







灵巧手系统控制
目录
1A4988驱动芯片
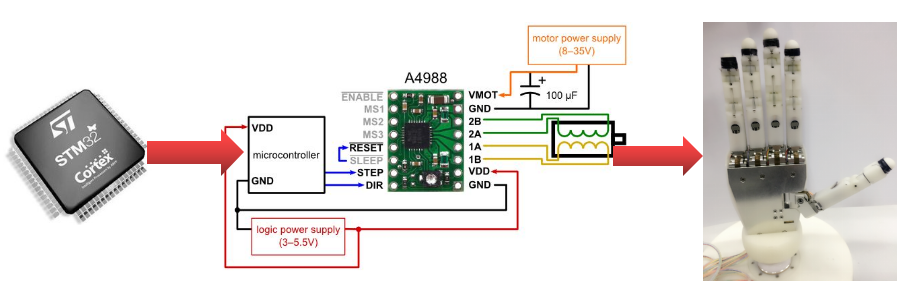
- 灵巧手由6路两相四线步进电机控制,其中四指各一个自由度,拇指两个自由度
- 选用A4988作为步进电机的驱动芯片,控制电机的方向和速度
- MSx设置电机步进模式,DIR控制电机的正反转方向,STEP控制脉冲的频率用来控制电机速度
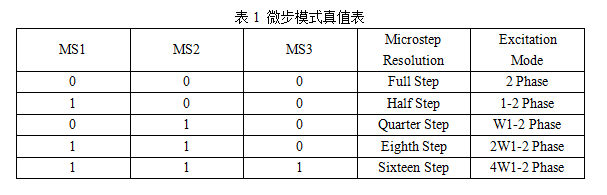
MS1、MS2、MS3接高低电平时,电机的步进模式如下表所示,分别是全步进、1/2步进、1/4步进、1/8步进、1/16步进模型。步进电机走一步是1.8度,一圈就是200步。例如使用1/16步进,则需要3200步才走完一圈,在实验中我们选择1/4步进模式,每800步电机转动一圈。
DIR用于控制电机的转动方向,DIR为高电平时电机正转,低电平时电机反转,STEP用于控制脉冲频率,用于控制电机的转速。1A、1B分别接电机同相的两端,2A、2B接另一相的两端。
2STM32F407源码
A4988.c
#include "sys.h"
#include "delay.h"
#include "A4988.h"
void MS_Step(void)
{
RCC->AHB1ENR|=1<<1; //ʹÄÜPORTBʱÖÓ
GPIO_Set(GPIOB,PIN6|PIN7|PIN8,GPIO_MODE_OUT,GPIO_OTYPE_PP,GPIO_SPEED_100M,GPIO_PUPD_PU); //PB6£¬PB7£¬PB8ÉèÖÃ
GPIO_Set(GPIOB,PIN8|PIN10|PIN11,GPIO_MODE_OUT,GPIO_OTYPE_PP,GPIO_SPEED_100M,GPIO_PUPD_PU); //PB9£¬PB10£¬PB11ÉèÖÃ
//µç»ú1-µç»ú5²½½øģʽΪ: È«²½
MS1_Motor12345=1;
MS2_Motor12345=1;
MS3_Motor12345=1;
//µç»ú6²½½øģʽΪ: 1/4
MS1_Motor6=1;
MS2_Motor6=1;
MS3_Motor6=1;
}
//Description: A4988²½½øµç»ú¿ØÖƶ˿ڳõʼ»¯£¬¿ØÖƲ½½øµç»úµÄÕý·´×ª¡¢ËÙ¶ÈÓëÐýת½Ç¶È
void STEP_Init(void)
{
RCC->AHB1ENR|=1<<4; //ʹÄÜPORTEʱÖÓ
GPIO_Set(GPIOE,PIN0|PIN1,GPIO_MODE_OUT,GPIO_OTYPE_PP,GPIO_SPEED_100M,GPIO_PUPD_PU); //ÉèÖÃPE0¡¢PE1
GPIO_Set(GPIOE,PIN2|PIN3,GPIO_MODE_OUT,GPIO_OTYPE_PP,GPIO_SPEED_100M,GPIO_PUPD_PU); //ÉèÖÃPE2¡¢PE3
GPIO_Set(GPIOE,PIN4|PIN5,GPIO_MODE_OUT,GPIO_OTYPE_PP,GPIO_SPEED_100M,GPIO_PUPD_PU); //ÉèÖÃPE4¡¢PE5
GPIO_Set(GPIOE,PIN6|PIN7,GPIO_MODE_OUT,GPIO_OTYPE_PP,GPIO_SPEED_100M,GPIO_PUPD_PU); //ÉèÖÃPE6¡¢PE7
GPIO_Set(GPIOE,PIN8|PIN9,GPIO_MODE_OUT,GPIO_OTYPE_PP,GPIO_SPEED_100M,GPIO_PUPD_PU); //ÉèÖÃPE8¡¢PE9
GPIO_Set(GPIOE,PIN10|PIN11,GPIO_MODE_OUT,GPIO_OTYPE_PP,GPIO_SPEED_100M,GPIO_PUPD_PU); //ÉèÖÃPE10¡¢PE11
}
//¿ØÖƵç»úµÄÕý·´×ªºÍËÙ¶È
//dir:Ϊ·½Ïò¿ØÖÆ£¬TRUE:Õýת FALSE£º·´×ª
//periodΪÖÜÆÚ
//steps:Âö³å¸öÊý
void Step_Control_Motor1(u8 dir,u16 period,u32 steps) //ÖÜÆÚÔ½´ó£¬×ªËÙԽС
{
u32 i;
for(i=0; i <= steps;i++)
{
DIR1 = dir;
STEP1 = 1;
delay_us(1);
STEP1 = 0;
delay_us(period);
}
}
void Step_Control_Motor2(u8 dir,u16 period,u32 steps) //ÖÜÆÚÔ½´ó£¬×ªËÙԽС
{
u32 i;
for(i=0; i <= steps;i++)
{
DIR2 = dir;
STEP2 = 1;
delay_us(1);
STEP2 = 0;
delay_us(period);
}
}
void Step_Control_Motor3(u8 dir,u16 period,u32 steps) //ÖÜÆÚÔ½´ó£¬×ªËÙԽС
{
u32 i;
for(i=0; i <= steps;i++)
{
DIR3 = dir;
STEP3 = 1;
delay_us(1);
STEP3 = 0;
delay_us(period);
