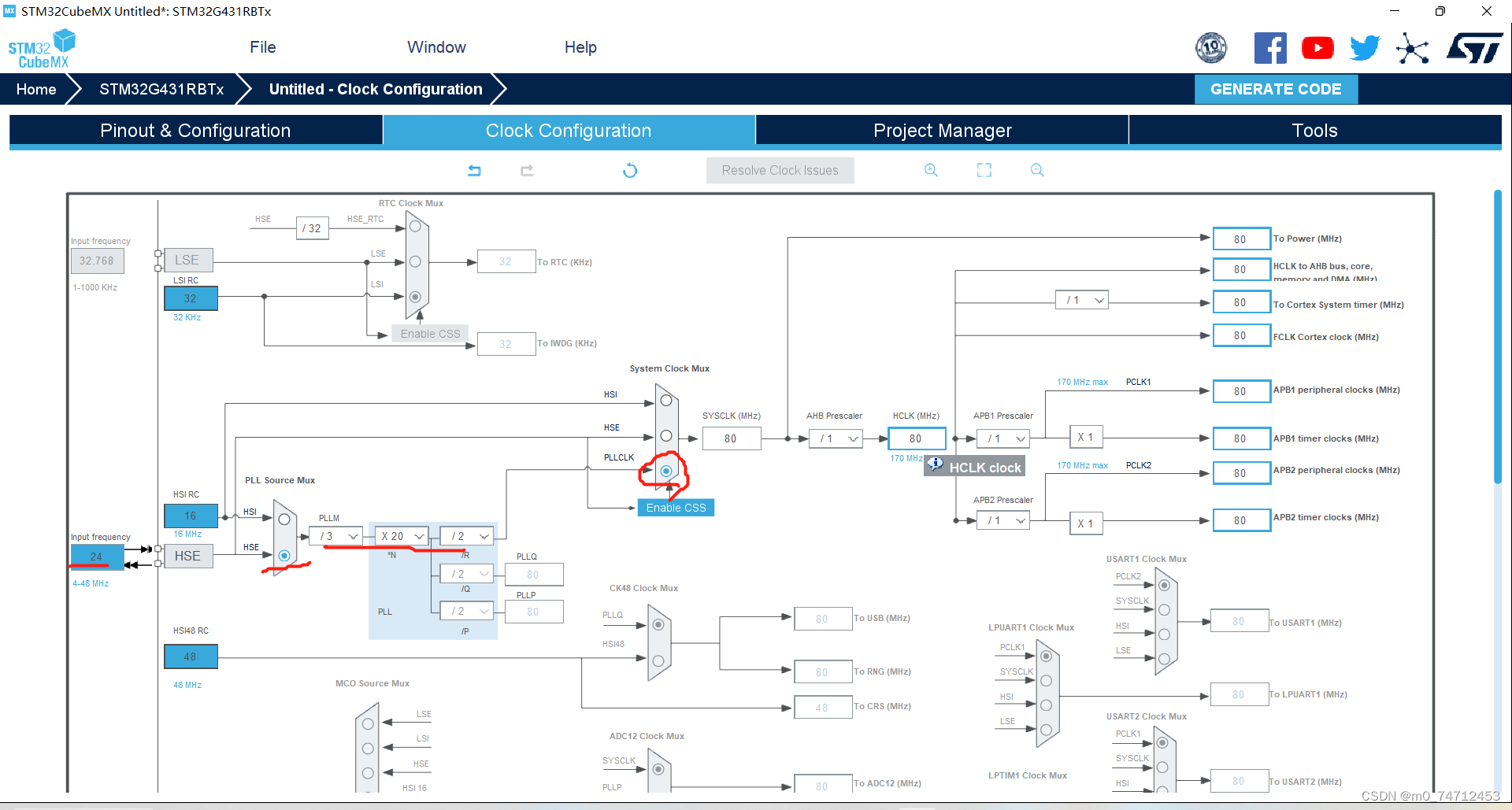
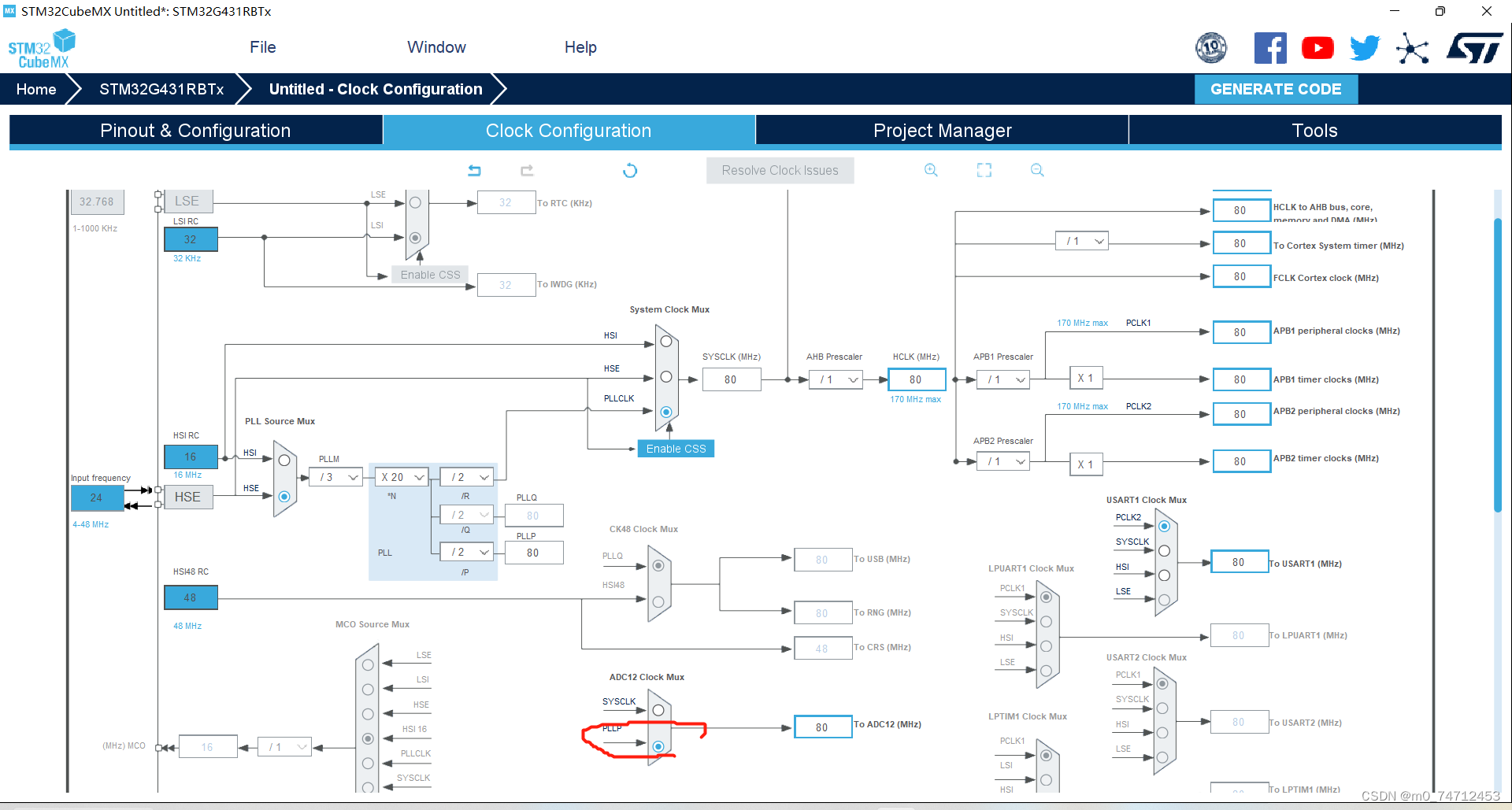
 时钟修改一下
时钟修改一下
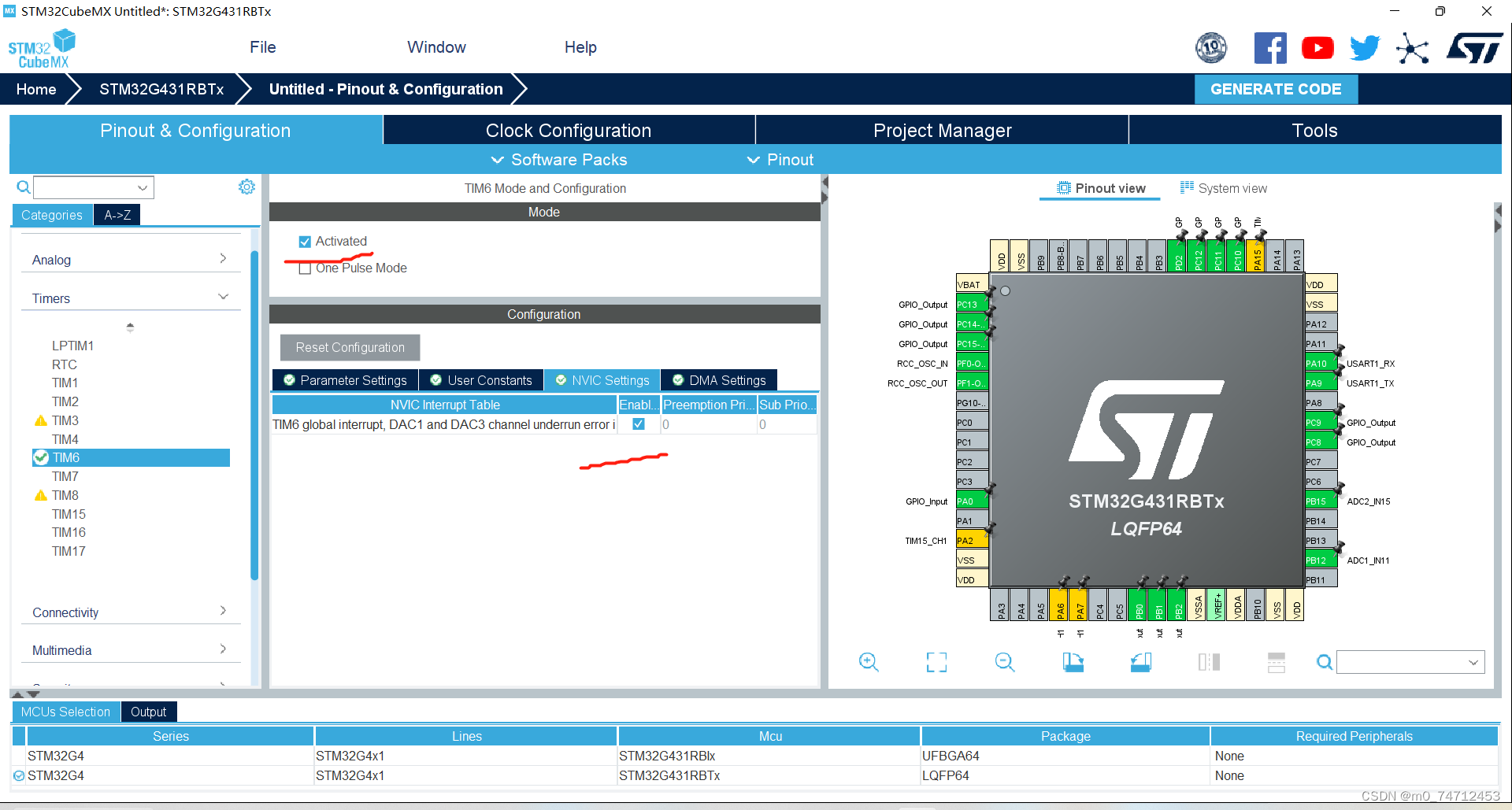
TIM:
先配基本定时器TIM6

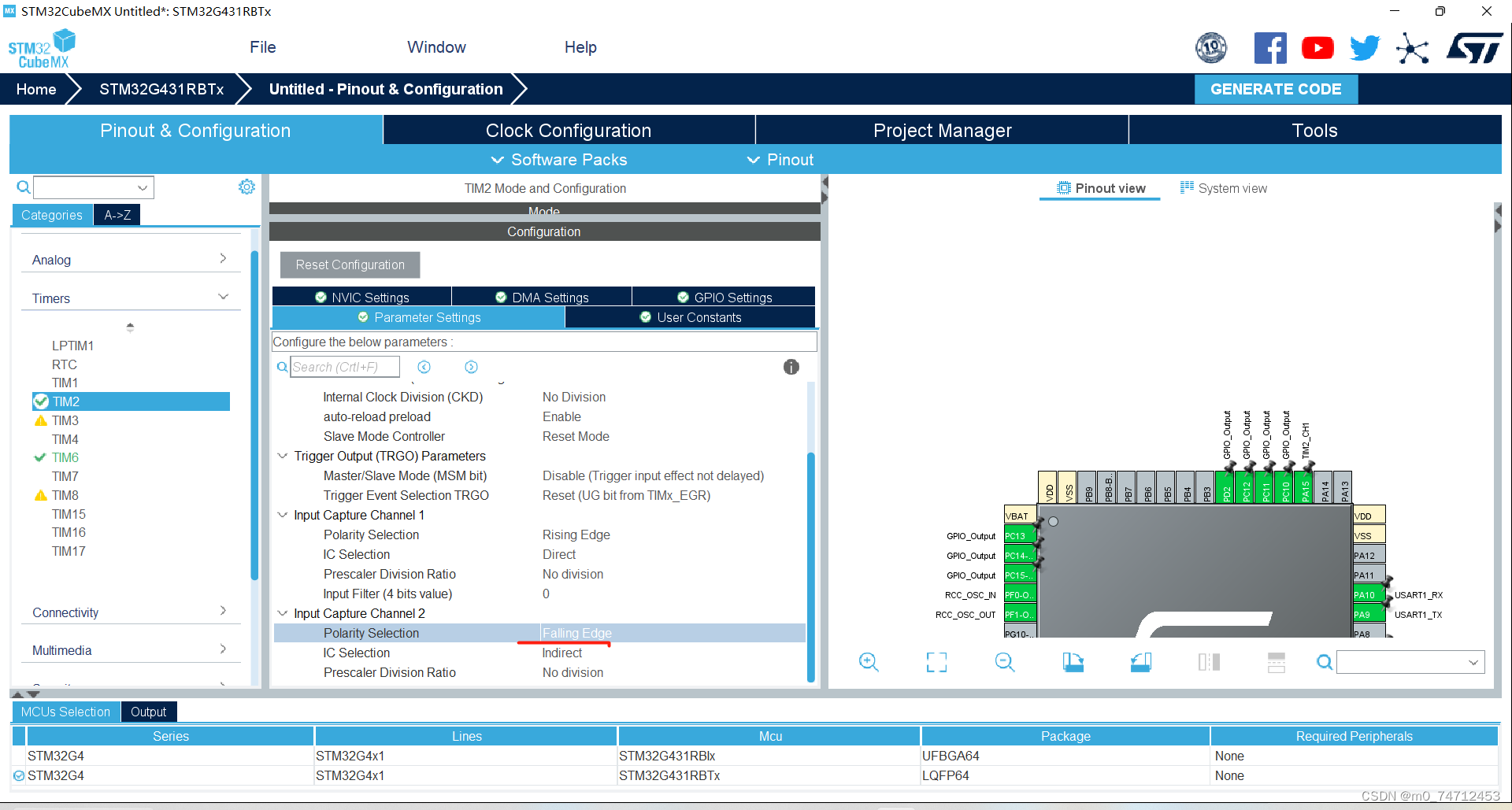
再配TIM2(输入捕获)
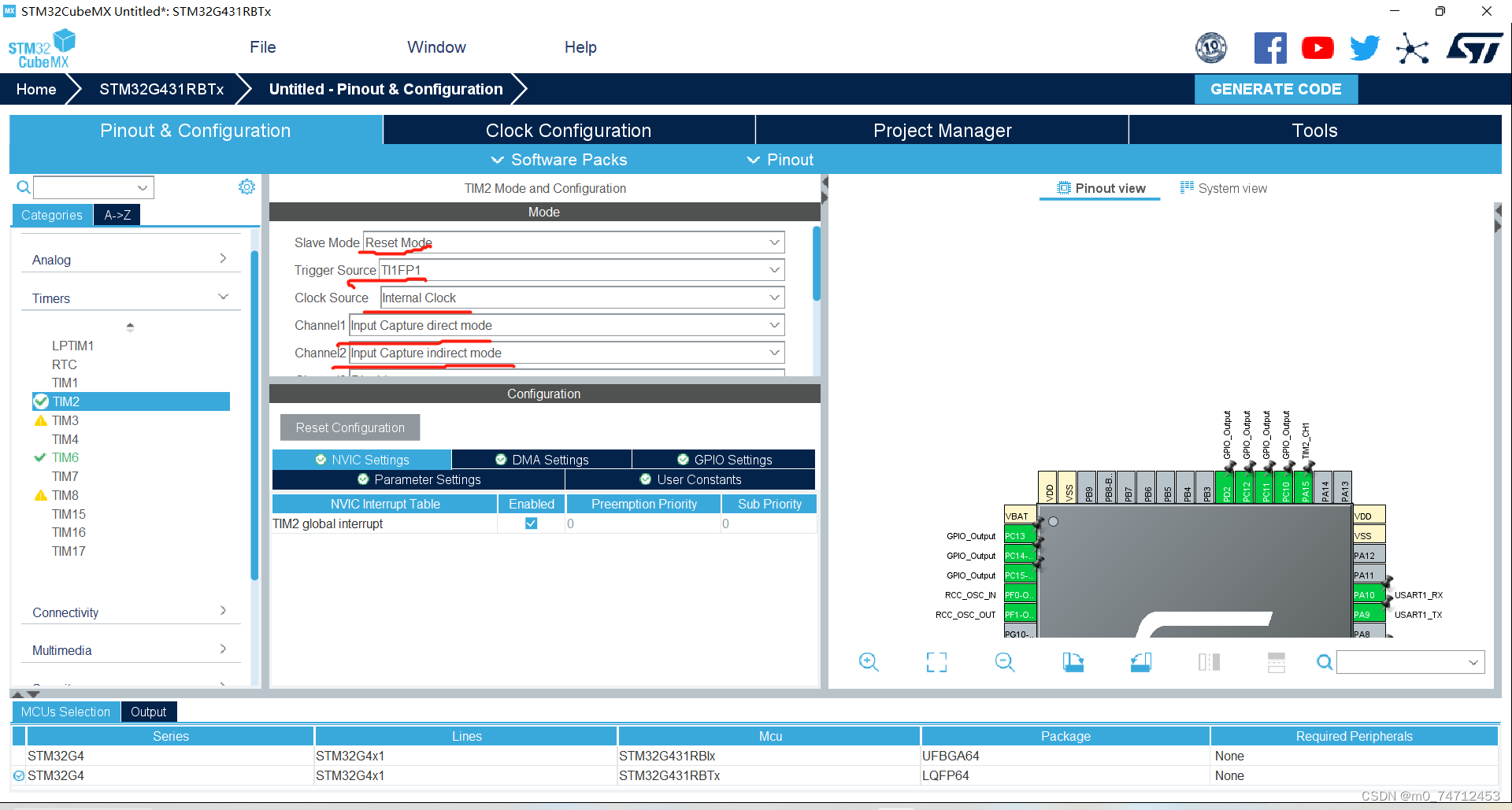
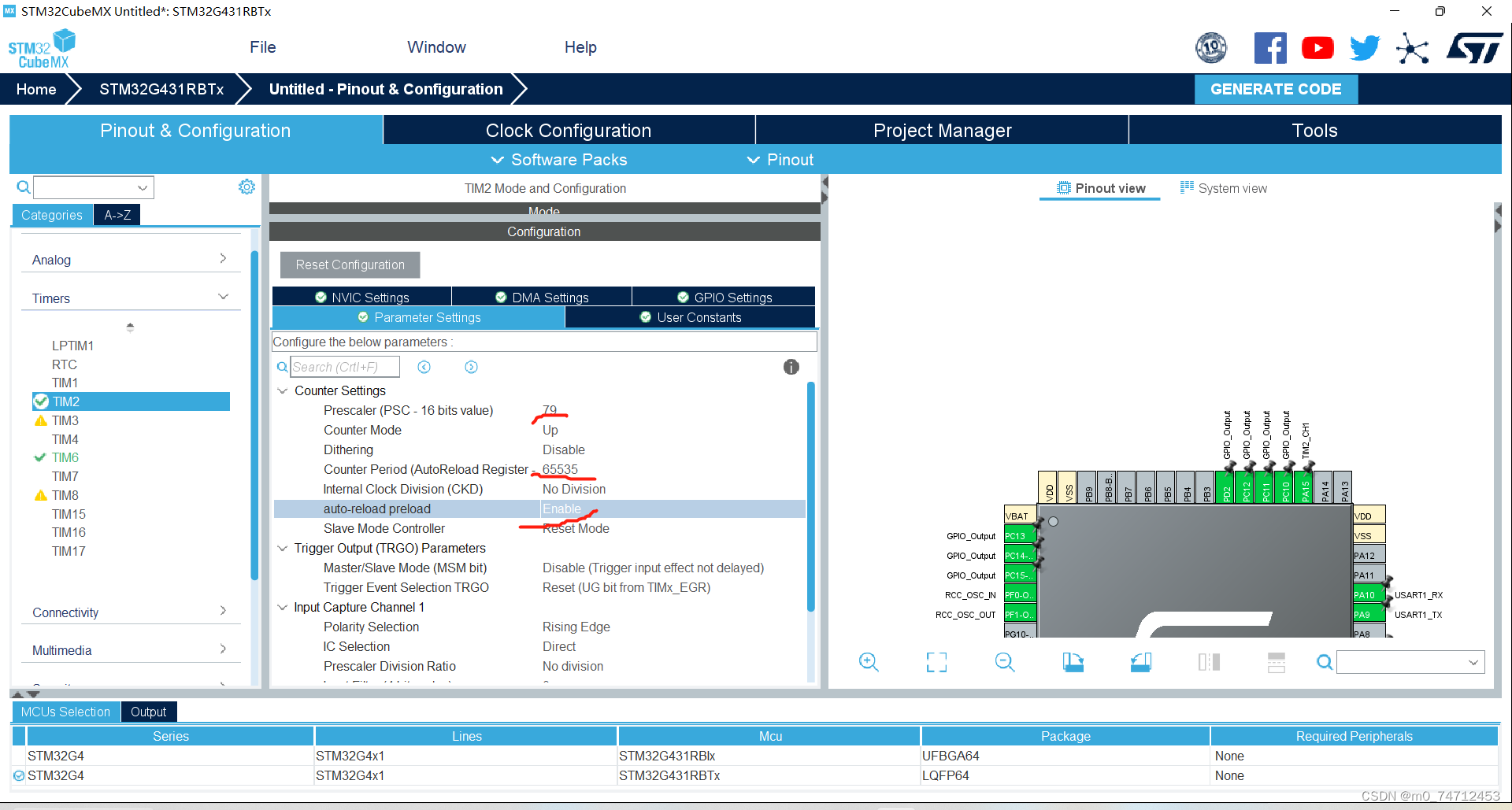
一个上升沿一个下降沿
再配TIM3跟TIM17(PWM输出)
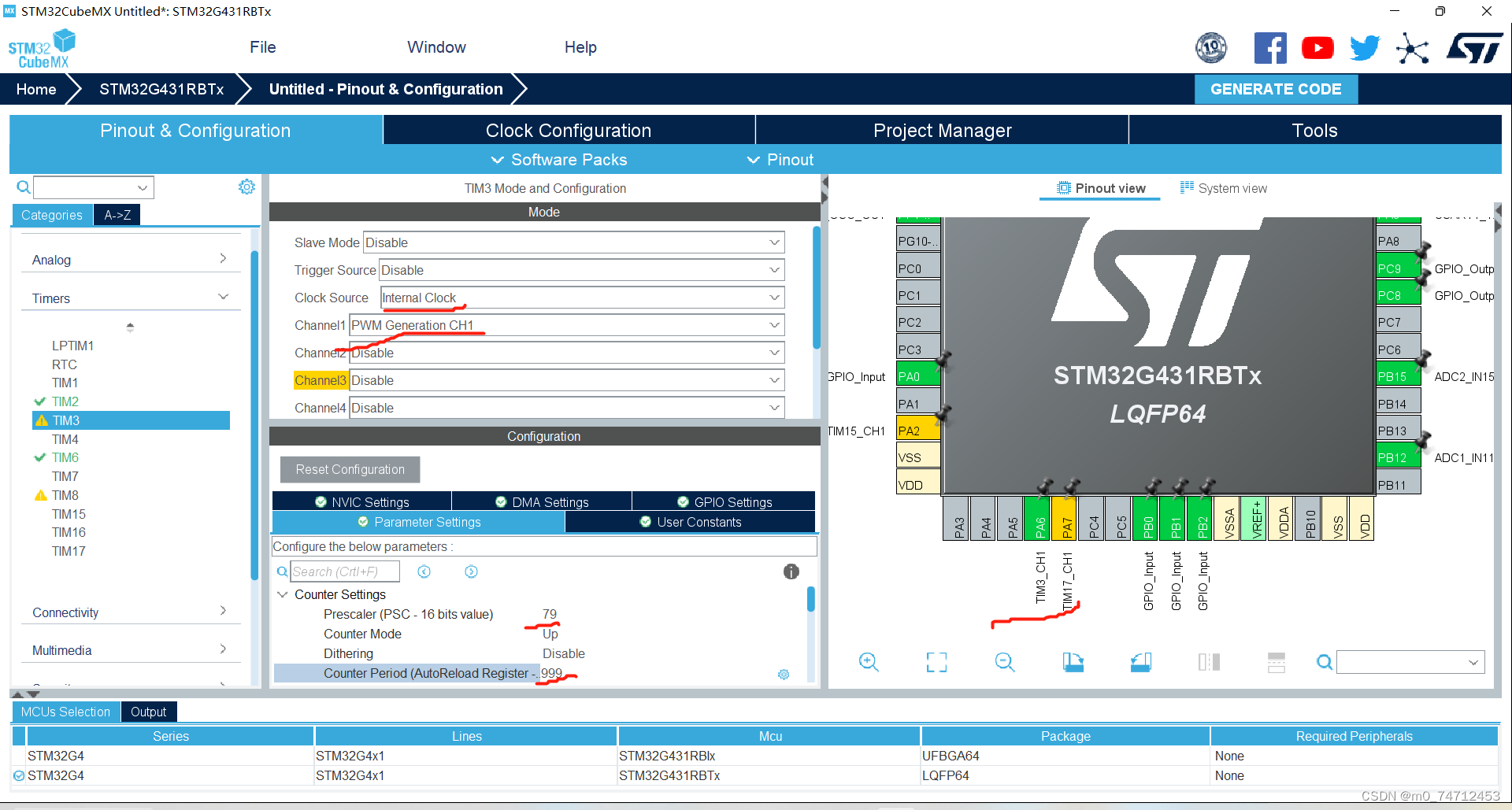
频率1KHz,占空比10%
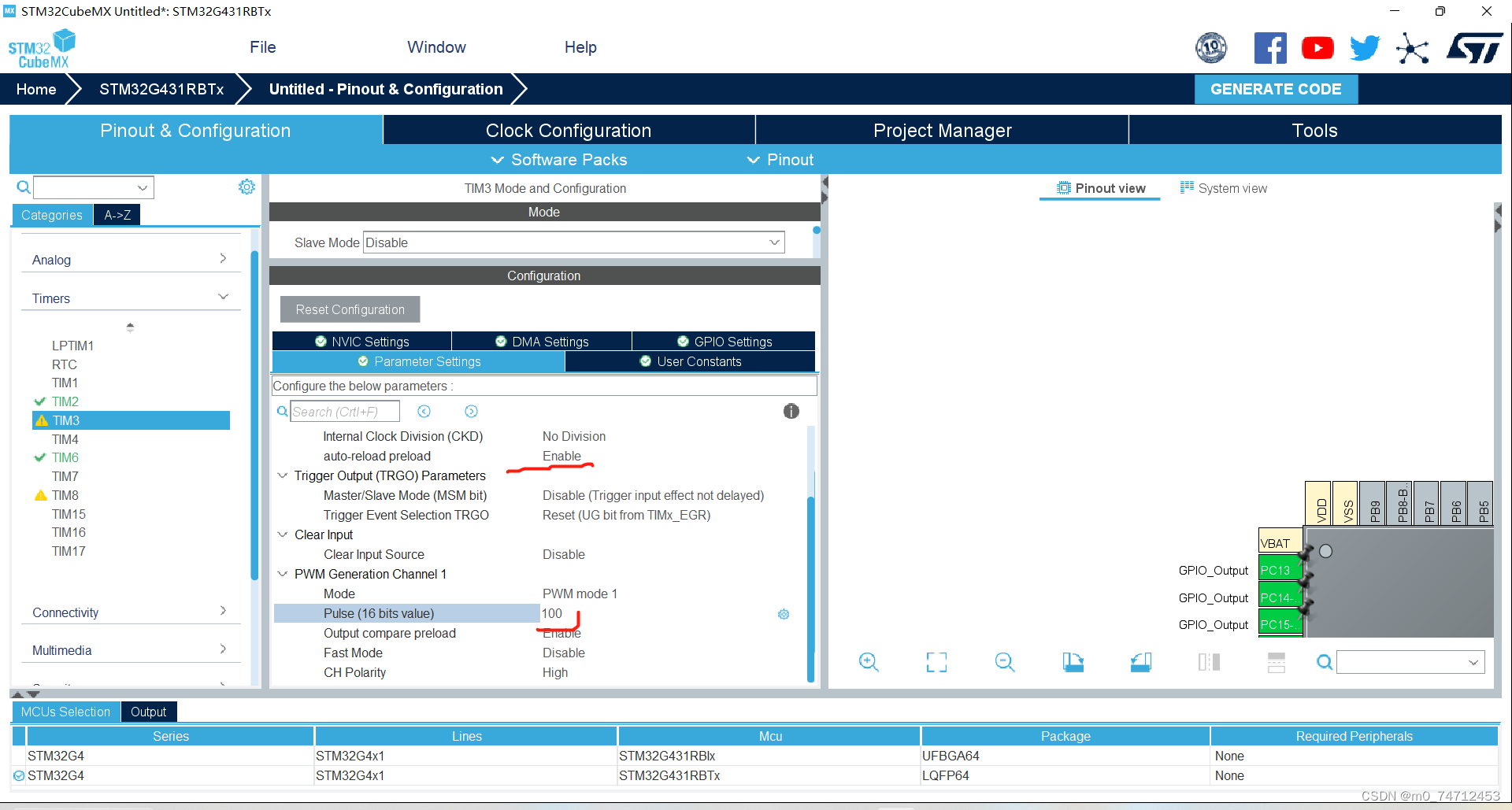
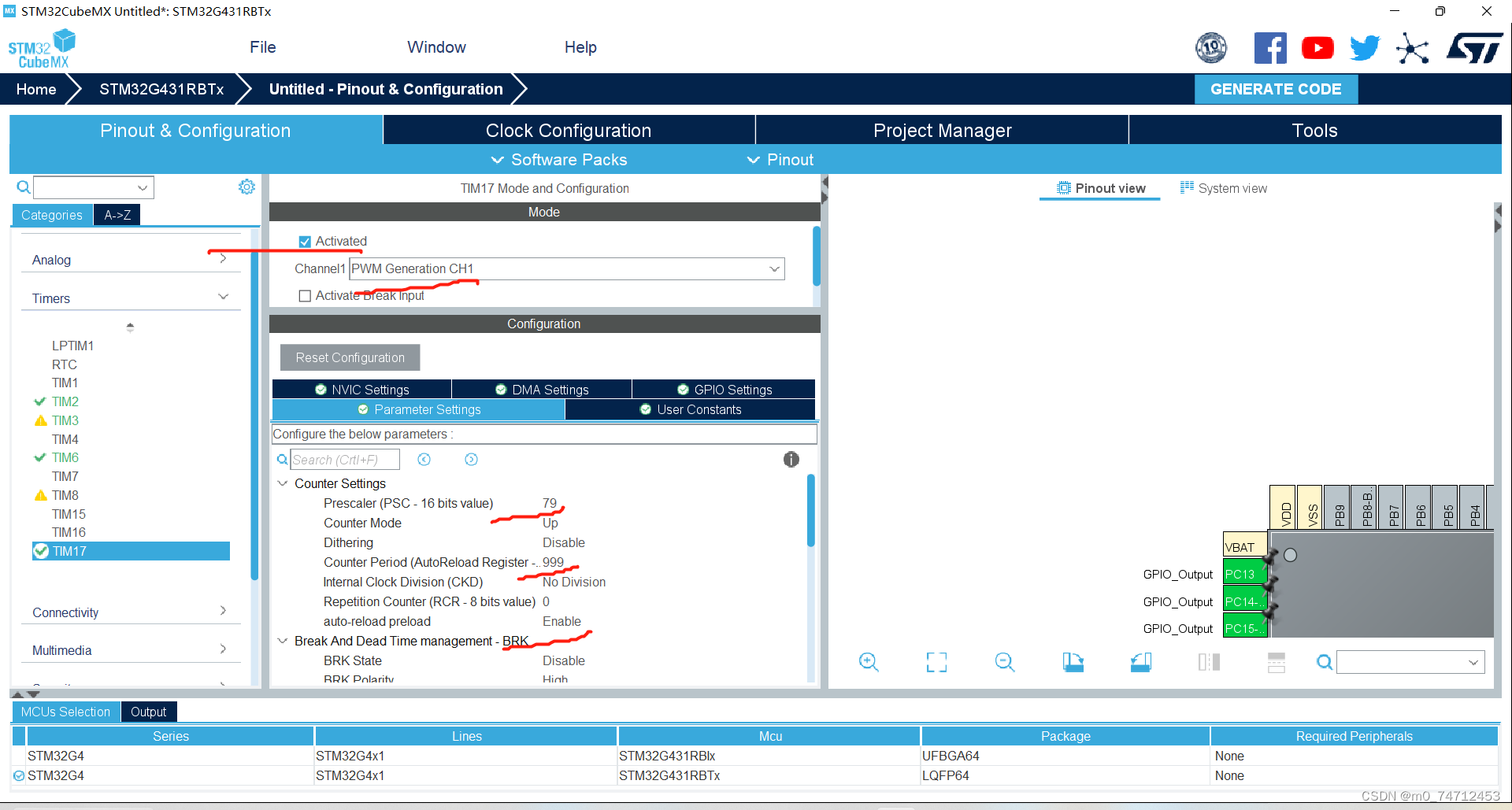
输出频率和占空比可自行修改
用__HAL TIM SET COMPARE (&htim2,TIM_CHANNEL_1,500)
