






目录
一、PWM技术概述
二、亮度控制原理
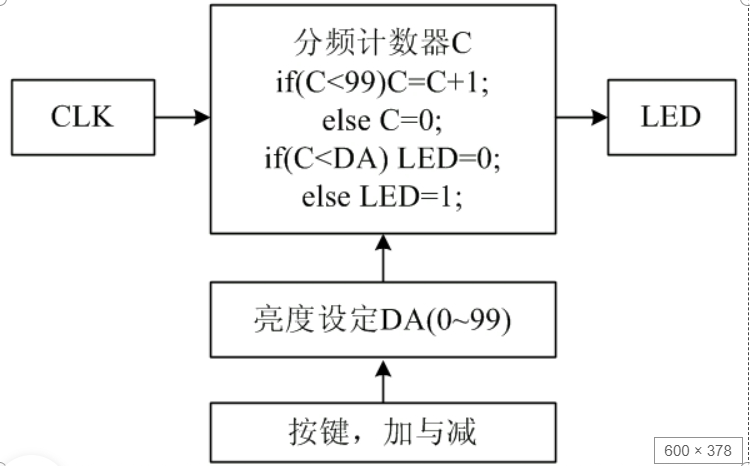
三、设计方案
四、编程实现方法
五、实验结果与展示
六、调试与优化建议
七、展示方法与效果
八、总结
一、PWM技术概述
脉冲宽度调制(PWM)是一种模拟电路数字控制技术。它通过改变占空比(即脉冲宽度与周期的比值)来控制模拟电路的输出。在照明控制中,PWM技术被广泛应用于LED等设备的亮度调节,通过改变LED的驱动电流来实现亮度的变化。
二、亮度控制原理
PWM调节原理是通过改变控制信号的脉冲宽度来调整输出信号的占空比。控制信号由一个固定频率的周期性方波和一个可变占空比的矩形脉冲组成。方波的高电平表示信号"1",低电平表示信号"0"。矩形脉冲的宽度表示高电平的持续时间,占空比则由高电平的持续时间占整个周期的比例来决定。LED的亮度与其通过的电流强度成正比。通过PWM技术,我们可以精确地控制LED的电流强度,从而实现对亮度的精确控制。具体而言,PWM信号的高电平期间,LED得到供电,亮度增加;低电平期间,LED断电,亮度降低。通过调整高电平占整个周期的比例,我们可以实现对LED亮度的调节和控制。
三、设计方案
四、编程实现方法
在Arduino中,我们可以使用analogWrite()函数来生成PWM信号。该函数接受两个参数:第一个是PWM信号的输出引脚,第二个是PWM信号的占空比(值域为0-255)。
以下是一个简单的示例程序,它使用PWM技术调节LED的亮度:
int ledPin = 9; // LED接在Arduino的第9号引脚
void setup() {
// 初始化PWM引脚为输出模式
pinMode(ledPin, OUTPUT);
}
void loop() {
for (int i = 0; i <= 255; i++) {
// 循环改变PWM信号的占空比,从0到255
analogWrite(ledPin, i);
delay(10); // 等待10毫秒,可以看到亮度逐渐变化
}
for (int i = 255; i >= 0; i--) {
// 反向循环改变PWM信号的占空比,从255到0
analogWrite(ledPin, i);
delay(10); // 等待10毫秒,可以看到亮度逐渐变化
}
}
五、展示方法与效果
实验结果的展示可以通过多种方式进行。一种简单的方法是通过视频或图片记录不同占空比下LED亮度的变化过程,直观地展示PWM控制的效果。另一种方法是制作一个交互式演示系统,通过按钮或触摸屏调整PWM信号的占空比,实时改变LED的亮度,从而展示PWM控制的实时性和灵活性。

六、调试与优化建议
在实际应用中,可能需要根据LED的具体型号和规格对PWM信号的参数进行微调,以达到最佳的亮度控制效果。此外,为了减小电磁干扰和电源噪声对LED亮度的影响,还可以在电路中加入滤波电容等元件进行优化。随着物联网、人工智能等技术的不断发展,PWM控制技术在照明领域的应用将更加广泛和深入。未来,我们可以期待更加智能、节能、环保的照明系统出现,为人们的生活和工作带来更多便利和舒适。
七、应用场景探讨
PWM控制灯亮度技术在许多领域都有广泛的应用,如智能家居、家庭照明智能调节、办公室照明需求多样、舞台灯光控制、商业展示灵活控制、公共场所节能照明、公共场所节能照明、LED显示屏驱动等。通过PWM技术,我们可以实现对照明设备的智能化控制,提高能源的利用率,同时创造出丰富多彩的视觉体验。
总结
本文通过介绍PWM技术概述、亮度控制原理、硬件平台、编程实现方法等方面,详细阐述了如何使用PWM技术控制LED的亮度。通过实验和调试,我们验证了PWM技术在照明控制中的可行性和有效性,并探讨了其在实际应用中的广泛前景。通过本次实验,我们不仅验证了PWM技术在LED亮度控制中的应用效果,还加深了对嵌入式系统和PWM原理的理解。这一技术在智能家居、照明工程等领域具有广泛的应用前景,值得进一步研究和探索。总之,PWM控制技术在照明领域具有广泛的应用前景和巨大的发展潜力。通过不断的技术创新和应用探索,我们可以更好地满足人们对美好生活的追求和向往。

















 969
969

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









