







一、STM32F407 内部传感器概述
STM32F407 微控制器集成了多个内部传感器,其中比较常用的是温度传感器和内部参考电压传感器。这些传感器可以为系统提供重要的环境信息,例如温度传感器可以用于监测芯片的工作温度,避免芯片因过热而损坏;内部参考电压传感器可以用于校准 ADC 测量结果,提高测量精度。
二、硬件连接
由于是内部传感器,不需要额外的硬件连接。但是要使用这些传感器,需要确保芯片的电源和时钟正常工作,并且 ADC(模拟 - 数字转换器)模块正常配置。
三、开发环境搭建
1. 安装 Keil MDK
Keil MDK 是一款广泛使用的 ARM 微控制器开发工具,你可以从官方网站下载并安装。
2. 安装 STM32CubeMX
STM32CubeMX 是 ST 公司提供的一款图形化配置工具,可以帮助你快速配置 STM32 微控制器的外设和时钟。你可以从 ST 官方网站下载并安装。
3. 创建项目
打开 STM32CubeMX,选择 STM32F407 芯片,配置系统时钟和 ADC 模块。在 “Pinout & Configuration” 选项卡中,选择 “ADC”,启用 ADC1 并配置相关参数。然后生成 Keil MDK 项目。
四、温度传感器驱动实现
1. 温度传感器原理
STM32F407 的温度传感器的输出电压与温度成线性关系,其公式为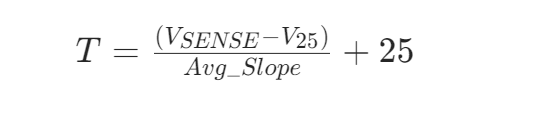
其中,T 是温度,VSENSE是温度传感器的输出电压,25 是在 25°C 时的输出电压,Avg_Slope 是温度传感器的平均斜率。
2. 代码实现
以下是使用 HAL 库实现温度传感器读取的代码示例:
#include "main.h"
#include "stm32f4xx_hal.h"
ADC_HandleTypeDef hadc1;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC1_Init(void);
// 读取温度传感器的值
float Read_Temperature(void)
{
uint32_t adc_value;
float voltage;
float temperature;
// 启动 ADC 转换
HAL_ADC_Start(&hadc1);
// 等待转换完成
if (HAL_ADC_PollForConversion(&hadc1, 100) == HAL_OK)
{
// 获取转换结果
adc_value = HAL_ADC_GetValue(&hadc1);
// 计算电压
voltage = (float)adc_value * 3.3 / 4096;
// 计算温度
temperature = ((voltage - 0.76) / 0.0025) + 25;
}
else
{
temperature = -1;
}
// 停止 ADC 转换
HAL_ADC_Stop(&hadc1);
return temperature;
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_ADC1_Init();
float temperature;
while (1)
{
temperature = Read_Temperature();
// 这里可以添加代码将温度值发送到串口或其他设备
HAL_Delay(1000);
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** 初始化 RCC 振荡器
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 7;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** 初始化 RCC 时钟
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
static void MX_ADC1_Init(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
/** 初始化 ADC
*/
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4;
hadc1.Init.Resolution = ADC_RESOLUTION_12B;
hadc1.Init.ScanConvMode = DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
hadc1.Init.DMAContinuousRequests = DISABLE;
hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
/** 配置 ADC 通道
*/
sConfig.Channel = ADC_CHANNEL_TEMPSENSOR;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_480CYCLES;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
}
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15, GPIO_PIN_RESET);
/*Configure GPIO pins : PD12 PD13 PD14 PD15 */
GPIO_InitStruct.Pin = GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
}
void Error_Handler(void)
{
while(1)
{
}
}
3. 代码解释
MX_ADC1_Init函数:初始化 ADC1 模块,配置时钟、分辨率、转换模式等参数,并将温度传感器通道配置为 ADC 通道。Read_Temperature函数:启动 ADC 转换,等待转换完成,获取转换结果,计算电压和温度,最后停止 ADC 转换。main函数:初始化系统时钟、GPIO 和 ADC 模块,然后在循环中不断读取温度传感器的值。
五、内部参考电压传感器驱动实现
1. 内部参考电压传感器原理
STM32F407 的内部参考电压传感器的输出电压是一个固定值,通常为 1.2V。通过读取 ADC 转换结果,可以计算出实际的参考电压值,从而校准 ADC 测量结果。
2. 代码实现
#include "main.h"
#include "stm32f4xx_hal.h"
ADC_HandleTypeDef hadc1;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC1_Init(void);
// 读取内部参考电压传感器的值
float Read_Vrefint(void)
{
uint32_t adc_value;
float vrefint;
// 启动 ADC 转换
HAL_ADC_Start(&hadc1);
// 等待转换完成
if (HAL_ADC_PollForConversion(&hadc1, 100) == HAL_OK)
{
// 获取转换结果
adc_value = HAL_ADC_GetValue(&hadc1);
// 计算内部参考电压
vrefint = (float)(1.2 * 4096) / adc_value;
}
else
{
vrefint = -1;
}
// 停止 ADC 转换
HAL_ADC_Stop(&hadc1);
return vrefint;
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_ADC1_Init();
float vrefint;
while (1)
{
vrefint = Read_Vrefint();
// 这里可以添加代码将内部参考电压值发送到串口或其他设备
HAL_Delay(1000);
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** 初始化 RCC 振荡器
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 7;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** 初始化 RCC 时钟
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
static void MX_ADC1_Init(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
/** 初始化 ADC
*/
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4;
hadc1.Init.Resolution = ADC_RESOLUTION_12B;
hadc1.Init.ScanConvMode = DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
hadc1.Init.DMAContinuousRequests = DISABLE;
hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
/** 配置 ADC 通道
*/
sConfig.Channel = ADC_CHANNEL_VREFINT;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_480CYCLES;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
}
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15, GPIO_PIN_RESET);
/*Configure GPIO pins : PD12 PD13 PD14 PD15 */
GPIO_InitStruct.Pin = GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
}
void Error_Handler(void)
{
while(1)
{
}
}
3. 代码解释
MX_ADC1_Init函数:初始化 ADC1 模块,配置时钟、分辨率、转换模式等参数,并将内部参考电压传感器通道配置为 ADC 通道。Read_Vrefint函数:启动 ADC 转换,等待转换完成,获取转换结果,计算内部参考电压值,最后停止 ADC 转换。main函数:初始化系统时钟、GPIO 和 ADC 模块,然后在循环中不断读取内部参考电压传感器的值。
六、调试与优化
1. 调试
- 使用调试工具(如 JTAG 或 SWD)连接开发板,单步执行代码,检查变量的值,确保 ADC 转换结果正确。
- 使用串口调试助手,将温度和内部参考电压值发送到计算机,实时监测传感器数据。
2. 优化
- 可以采用多次采样取平均值的方法,提高测量精度。
- 可以根据实际应用需求,调整 ADC 的采样时间和转换模式,提高系统性能。
七、总结
通过以上步骤,你可以实现 STM32F407 内部温度传感器和内部参考电压传感器的驱动。这些传感器可以为系统提供重要的环境信息,提高系统的稳定性和可靠性。在实际应用中,你可以根据具体需求对代码进行修改和优化。


















 2335
2335

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









