









RoboCup仿真2D是人类足球比赛的模拟
(1)RoboCup仿真2D利用计算机模拟2D环境下的机器人进行足球比赛
(2) 比赛平台的设计充分体现了控制、通讯、传感和人体机能等方面的实际限制
(3)仿真2D机器人足球的研究重点放在于球队的高层功能:个人技术、局部战术、全局策略等
仿真2D机器人平台的特点
仿真2D平台提供了一个全分布的、包括合作与对抗的多智能体实时环境,具有如下特点:
(1)问题规模巨大 - 状态空间和动作空间都是连续的
(2)大量不确定因素
(3)环境部分可观察且存在噪音
(4)行动结果具有不确定性
(5)受限的通信模型
(6)对手模型未知
(7) 实时系统
主要研究背景
(1)信息的不确定性,不完全性
2D里面的视觉信息是个典型例子
(2) 行动的不确定性
所有2D足球里面的行动都有很大误差
(3)多智能体博弈,决策
11个敌方球员,10个我方球员
(4)超大规模
行动和状态全是巨大的连续空间
智能体,决策和博弈
(1) 自主智能体是指那些于复杂动态环境中,自治地 感知环境信息,自主采取行动,并实现一系列预先设定的目标或任务的计算系统。
2D仿真是个典型的多智能体决策问题。
决策问题的建模往往又基于状态和效用。
效用理论:反应智能体在世界状态之间的偏好。
(2)博弈
经典问题:囚徒困境
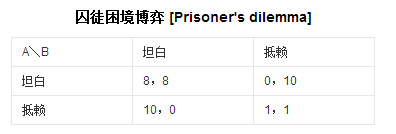
对2D来说问题对手模型未知,问题规模巨大,不确定性强。
(3)决策
1)搜索算法
状态抽象
深度优先搜索
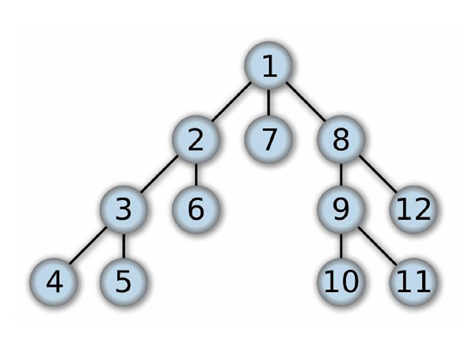
启发式搜索:优先扩展那些“更有价值”的状态,如蚁群算法等
2)建模思路:基于MAXQ的分层分解模型
求解算法思路:启发式搜索
马尔可夫决策过程(Markov Decision Processes,MDPs):描述一个带有部分行动不确定性的理论框架。
框架包括状态(S),行动(A),行动转移函数(带有概率)(P(s,a,s’)),和收益函数R(s,a,s’),衰减因子r ([0,1])。
基本动作框架如下:
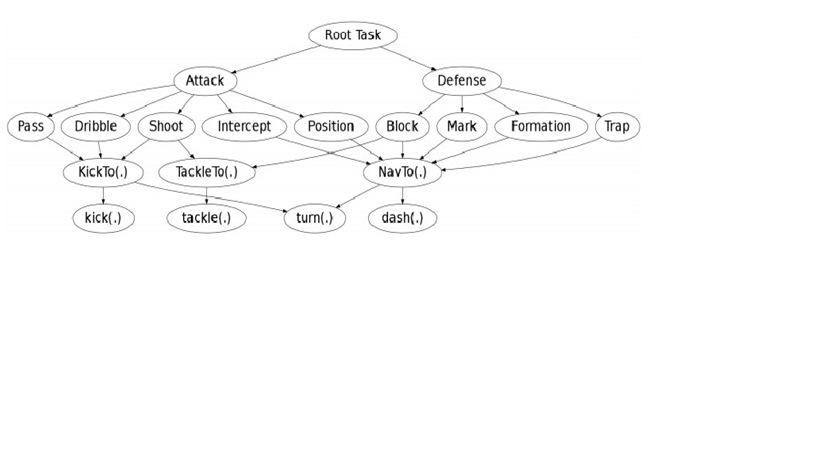
具体实现
(1) 不确定性
将所有不确定性统一抽象到状态转移的不确定性上, 用这个思路回避对手建模
(2)超大规模的决策空间
限制搜索的深度和广度,利用启发式和一些经验条件剪枝
(3)收益矩阵稀疏
把启发式作为收益函数针对不同的情况要做不同的调整和设定.















 7680
7680











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