}
}
void Step_Control_Motor4(u8 dir,u16 period,u32 steps) //ÖÜÆÚÔ½´ó£¬×ªËÙԽС
{
u32 i;
for(i=0; i <= steps;i++)
{
DIR4 = dir;
STEP4 = 1;
delay_us(1);
STEP4 = 0;
delay_us(period);
}
}
void Step_Control_Motor5(u8 dir,u16 period,u32 steps) //ÖÜÆÚÔ½´ó£¬×ªËÙԽС
{
u32 i;
for(i=0; i <= steps;i++)
{
DIR5 = dir;
STEP5 = 1;
delay_us(1);
STEP5 = 0;
delay_us(period);
}
}
void Step_Control_Motor6(u8 dir,u16 period,u32 steps) //ÖÜÆÚÔ½´ó£¬×ªËÙԽС
{
u32 i;
for(i=0; i <= steps;i++)
{
DIR6 = dir;
STEP6 = 1;
delay_us(1);
STEP6 = 0;
delay_us(period);
}
}A4988.h
#ifndef __A4988_H
#define __A4988_H
#include "sys.h"
#define TRUE 1
#define FALSE 0
//6¸öA4988Çý¶¯Æ÷DIR¡¢STEP¶Ë¿Ú¶¨Òå
//DIRx£ºTUREÕýת¡¢FALSE·´×ª
#define DIR1 PEout(0)
#define STEP1 PEout(1)
#define DIR2 PEout(2)
#define STEP2 PEout(3)
#define DIR3 PEout(4)
#define STEP3 PEout(5)
#define DIR4 PEout(6)
#define STEP4 PEout(7)
#define DIR5 PEout(8)
#define STEP5 PEout(9)
#define DIR6 PEout(10)
#define STEP6 PEout(11)
//µç»ú1-µç»ú5 ²½½øģʽÊÇͳһÉèÖõģ¬µç»ú6µÄ²½½øģʽµ¥¶ÀÉèÖÃ
#define MS1_Motor12345 PBout(6)
#define MS2_Motor12345 PBout(7)
#define MS3_Motor12345 PBout(8)
#define MS1_Motor6 PBout(9)
#define MS2_Motor6 PBout(10)
#define MS3_Motor6 PBout(11)
void MS_Step(void); //ÉèÖõç»ú²½½øģʽ
void STEP_Init(void); //Çý¶¯Æ÷¶Ë¿Ú³õʼ»¯
//¿ØÖƵç»ú1-µç»ú6µÄÕý·´×ªºÍËÙ¶È
// dir: Ϊ·½Ïò¿ØÖÆ£¬TRUE:Õýת FALSE£º·´×ª
// period£º ΪÖÜÆÚ£¬ÖÜÆÚÔ½´óËÙ¶ÈԽС£¬ÖÜÆÚԽСËÙ¶ÈÔ½´ó
// steps: ΪÂö³å¸öÊý
void Step_Control_Motor1(u8 dir,u16 period,u32 steps);
void Step_Control_Motor2(u8 dir,u16 period,u32 steps);
void Step_Control_Motor3(u8 dir,u16 period,u32 steps);
void Step_Control_Motor4(u8 dir,u16 period,u32 steps);
void Step_Control_Motor5(u8 dir,u16 period,u32 steps);
void Step_Control_Motor6(u8 dir,u16 period,u32 steps);
#endif
主函数test.c
#include "sys.h"
#include "delay.h"
#include "led.h"
#include "key.h"
#include "timer.h"
#include "A4988.h"
int main(void)
{
u16 t,T1,T2; //T1¡¢T2 Ϊµç»úÖÜÆÚ£¬TÔ½´ó£¬×ªËÙԽС
u8 key; //´æ´¢É¨ÃèµÄ°´¼üÖµ
//u8 flag=1;
Stm32_Clock_Init(336,8,2,7);
delay_init(168);
LED_Init();
KEY_Init();
MS_Step();
STEP_Init();
while(1)
{
Step_Control_Motor2(TRUE,400,200);
// LED0=0;
// LED1=0;
// LED2=0;
// LED3=0;
// delay_ms(300);
LED0=1;
LED1=1;
LED2=1;
LED3=1;
// delay_ms(300);
}
}
//int main(void)
//{
// u16 t,T1,T2; //T1¡¢T2 Ϊµç»úÖÜÆÚ£¬TÔ½´ó£¬×ªËÙԽС
