






C#基于海康视觉VM4.1的二次开发框架源码,有多流程框架 运动控制卡 服务框架 需要有海康VM的基础并且有海康威视VM开发狗
YID:68100668913688222
Bestco888

海康威视VM4.1二次开发框架:多流程与运动控制卡的深度集成
摘要
本文将探讨如何利用C#语言,基于海康威视VM4.1的二次开发框架进行多流程框架的构建,以及如何与运动控制卡进行集成。我们将通过具体的代码示例,详细介绍开发过程中的关键步骤和常见问题解决方案。
一、引子
在工业自动化和智能视觉领域,海康威视的视觉管理(VM)扮演着重要的角色。随着技术的进步,通过C#进行基于海康VM4.1的二次开发,已经成为许多开发者的首选。本文将从一个实际的项目角度出发,探讨如何利用C#进行多流程框架的构建,并如何与运动控制卡进行服务框架的集成。
二、海康VM4.1二次开发基础
在开始之前,我们需要对海康VM4.1的二次开发有一定的了解。这包括对海康VM的基础知识、C#的编程基础以及海康威视VM开发工具的熟悉。只有掌握了这些基础,我们才能更好地进行后续的开发工作。
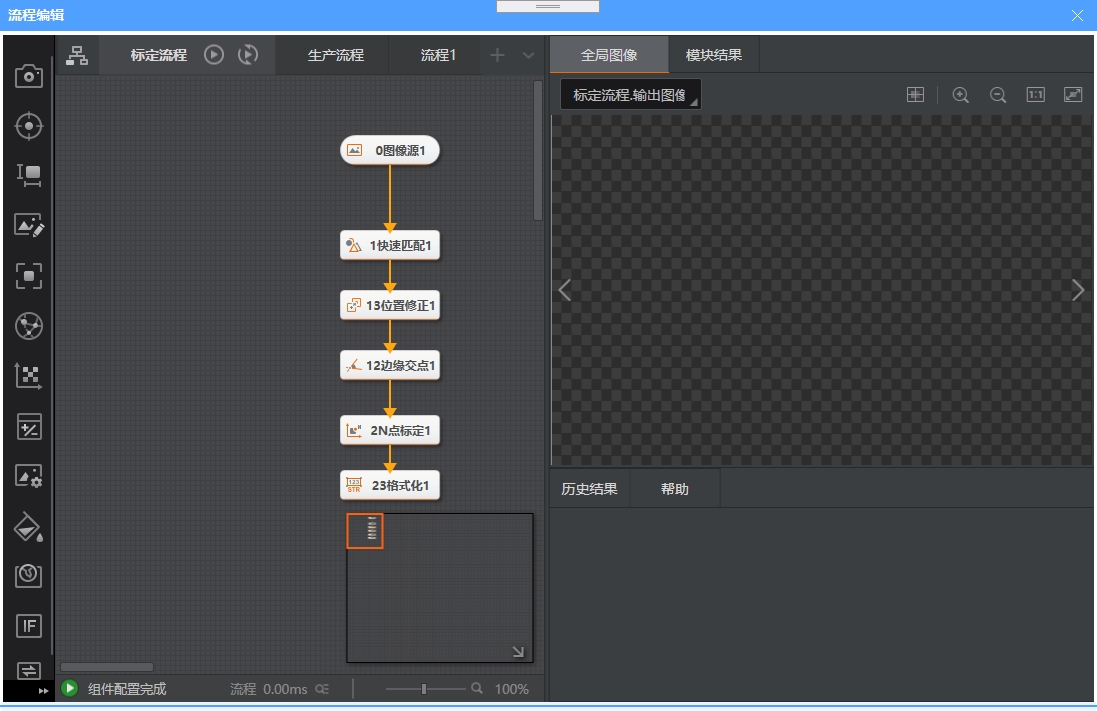
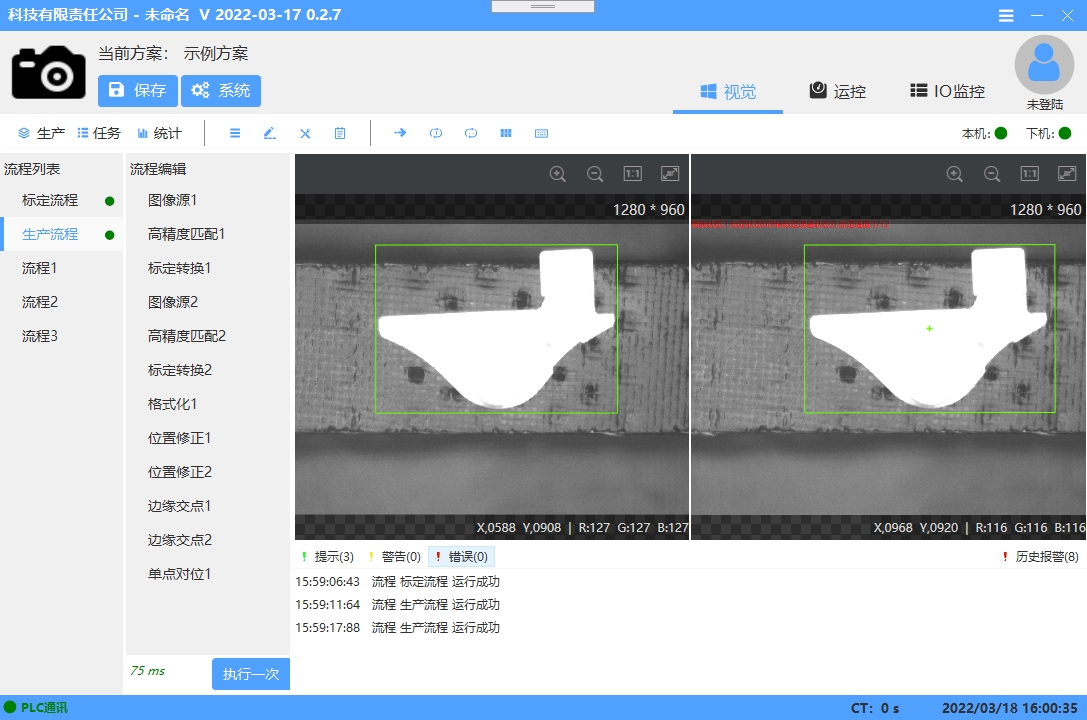
三、多流程框架的构建
在海康VM4.1的二次开发中,多流程框架的构建是核心之一。我们可以通过定义不同的流程,如图像处理流程、数据传输流程等,来满足不同场景下的需求。在C#中,我们可以使用任务并行库(TPL)或者异步编程模型来管理这些流程,确保它们能够高效、稳定地运行。
示例代码:
// 定义一个图像处理流程的示例代码片段
Task imageProcessingTask = Task.Run(() =>
{
// 图像处理的逻辑代码...
