







设计仓库机器人的控制管理系统涉及到路径规划、任务分配、库存管理、通信系统等方面。以下是一个基本的仓库机器人控制管理系统方案的概述:
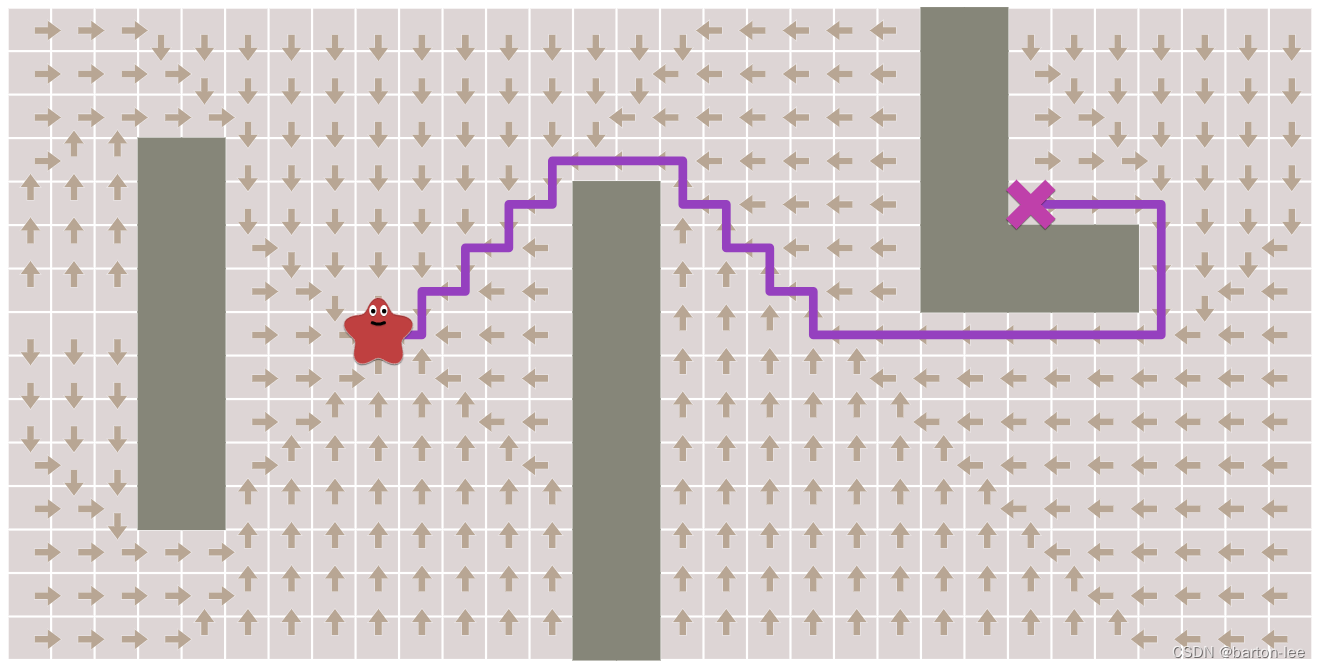
- 路径规划:设计一个路径规划系统,用于确定机器人在仓库内的最佳行驶路径,以最大程度地提高效率并避免碰撞。常见的路径规划算法包括A*算法、Dijkstra算法、RRT(Rapidly-exploring Random Tree)等。
- 任务分配:实现一个任务分配系统,将不同的任务分配给仓库机器人以最大程度地利用资源和时间。这可能涉及到优化算法,如贪婪算法、遗传算法等。
- 库存管理:设计一个库存管理系统,跟踪仓库中各种物品的位置、数量和状态,以便及时找到并处理订单。这可能需要与仓库管理系统(WMS)集成,以实现对库存的全面管理。
- 通信系统:建立一个可靠的通信系统,使仓库机器人能够与中央控制系统或其他机器人进行实时通信。这有助于协调机器人之间的行动,并及时更新任务和状态信息。
- 安全性考虑:在设计控制管理系统时,要考虑安全性因素,确保机器人在执行任务时不会造成危险或损坏。这可能涉及到避障算法、紧急停止机制等。
- 系统集成:将路径规划、任务分配、库存管理和通信系统集成到一个统一的控制管理系统中,确保各个模块之间的协调工作。
路径规划中常用的激励算法包括以下几种:
- A*算法:A*算法是一种常用的启发式搜索算法,结合了Dijkstra算法的最短路径搜索和贪婪最优化搜索的特点。它通过启发式函数(估价函数)来评估每个节点的优先级,以便在搜索过程中优先扩展最有可能导向目标的节点。 资料链接:
- D*算法:D*算法是一种增量式路径规划算法,通常用于动态环境中的路径 replanning。它通过反向搜索和启发式函数来动态更新路径,以适应环境的变化。资料参考:
【机器人】 D*算法-动态路径规划 - 知乎 (zhihu.com) https://zhuanlan.zhihu.com/p/390866901
https://zhuanlan.zhihu.com/p/390866901
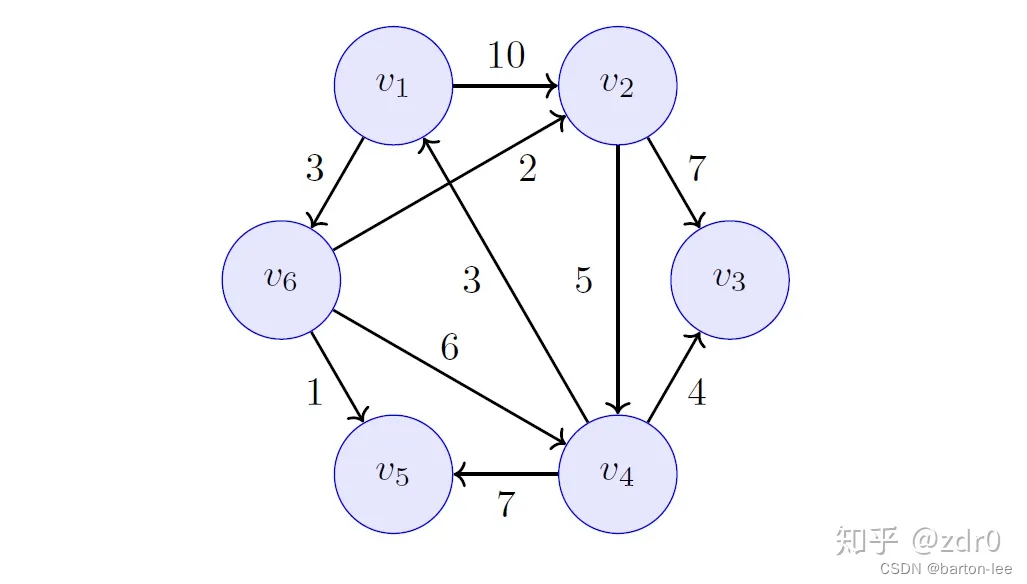
- Dijkstra算法:Dijkstra算法是一种经典的最短路径算法,适用于没有负权边的图。它通过不断更新起点到各个节点的最短距离来找到最短路径。

















 1483
1483

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









