






前言
有需要帮忙代做Arduino,51和32小车或者其他单片机项目,课程设计,报告,PCB原理图的小伙伴,可以在文章最下方加我V交流咨询!!!
目录
一、analogWrite函数的使用
用analogWrite来替换digitalWrite
说明
将一个模拟数值写进Arduino引脚。这个操作可以用来控制LED的亮度, 或者控制电机的转速。
在Arduino UNO控制器中, analogWrite()函数支持以下引脚: 3, 5, 6, 9, 10, 11 在调用analogWrite()函数前,您无需使用pinMode()函数来设置该引脚。
语法
analogWrite(pin, value)
参数
pin :被读取的模拟引脚号码
value :0到255之间的PWM频率值, 0对应off, 255对应on
小车接线情况说明(具体看个人)
2,3控左电机,4,5控右电机
代码示例:
//小车前进的代码是:
void qianJin() {
// 小车前进的功能
digitalWrite(2, LOW);
digitalWrite(3, HIGH);
digitalWrite(4, HIGH);
digitalWrite(5, LOW);
}
//如果我们只对前进,左转,右转控制速度
//由于硬件特性:Arduino UNO的3,5口支持analogWrite函数,2,4口不支持
//所以,我希望前进的代码是
void qianJin() {
// 小车前进的功能
digitalWrite(2, LOW);
digitalWrite(3, HIGH);
digitalWrite(4, LOW);
digitalWrite(5, HIGH);
}
//此时,把接口4,5的杜邦线对调
//为了速度控制可以优化代码成
void qianJin() {
// 小车前进的功能
digitalWrite(2, LOW);
analogWrite(3, 120);
digitalWrite(4, HIGH);
analogWrite(5, 120);//120是
}控制前进速度的代码:
/*
把IO口4和IO口5的接线对调!
前进代码左轮3是模拟输出,5是模拟输出,2和4口不支持,直接给低电平
3口和5口支持模拟输出,达到小车前进方向上的速度控制目的。
*/
void carInit()
{
// put your setup code here, to run once:
pinMode(2, OUTPUT); // 配置2口为输出引脚
pinMode(3, OUTPUT); // 配置3口为输出引脚
//右轮信号方向初始化
pinMode(4, OUTPUT); // 配置4口为输出引脚
pinMode(5, OUTPUT); // 配置5口为输出引脚
}
void qianJin() {
// 小车前进的功能
digitalWrite(2, LOW);
analogWrite(3, 230);
digitalWrite(4, LOW);
analogWrite(5, 230);
}
void setup() {
// put your setup code here, to run once:
carInit();
}
void loop() {
// put your main code here, to run repeatedly:
qianJin();
}控制前进左转右转:
void carInit()
{
// put your setup code here, to run once:
pinMode(2, OUTPUT); // 配置2口为输出引脚
pinMode(3, OUTPUT); // 配置3口为输出引脚
//右轮信号方向初始化
pinMode(4, OUTPUT); // 配置4口为输出引脚
pinMode(5, OUTPUT); // 配置5口为输出引脚
}
void qianJin() {
// 小车前进的功能
digitalWrite(2, LOW);
analogWrite(3, 150);
digitalWrite(4, LOW);
analogWrite(5, 150);
}
void zuoZhuan() {
// 小车左转,左边电机速度慢,右边电机速度快
digitalWrite(2, LOW);
analogWrite(3, 90); //左
digitalWrite(4, LOW);
analogWrite(5, 250);//右
}
void youZhuan() {
// 小车左转,左边电机速度慢,右边电机速度快
digitalWrite(2, LOW);
analogWrite(3, 250); //左
digitalWrite(4, LOW);
analogWrite(5, 90);//右
}
void setup() {
// put your setup code here, to run once:
carInit();
}
void loop() {
// put your main code here, to run repeatedly:
youZhuan();
}二、红外循迹模块介绍
我这里用的是红外循迹模块TCRT5000