和__HAI TIM SET AUTORELOAD(&htim2,999)
最后配置TIM15
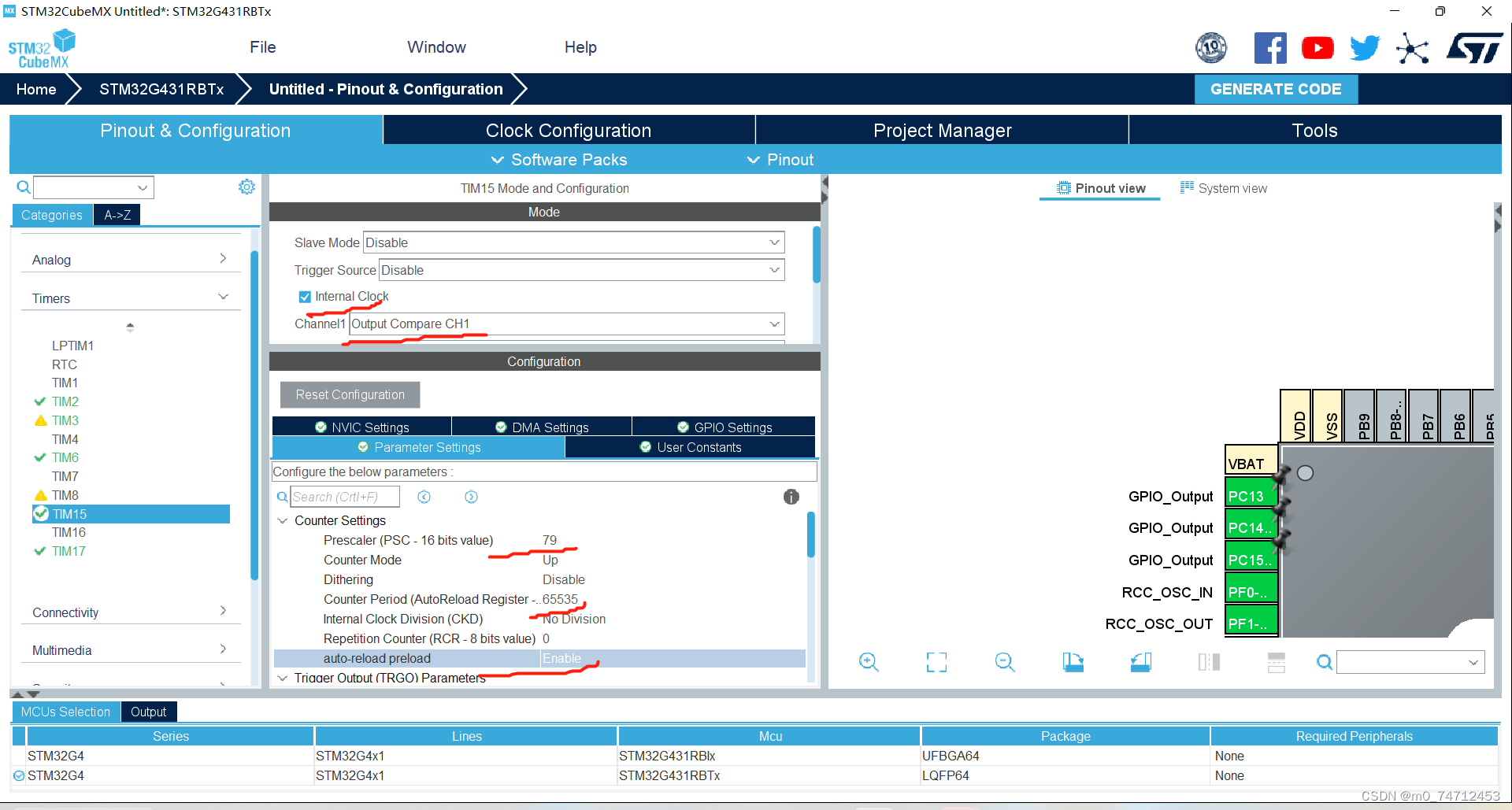
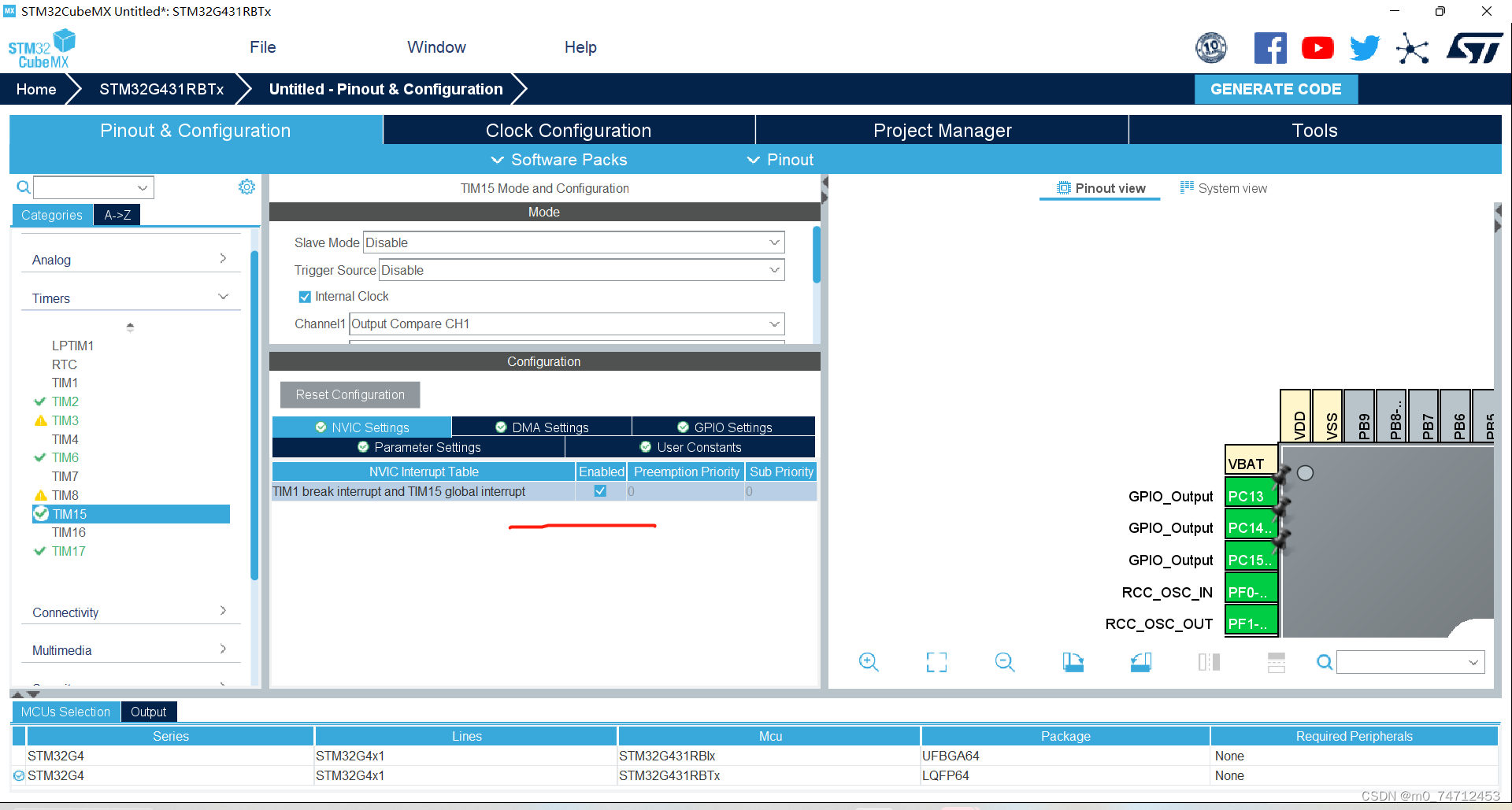
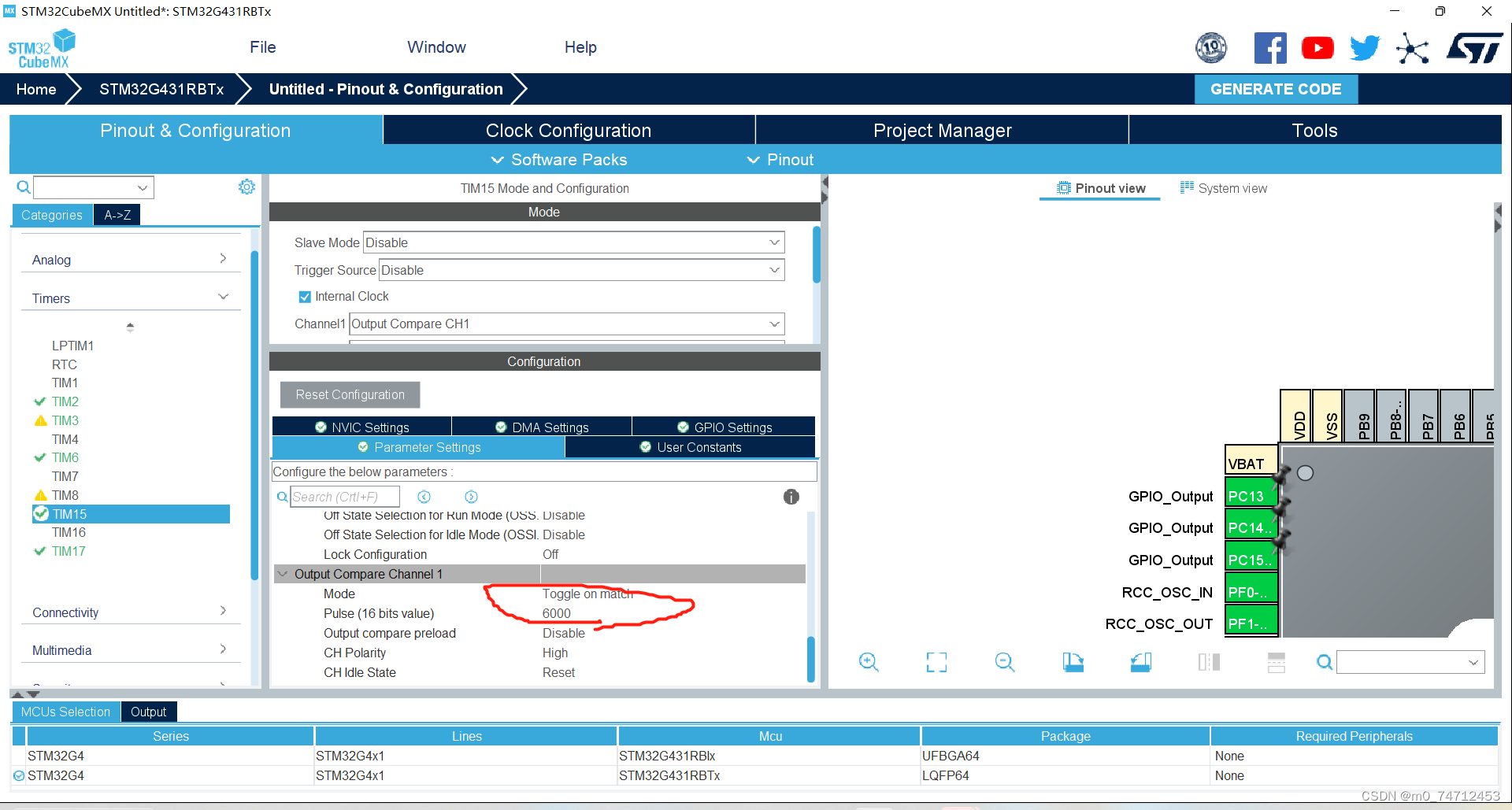
TIM全部搞定
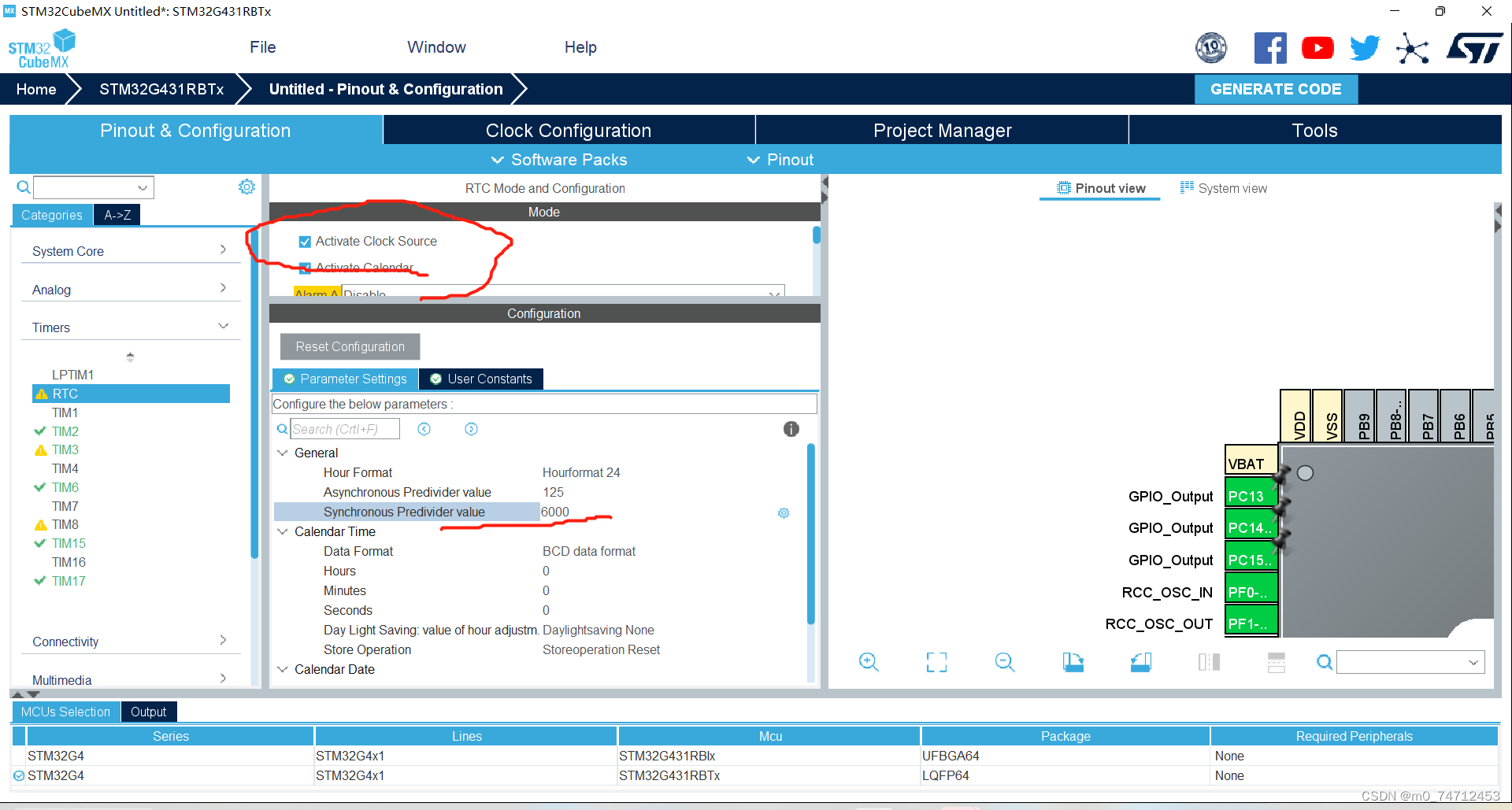
RTC:
1.LED部分(点亮或者熄灭8个LED灯)
void LED_Disp(uint8_t ucLed)
{
//**将所有的灯熄灭
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_8
|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
//根据ucLed的数值点亮相应的灯
HAL_GPIO_WritePin(GPIOC, ucLed<<8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