});
四、运动控制卡的集成
运动控制卡在工业自动化中扮演着重要的角色。通过与运动控制卡的集成,我们可以实现精确的运动控制。在C#中,我们可以通过相应的API或者SDK来实现与运动控制卡的通信。这需要我们编写相应的代码来发送和接收数据,以及对接收到的数据进行处理。
示例代码:
// 定义与运动控制卡通信的示例代码片段
using (var controlCard = new MotionControlCard())
{
// 设置运动参数...
controlCard.SetMotionParameters(...);
// 开始运动...
controlCard.StartMotion();
}
五、常见问题与解决方案
在开发过程中,我们可能会遇到各种各样的问题。例如,流程之间的数据传输问题、与运动控制卡的通信问题等。针对这些问题,我们需要仔细分析问题的原因,并寻找相应的解决方案。例如,我们可以通过优化数据传输的方式、检查通信接口的连接等来解决问题。
六、总结与展望
本文详细介绍了如何利用C#语言,基于海康威视VM4.1的二次开发框架进行多流程框架的构建和与运动控制卡的集成。通过具体的代码示例和常见问题的解决方案,我们希望能够为开发者提供一些有用的参考。随着技术的不断发展,我们相信海康威视的视觉管理将会在更多领域发挥更大的作用。未来,我们将继续关注这一领域的发展,并为大家带来更多的技术分享和经验总结。
深度分析奉上: C#基于海康视觉VM4.1的二次开发框架源码,有多流程框架 运动控制卡 服务框架 需要有海康VM的基础并且有海康威视VM开发狗
















 201
201

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