简单概括:没反射回来,D0输出高电平,灭灯
(1)什么情况下红外线没有返回来
红外照射在黑线上
在黑线上DO电平表现为高电平!
灯的表现为灭灯
(2)什么时候该左转
说明小车偏右,说明左循迹模块在黑线上,左循迹模块的电平表现为高电平
右循迹模块能接收到红外,电平表现为低电平
(3)什么实时该右转
说明小车偏左,右循迹在黑线上,右循迹高电平,左循迹低电平
三、循迹小车代码实现
/*
做循迹模块接Arduino的11口,右循迹模块接Arduinod的12口
小车控制速度前进
*/
int leftX = 11;
int rightX = 12;
void carInit()
{
// put your setup code here, to run once:
pinMode(2, OUTPUT); // 配置2口为输出引脚
pinMode(3, OUTPUT); // 配置3口为输出引脚
//右轮信号方向初始化
pinMode(4, OUTPUT); // 配置4口为输出引脚
pinMode(5, OUTPUT); // 配置5口为输出引脚
}
void qianJin() {
// 小车前进的功能
digitalWrite(2, LOW);
analogWrite(3, 100);
digitalWrite(4, LOW);
analogWrite(5, 100);
}
void ting() {
// 小车前进的功能
digitalWrite(2, LOW);
analogWrite(3, 0);
digitalWrite(4, LOW);
analogWrite(5, 0);
}
void zuoZhuan() {
// 小车左转,左边电机速度慢,右边电机速度快
digitalWrite(2, LOW);
analogWrite(3, 80); //左
digitalWrite(4, LOW);
analogWrite(5, 250);//右
}
void youZhuan() {
// 小车左转,左边电机速度慢,右边电机速度快
digitalWrite(2, LOW);
analogWrite(3, 250); //左
digitalWrite(4, LOW);
analogWrite(5, 80);//右
}
void setup() {
// put your setup code here, to run once:
carInit();
pinMode(leftX,INPUT);
pinMode(rightX,INPUT);
}
void loop() {
// put your main code here, to run repeatedly:
//什么时候该左转
//左循迹模块的电平表现为高电平,右循迹模块表现为低电平
if( digitalRead(leftX) == 1 && digitalRead(rightX) == 0 ){
zuoZhuan();
}
//什么时候右转
//右循迹高电平,左循迹低电平
if( digitalRead(leftX) == 0 && digitalRead(rightX) == 1 ){
youZhuan();
}
//什么时候前进
//左右都为低电平
if( digitalRead(leftX) == 0 && digitalRead(rightX) == 0 ){
qianJin();
}
//什么时候停
//左右都为高电平
if( digitalRead(leftX) == 1 && digitalRead(rightX) == 1 ){
ting();
}
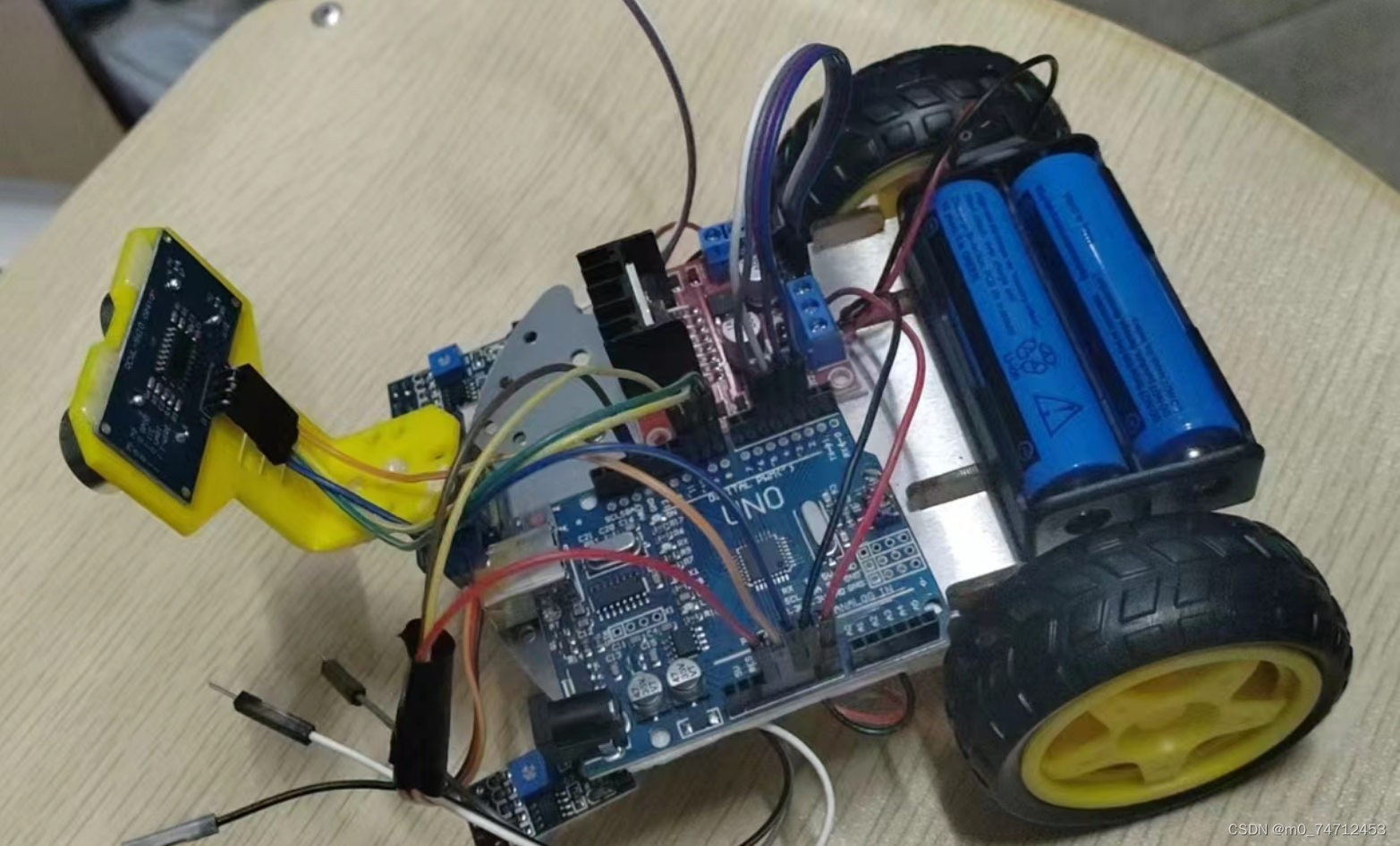
}四、实物示例

















 4619
4619











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











