




电机的分类:
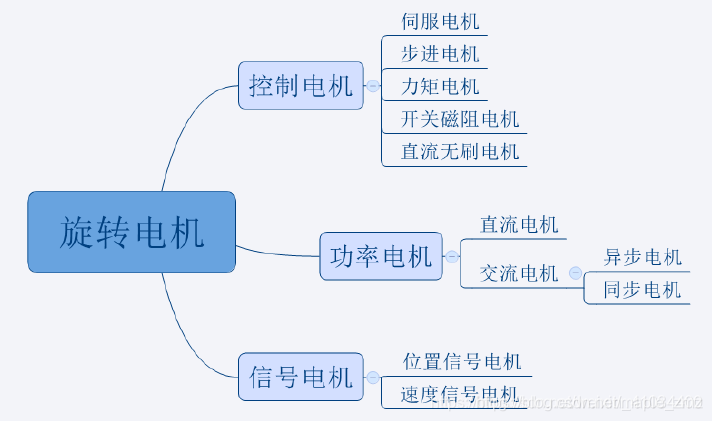
控制电机:
一、伺服电机(servo motor)(闭环)(控制电机1)

原理:电压信号转换为电机轴上的机械输入量。
有直流和交流之分:交流永磁同步伺服电机,直流无刷电机。
伺服电机广泛应用于各种控制系统中,能将输入的电压信号转换为电机轴上的机械输出量。一般的,伺服电机要求电机的转速要收所加电压信号的控制,转速能够随着所加电压信号的变化而连续变化,转矩能通过控制器输出的电流进行控制。
其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降.
伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。
直流伺服电机分为有刷和无刷电机。有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。
绝大部分的伺服电机是指交流永磁同步伺服电机或者直流无刷电机。伺服电机都是闭环控制系统,应用在各种运动控制尤其随动系统。
二、直流无刷电机(BLDC)(控制电机2)
BLDC的定子(stator)是通电的线圈,而转子(rotor)却是永磁体!
只要给定子上的线圈接入方向适当的电流,即让电磁铁的磁极方向和永磁体的磁极方向正好对应,就能排斥、或者吸引转子做旋转运动了。
下图就是按顺序单独给线圈通电,使其朝向转子的方向为电磁铁的S极,吸引转子顺时针方向旋转
以上的驱动方式,即按顺序单独给每个线圈通电,虽然可行,但是未免太过繁琐,效率低下。因此,实际上的BLDC会将那六个线圈两两组合,分成A,B,C三个绕组,这样我们就可以同时驱动两个电磁铁了,效率立马提高了一倍。
但是这还只是用了磁铁“吸引”的特性,别忘了磁铁还有“排斥”的特性。如果我们再同时驱动另外一组线圈,让上一组线圈“吸引”转子的时候,另外一组线圈“排斥”转子,那么我们的转子将会获得更高的驱动力!如下图:

原来的A,B,C三个绕组是各自独立的,因此控制起来非常麻烦。那如果我们把A,B,C三个绕组接在一起,拼成一个“星形连接(star arrangement)”,本来三个绕组,引出六根线;现在引出的线减少到只有三根线。
电源正极接在右上角的A绕组输入,而电源的负极接在了左下角的B绕组输出。这个时候A绕组和B绕组同时被驱动,而且其极性正好相反,实现了三个绕组独立驱动时一样的效果!
所以只要按照这个顺序:AB-AC-BC-BA-CA-CB,这六个节拍,依次循环驱动定子的绕组,转子就能一直旋转下去!

