






一般每个供应商都有不同的需求,不同的需求都会是在不同的场景下产生的。而不同的场景都会需要构建不同的地图数据。 所有一个动态编辑的地图的能力都软件,是非常有必要的。基于这个想法,我们提供了一个可以实时,动态编辑地图的界面,方便用户可以构建不同的地图场景。同时也方便自己开发过程中构建不同的场景测试,增强软件的稳定性,提高软件的扩展能力等等。
下图是软件的地图列表:
添加图片注释,不超过 140 字(可选)
通过选中某个地图或者创建某个地图数据:
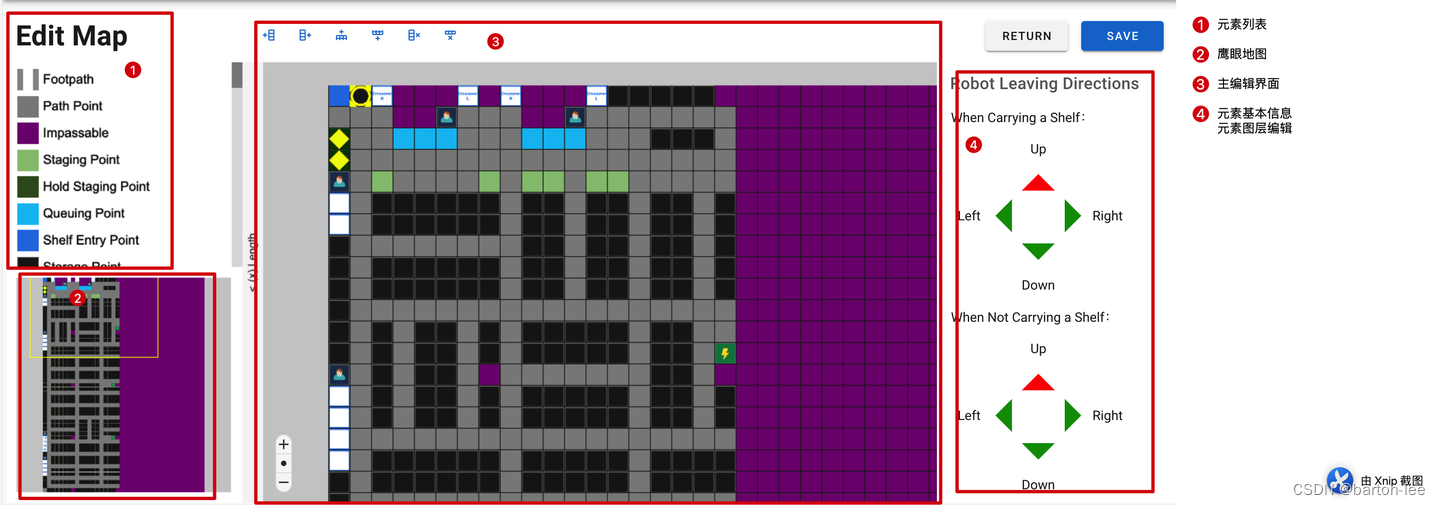
添加图片注释,不超过 140 字(可选)
第一块区域: 元素列表区域,用户可以拖动该区域的元素到主界面中,构建每个元素点属性
第二块区域:地图鹰眼,主要提供一个小鹰眼地图给用户查看自己当前的整体编辑状态
第三块区域:地图的主要编辑区域,表示地图的每个点内容属性内容
第四块区域:选中主区域中的某点,编辑该的一些图层信息和基本属性等内容
保存后,用户可以更具自己的需求,编辑的定制化地图,并应用到生产环境中。
如过大家有兴趣的可以留言交流。















 280
280











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