2.KEY部分(四个按键)
uint8_t Key_Scan(void)
{
uint8_t unKey_Val = 0;
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0) == GPIO_PIN_RESET)
unKey_Val = 1;
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1) == GPIO_PIN_RESET)
unKey_Val = 2;
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2) == GPIO_PIN_RESET)
unKey_Val = 3;
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
unKey_Val = 4;
return unKey_Val;
}3.LCD显示
LCD_Init();//初始化LCD
LCD_Clear(White);
LCD_SetBackColor(White);
LCD_SetTextColor(Blue);
sprintf((char *)Lcd_Disp_String, "xxx");//xxx为想显示的内容
LCD_DisplayStringLine(Line0, Lcd_Disp_String);4.USART串口使用
检测串口部分
void Usart_Proc(void)
{
if((uwTick - uwTick_Usart_Point)<1000) return;//减速函数
uwTick_Usart_Set_Point = uwTick;
sprintf(str, "%04d:Hello,world.\r\n", counter);
HAL_UART_Transmit(&huart1,(unsigned char *)str, strlen(str), 50);
if(++counter == 10000)
counter = 0;
}
5.ADC通道采集(R37跟R38)
uint16_t getADC1(void)
{
uint16_t adc = 0;
HAL_ADC_Start(&hadc1);
adc = HAL_ADC_GetValue(&hadc1);