无刷电机的驱动电流有两种,一种是梯形波(一般是“方波”),另一种是正弦波。有时候把前一种叫直流无刷电机,后一种叫交流伺服电机。
三、直流有刷电机
电机的基本原理就是电磁感应:旋转磁场带动转子转动。
电动机是由定子和转子组成,一个产生旋转磁场,一个为磁极,电机的转子(轴承)就转起来了。
这便实现了 电能->磁能->机械能的转换

四、步进电机(Stepper motor)(开环)(控制电机3)


原理:将电脉冲转化为角位移。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。那么就需要驱动器来接收脉冲信号并转化为步进电机的角位移,当然还需要要发送脉冲的控制器或者PLC,还需要给控制器或者驱动器供电的开关电源等。这些是最基本的构成要素。
使用输出频率控制速度和加速度。
一般步进电机使用ULN2003驱动的,直流电机一般用(H桥)L298N来驱动。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
依次改变绕组的磁场就会使转子正转或者反转,比如通电的方向为A-B-C-D时,电机正转,反方向通电时,电机反转。
一般电机的驱动方式为八拍方式驱动:A AB B BC C CD D DA
还有一种方式为四拍方式驱动:AB-BC-CD-DA-AB
目前,比较常用的步进电动机包括反应式步进电动机(VR)、永磁式步进电动机(PM)、混合式步进电动机(HB)和单相式步进电动机等。
由于步进电动机不需要A/D转换,能够直接将数字脉冲信号转化成为角位移,所以一直被认为是最理想的数控机床执行元件。 除了在数控机床上的应用,步进电机也可以用在其他的机械上,比如作为自动送料机中的马达,作为通用的软盘驱动器的马达,也可以应用在打印机和绘图仪中。
此外,步进电动机也存在许多缺陷;由于步进电机存在空载启动频率,所以步进电机可以低速正常运转,但若高于一定速度时就无法启动,并伴有尖锐的啸叫声;不同厂家的细分驱动器精度可能差别很大,细分数越大精度越难控制;并且,步进电机低速转动时有较大的振动和噪声。
五、普通直流电机
普通电机是我们平时间的比较多的电机,电动玩具,刮胡刀等里面都有。一般只有两个引脚,用电池的正负极接上两个引脚就会转起来,然后电池得正负极再相反的接在两引脚上电机也会向反转。这种电机有转速过快,扭力过小的特点,一般不直接用在智能小车上。