// u8 key; //´æ´¢É¨ÃèµÄ°´¼üÖµ
// //u8 flag=1;
//
// Stm32_Clock_Init(336,8,2,7);
// delay_init(168);
//
// LED_Init();
// KEY_Init();
//
//
// MS_Step();
// STEP_Init();
//
// while(1)
// {
// key=KEY_Scan(0);
//
//
// Èç¹ûKEY0±»°´Ï£¬µç»ú1-µç»ú5Õýת¼ÓËÙ£¬µç»ú6·´×ª¼õËÙ
// if(key==KEY0_PRES)
// {
// LED0=1;
// delay_ms(10);
// for(t=10;t>1;t--)
// {
// T1=1000*t;
// T2=11000-1000*t;
//
// Step_Control_Motor1(TRUE,T1,200);
// Step_Control_Motor2(TRUE,T1,200);
// Step_Control_Motor3(TRUE,T1,200);
// Step_Control_Motor4(TRUE,T1,200);
// Step_Control_Motor5(TRUE,T1,200);
//
// Step_Control_Motor6(FALSE,T2,200);
//
// }
// }
//
//
// Èç¹ûKEY1±»°´Ï£¬µç»ú1-µç»ú6ÔÈËÙ½»ÌæÕýת¡¢·´×ª
// else if(key==KEY1_PRES)
// {
// LED1=1;
// delay_ms(10);
// while(1)
// {
// delay_ms(500);
// Step_Control_Motor1(TRUE,5000,200);
// Step_Control_Motor2(TRUE,5000,200);
// Step_Control_Motor3(TRUE,5000,200);
// Step_Control_Motor4(TRUE,5000,200);
// Step_Control_Motor5(TRUE,5000,200);
// Step_Control_Motor6(TRUE,5000,200);
//
// delay_ms(500);
// Step_Control_Motor1(FALSE,6000,100);
// Step_Control_Motor2(FALSE,6000,100);
// Step_Control_Motor3(FALSE,6000,100);
// Step_Control_Motor4(FALSE,6000,100);
// Step_Control_Motor5(FALSE,6000,100);
// Step_Control_Motor6(FALSE,6000,100);
//
// }
// }
//
// Èç¹ûKEY2±»°´Ï£¬×÷²âÊÔ£¬µç»ú1ÏȼÓËÙÔÙ¼õËÙ
// else if(key==KEY2_PRES)
// {
// LED2=1;
// delay_ms(10);
// while(1)
// {
// for(t=10;t>1;t--)
// {
// T1=1000*t;
// Step_Control_Motor1(FALSE,T1,200);
// }
//
// delay_ms(300);
//
// for(t=1;t<10;t++)
//
// {
// T1=1000*t;
// Step_Control_Motor1(FALSE,T1,200);
// }
//
// delay_ms(300);
//
// }
// }
//
// Èç¹ûKEY3±»°´Ï£¬6¸öµç»úͬʱÔÈËÙÕýת
// else if(key==KEY3_PRES)
// {
// LED3=1;
// delay_ms(10);
// while(1)
// {
// Step_Control_Motor1(TRUE,5000,200);
// Step_Control_Motor2(TRUE,5000,200);
// Step_Control_Motor3(TRUE,5000,200);
// Step_Control_Motor4(TRUE,5000,200);
// Step_Control_Motor5(TRUE,5000,200);
// Step_Control_Motor6(TRUE,5000,200);
// }
// }
//
// ûÓа´¼ü°´ÏÂʱ£¬ËĸöµÆ½»ÌæÉÁ˸£¬µç»ú1ÔÈËÙÕýת
// else
// {
// LED0=0;
// LED1=0;
// LED2=0;
// LED3=0;
// delay_ms(300);
//
// LED0=1;
// LED1=1;
// LED2=1;
// LED3=1;
// delay_ms(300);
//
// Step_Control_Motor1(TRUE,5000,200);
//
// }
// }
//
//}















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









