









一、原理
深度卷积对抗生成网络 (DCGAN)将GAN与CNN相结合,奠定后几乎所有GAN的基本网络架构。DCGAN极大地提升了原始GAN训练的稳定性以及生成结果质量。
DCGAN网络设计中采用了当时对CNN比较流行的改进方案:
1、将空间池化层用卷积层替代,这种替代只需要将卷积的步长stride设置为大于1的数值。改进的意义是下采样过程不再是固定的抛弃某些位置的像素值,而是可以让网络自己去学习下采样方式。
2、将全连接层去除
3、采用BN层,BN的全称是Batch Normalization,是一种用于常用于卷积层后面的归一化方法,起到帮助网络的收敛等作用。作者实验中发现对所有的层都使用BN会造成采样的震荡(我也不理解什么是采样的震荡,我猜是生成图像趋于同样的模式或者生成图像质量忽高忽低)和网络不稳定。
4、在生成器中除输出层使用Tanh(Sigmoid)激活函数,其余层全部使用ReLu激活函数。
5、在判别器所有层都使用LeakyReLU激活函数,防止梯度稀。
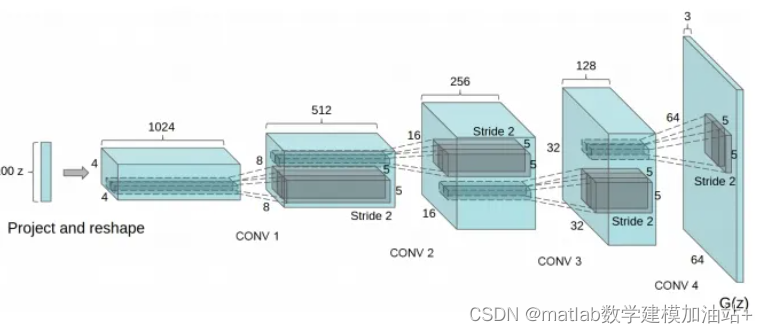
下面是DCGAN的生成器网络架构图。
二、代码实战
clear all; close all; clc;
%% Deep Convolutional Generative Adversarial Network
%% Load Data
load('mnistAll.mat')
trainX = preprocess(mnist.train_images);
trainY = mnist.train_labels;
testX = preprocess(mnist.test_images);
testY = mnist.test_labels;
%% Settings
settings.latentDim = 100;
settings.batch_size = 32; settings.image_size = [28,28,1];
settings.lrD = 0.0002; settings.lrG = 0.0002; settings.beta1 = 0.5;
settings.beta2 = 0.999; settings.maxepochs = 50;
%% Generator
paramsGen.FCW1 = dlarray(initializeGaussian([128*7*7,...
settings.latentDim]));
paramsGen.FCb1 = dlarray(zeros(128*7*7,1,'single'));
paramsGen.TCW1 = dlarray(initializeGaussian([3,3,128,128]));
paramsGen.TCb1 = dlarray(zeros(128,1,'single'));
paramsGen.BNo1 = dlarray(zeros(128,1,'single'));
paramsGen.BNs1 = dlarray(ones(128,1,'single'));
paramsGen.TCW2 = dlarray(initializeGaussian([3,3,64,128]));
paramsGen.TCb2 = dlarray(zeros(64,1,'single'));
paramsGen.BNo2 = dlarray(zeros(64,1,'single'));
paramsGen.BNs2 = dlarray(ones(64,1,'single'));
paramsGen.CNW1 = dlarray(initializeGaussian([3,3,64,1]));
paramsGen.CNb1 = dlarray(zeros(1,1,'single'));
stGen.BN1 = []; stGen.BN2 = [];
%% Discriminator
paramsDis.CNW1 = dlarray(initializeGaussian([3,3,1,32]));
paramsDis.CNb1 = dlarray(zeros(32,1,'single'));
paramsDis.CNW2 = dlarray(initializeGaussian([3,3,32,64]));
paramsDis.CNb2 = dlarray(zeros(64,1,'single'));
paramsDis.BNo1 = dlarray(zeros(64,1,'single'));
paramsDis.BNs1 = dlarray(ones(64,1,'single'));