return adc;
}
uint16_t getADC2(void)
{
uint16_t adc = 0;
HAL_ADC_Start(&hadc2);
adc = HAL_ADC_GetValue(&hadc2);
return adc;
}6.PWM输入捕获输出比较(占空比问题)
//基本定时器6更新回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM6)
{
// if(++counter == 10)
// {
// counter = 0;
// sprintf(str, "Hello,world.\r\n");
// HAL_UART_Transmit(&huart1,(unsigned char *)str, strlen(str), 50);
// }
}
}
//输入捕获PWM中断回调
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM2)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
PWM_T_Count = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1)+1;
PWM_Duty = (float)PWM_D_Count/PWM_T_Count;
}
else if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
PWM_D_Count = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_2)+1;
}
}
}
//方波输出回调函数
void HAL_TIM_OC_DelayElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM15)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
__HAL_TIM_SET_COMPARE(htim,TIM_CHANNEL_1,(__HAL_TIM_GetCounter(htim)+500));//1Khz
}
}
}7.E2PROM的读写(掉电保存数据)
void iic_24c02_write(uint8_t *pucBuf, uint8_t ucAddr, uint8_t ucNum)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(ucAddr);
I2CWaitAck();
while(ucNum--)
{
I2CSendByte(*pucBuf++);
I2CWaitAck();
}
I2CStop();
delay1(500);
}
void iic_24c02_read(uint8_t *pucBuf, uint8_t ucAddr, uint8_t ucNum)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(ucAddr);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
while(ucNum--)
{
*pucBuf++ = I2CReceiveByte();
if(ucNum)
I2CSendAck();
else
I2CSendNotAck();
}
I2CStop();
}8.RTC时钟
HAL_RTC_GetTime(&hrtc, &H_M_S_Time, RTC_FORMAT_BIN);//读取日期和时间必须同时使用
HAL_RTC_GetDate(&hrtc, &Y_M_D_Date, RTC_FORMAT_BIN);
sprintf((char *)Lcd_Disp_String, "Time:%02d-%02d-%02d",(unsigned int)H_M_S_Time.Hours, (unsigned int)H_M_S_Time.Minutes,(unsigned int)H_M_S_Time.Seconds);
LCD_DisplayStringLine(Line4, Lcd_Disp_String); 比赛官方资料:
【超级会员V5】通过百度网盘分享的文件:比赛当天资料
链接:https://pan.baidu.com/s/1QyKQomwl2xOOmWBF-ccnCw
提取码:ud3d
复制这段内容打开「百度网盘APP 即可获取」
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











