






并联式混合动力系统simulink控制策略模型
①(工况可自行添加);
②仿真图像包括 发动机转矩变化图像、电机转矩变化图像、电池SOC变化图像、速度跟随图像、车速变化图像;
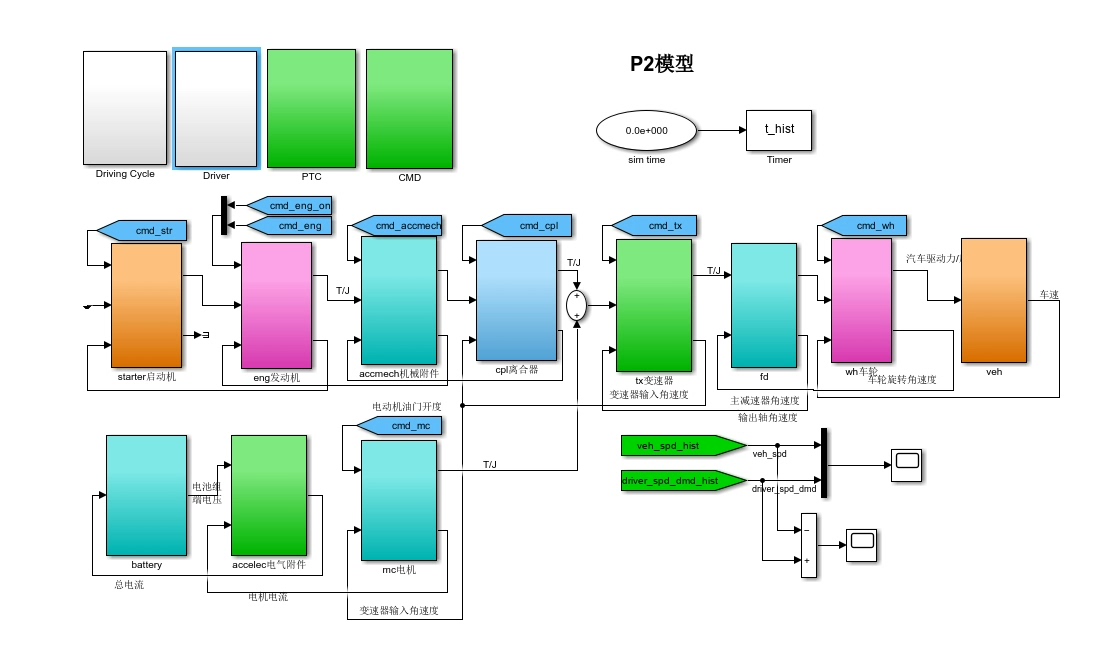
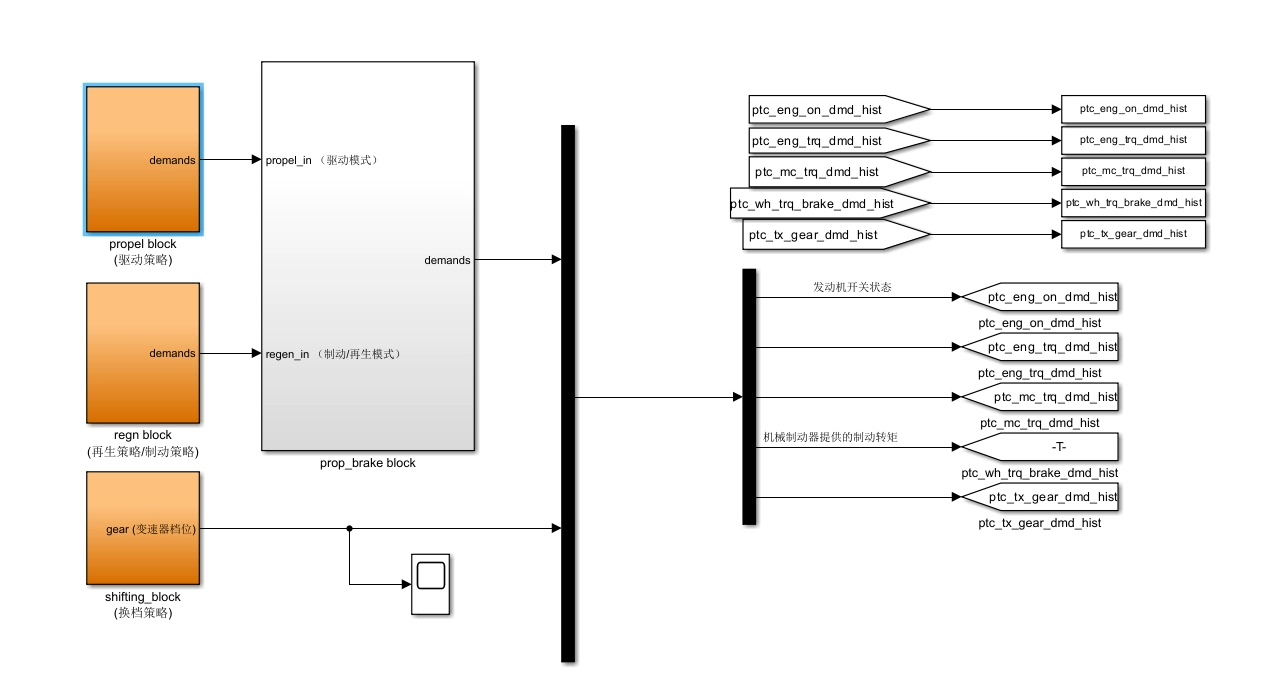
③整车similink模型中包含工况输入模型、驾驶员模型、发动机模型、电机模型、制动能量回收模型、转矩分配模型、运行模式切换模型、档位切换模型纵向动力学模型.
YID:1550703239840729
Jimmkudo
并联式混合动力系统是一种将内燃机和电动机相互补充的动力系统。在这个系统中,内燃机和电动机可以同时或分别为车辆提供动力,以实现能源的高效利用和减少排放。为了实现对并联式混合动力系统的有效控制,开发了一个基于Simulink的控制策略模型。
首先,我们可以根据实际需要,添加各种工况进行仿真。通过在Simulink模型中设置不同的工况参数,我们可以模拟各种实际驾驶情况,从而评估并联式混合动力系统在不同工况下的性能。这些工况可以包括不同的行驶速度、负载条件和环境温度等。
其次,在仿真过程中,我们可以观察到一些关键的数据变化,例如发动机转矩、电机转矩、电池SOC、速度跟随以及车速等。通过分析这些数据的变化趋势,我们可以评估并联式混合动力系统的整体性能,并对控制策略进行优化和改进。
在整车Simulink模型中,包含多个子模型,用于描述不同的组成部分和功能模块。其中包括工况输入模型、驾驶员模型、发动机模型、电机模型、制动能量回收模型、转矩分配模型、运行模式切换模型以及档位切换模型等。每个子模型都有自己的输入和输出,用于描述相应的物理关系和控制逻辑。