paramsDis.CNW3 = dlarray(initializeGaussian([3,3,64,128]));
paramsDis.CNb3 = dlarray(zeros(128,1,'single'));
paramsDis.BNo2 = dlarray(zeros(128,1,'single'));
paramsDis.BNs2 = dlarray(ones(128,1,'single'));
paramsDis.CNW4 = dlarray(initializeGaussian([3,3,128,256]));
paramsDis.CNb4 = dlarray(zeros(256,1,'single'));
paramsDis.BNo3 = dlarray(zeros(256,1,'single'));
paramsDis.BNs3 = dlarray(ones(256,1,'single'));
paramsDis.FCW1 = dlarray(initializeGaussian([1,256*4*4]));
paramsDis.FCb1 = dlarray(zeros(1,1,'single'));
stDis.BN1 = []; stDis.BN2 = []; stDis.BN3 = [];
% average Gradient and average Gradient squared holders
avgG.Dis = []; avgGS.Dis = []; avgG.Gen = []; avgGS.Gen = [];
%% Train
numIterations = floor(size(trainX,4)/settings.batch_size);
out = false; epoch = 0; global_iter = 0;
%% modelGradients
function [GradGen,GradDis,stGen,stDis]=modelGradients(x,z,paramsGen,...
paramsDis,stGen,stDis)
[fake_images,stGen] = Generator(z,paramsGen,stGen);
d_output_real = Discriminator(x,paramsDis,stDis);
[d_output_fake,stDis] = Discriminator(fake_images,paramsDis,stDis);
% Loss due to true or not
d_loss = -mean(.9*log(d_output_real+eps)+log(1-d_output_fake+eps));
g_loss = -mean(log(d_output_fake+eps));
% For each network, calculate the gradients with respect to the loss.
GradGen = dlgradient(g_loss,paramsGen,'RetainData',true);
GradDis = dlgradient(d_loss,paramsDis);
end
%% progressplot
function progressplot(paramsGen,stGen,settings)
r = 5; c = 5;
noise = gpdl(randn([settings.latentDim,r*c]),'CB');
gen_imgs = Generator(noise,paramsGen,stGen);
gen_imgs = reshape(gen_imgs,28,28,[]);
fig = gcf;
if ~isempty(fig.Children)
delete(fig.Children)
end
I = imtile(gatext(gen_imgs));
I = rescale(I);
imagesc(I)
title("Generated Images")
colormap gray
drawnow;
end
%% dropout
function dly = dropout(dlx,p)
if nargin < 2
p = .3;实验结果
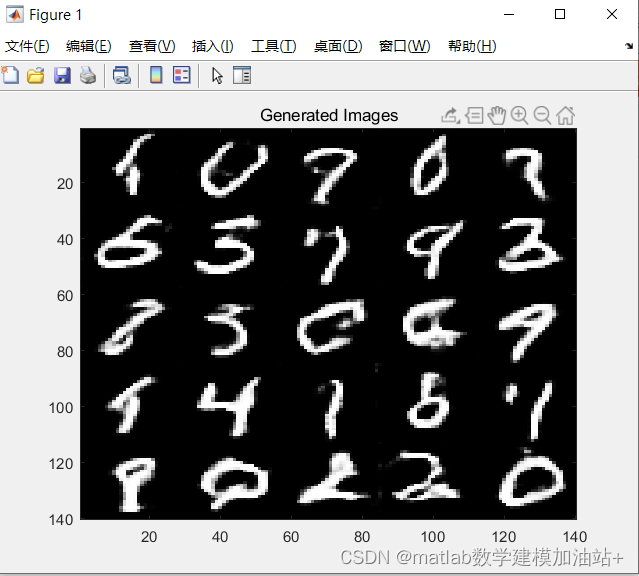
epoch = 5;
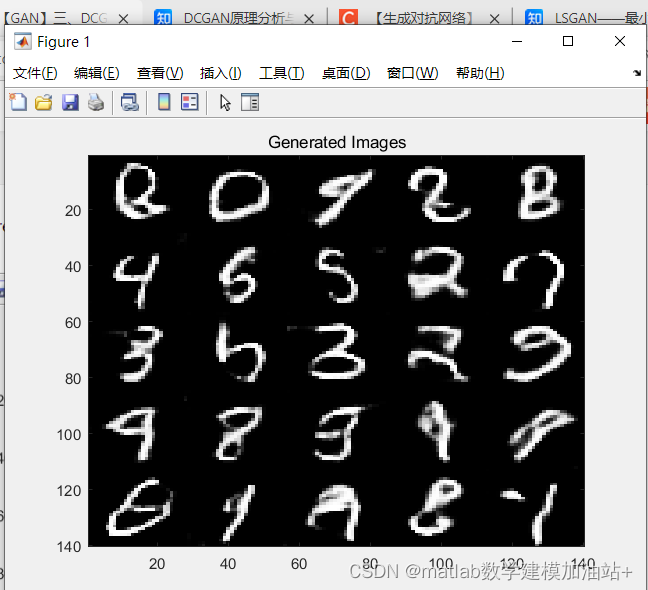
epoch = 6

















 534
534











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