六、减速电机
减速电机就是普通电机加上了减速箱,这样便降低了转速,增加了扭力,使得普通电机有的更广泛的使用空间。


减速电机一般都是用智能小车上,而对于电机的控制一般都用H桥方案,L298芯片就是这种原理。
而调速一般采用PWM(脉宽调制)机制,单片机利用定时器控制产生占空比可变的 PWM 波或者直接硬件PWM输出不同大小的波形来控制小车整体速度。
七、力矩电动机(控制电机4)
所谓的力矩电动机是一种扁平型多极永磁直流电动机。其电枢有较多的槽数、换向片数和串联导体数,以降低转矩脉动和转速脉动。力矩电动机有直流力矩电动机和交流力矩电动机两种。
其中,直流力矩电动机的自感电抗很小,所以响应性很好;其输出力矩与输入电流成正比,与转子的速度和位置无关;它可以在接近堵转状态下直接和负载连接低速运行而不用齿轮减速,所以在负载的轴上能产生很高的力矩对惯性比,并能消除由于使用减速齿轮而产生的系统误差。
交流力矩电动机又可以分为同步和异步两种,目前常用的是鼠笼型异步力矩电动机,它具有低转速和大力矩的特点。一般地,在纺织工业中经常使用交流力矩电动机,其工作原理和结构和单相异步电动机的相同,但是由于鼠笼型转子的电阻较大,所以其机械特性较软。
八、开关磁阻电动机(控制电机5)
开关磁阻电动机是一种新型调速电动机,结构极其简单且坚固,成本低,调速性能优异,是传统控制电动机强有力竞争者,具有强大的市场潜力。
九、以下为功率电动机
1 直流电动机
直流电动机是出现最早的电动机,大约在19世纪末,其大致可分为有换向器和无换向器两大类。直流电动机有较好的控制特性直流电动机在结构、价格、维护方面都不如交流电动机,但是由于交流电动机的调速控制问题一直未得到很好的解决方案,而直流电动机具有调速性能好、起动容易、能够载重起动等优点,所以目前直流电动机的应用仍然很广泛,尤其在可控硅直流电源出现以后。
2 异步电动机
异步电动机是基于气隙旋转磁场与转子绕组感应电流相互作用产生电磁转矩而实现能量转换的一种交流电机。异步电动机一般为系列产品,品种规格繁多,其在所有的电动机中应用最为广泛,需量最大;目前,在电力传动中大约有90%的机械使用交流异步电动机,所以,其用电量约占总电力负荷的一半以上。
异步电动机具有结构简单,制造、使用和维护方便,运行可靠以及质量较小,成本较低等优点。并且,异步电机有较高的运行效率和较好的工作特性,从空载到满载范围内接近恒速运行,能满足大多数工农业生产机械的传动要求。异步电动机主要广泛应用于驱动机床、水泵、鼓风机、压缩机、起重卷扬设备、矿山机械、轻工机械、农副产品加工机械等大多数工农生产机械以及家用电器和医疗器械等。
在异步电动机中较为常见的是单相异步电动机和三相异步电动机,其中三相异步电动机是异步电动机的主体。而单相异步电动机一般用于三相电源不方便的地方,大部分是微型和小容量的电机,在家用电器中应用比较多,例如电扇、电冰箱、空调、吸尘器等。
3 同步电动机
所谓同步电动机就是在交流电的驱动下,转子与定子的旋转磁场同步运行的电动机。同步电动机的定子和异步电动机的完全一样;但其转子有“凸极式”和“隐极式”两种。凸极式转子的同步电动机结构简单、制造方便,但是机械强度较低,适用于低速运行场合;隐极式同步电动机制造工艺复杂,但机械强度高,适用于高速运行场合。
同步电动机的工作特性与所有的电动机一样, 同步电动机也具有“可逆行”,即它能按发电机方式运行,也可以按电动机方式运行。
同步电动机主要用于大型机械,如鼓风机、水泵、球磨机、压缩机、轧钢机以及小型、微型仪器设备或者充当控制元件;其中三相同步电动机是其主体。此外,还可以当调相机使用,向电网输送电感性或者电容性无功功率。
●信号电机
1 位置信号电机
目前,最有代表性的位置信号电机:旋转变压器、感应同步器和自整角机。
旋转变压器本质上是可以随意改变一次绕组和二次绕组耦合程度的变压器。其结构和绕线式异步电动机相同,定子和转子各有两组相互垂直的分布绕组,转子绕组利用滑环和电刷与外电路联接。当一次绕组励磁以后,二次绕组的输出电压和转子的转角成正弦、余弦、线性或者其他函数关系,可以用于计算装置中的坐标变换和三角运算,还可以在控制系统中作为角度数据传输和移相器使用。
感应同步器是一种高精度的位置或角度检测元件,有圆盘式和直线式两种。圆盘式感应同步器用来测量转角位置;而直线式感应同步器用来测量线位移。
自整角机是一种感应式机电元件,被广泛地应用于随动系统中,作为角度传输、变换和指示的装置。在控制系统中经常两台或者多台联合使用,使机械上互不相连的两根或多根轴能够自动地保持相同的转角变化,或者同步旋转。
2 速度信号电机
最有代表性的速度信号电机是测速发电机,其实质上是一种将转速变换为电信号的机电磁元件,其输出电压与转速成正比。从工作原理上讲,它属于“发电机”的范畴。测速发电机在控制系统中主要作为阻尼元件、微分元件、积分元件和测速元件来使用。
测速发电机有直流和交流之分;而直流测速发电机又有他励和永磁之分,其结构和工作原理与小功率直流发电机相同,通常输出功率较小,作为计算元件时要求其输出电压的线性误差和温度误差低于一个上限。而交流测速发电机又有同步和异步之分;同步测速发电机包括:永磁式、感应式和脉冲式;异步测速发电机应用最广泛的是杯型转子异步测速发电机。
为了提高测速发电机的精确度和可靠性,目前,直流测速发电机出现了无刷结构的霍尔效应直流测速发电机。因为这种霍尔效应无刷直流测速发电机是一种无齿槽、无绕组的电机,所以它不会产生由于齿槽而存在的“齿槽谐波电势”,这种电机结构简单,便于小型化。


















 2635
2635

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