工况输入模型用于模拟外部环境对车辆的影响,例如路况、环境温度和气压等。驾驶员模型则根据实际的驾驶行为,生成相应的驾驶命令,用于控制并联式混合动力系统的工作状态。发动机模型和电机模型分别描述了内燃机和电动机的工作原理和性能特点,用于生成相应的转矩输出。
制动能量回收模型用于模拟制动过程中的能量回收,将制动过程中产生的动能转化为电能储存到电池中。转矩分配模型则根据当前的驾驶命令和车辆状态,决定内燃机和电动机的转矩分配比例,以实现最佳的动力输出效果。运行模式切换模型和档位切换模型则用于控制并联式混合动力系统的工作模式和档位选择,以适应不同工况下的需求。
最后,在整个Simulink模型中,还包含了纵向动力学模型,用于描述车辆的运动学和动力学特性。通过对车辆速度、加速度和制动力等参数的仿真计算,我们可以进一步评估并联式混合动力系统的性能,以及选择合适的控制策略进行优化。
综上所述,基于Simulink开发的并联式混合动力系统控制策略模型,具有清晰的结构和流畅的控制逻辑。通过对不同工况的仿真分析,我们可以评估并联式混合动力系统在不同条件下的性能表现,并对控制策略进行优化和改进。这一模型在实际应用中具有重要的指导意义,可为并联式混合动力系统的设计和优化提供有力支持。
以上相关代码,程序地址:http://coupd.cn/703239840729.html















 483
483











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









