







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
近年来,在工程和科学领域引入了几种元启发式算法来解决现实生活中的优化问题。在这项研究中,提出了一种新的受自然启发的元启发式算法,称为蛇优化器 (SO),以解决模仿蛇特殊交配行为的各种优化任务。如果存在的食物量足够且温度低,每条蛇(雄性/雌性)都会争夺最佳伴侣。这项研究在数学上模拟和模拟了觅食和繁殖行为和模式,以提出一种简单有效的优化算法。为了验证所提出方法的有效性和优越性,SO 在 29 个无约束的进化计算大会 (CEC) 2017 基准函数和四个受约束的现实世界工程问题上进行了测试。将 SO 与其他 9 种著名的和新开发的算法进行比较,例如线性种群大小减少-差分进化的成功历史适应 (L-SHADE)、与 L-SHADE 结合的集成正弦曲线 (LSHADE-EpSin)、协方差矩阵适应进化策略 (CMAES)、土狼优化算法 (COA)、蛾火焰优化、哈里斯鹰优化器、热交换优化、蚱蜢优化算法和鲸鱼优化算法。实验结果和统计比较证明了 SO 在不同景观上的勘探开发平衡和收敛曲线速度的有效性和效率。
⛄ 部分代码
close all;
clear ;
clc;
%%
% TestProblem测试问题说明:
%一共46个多目标测试函数,详情如下:
%1-5:ZDT1、ZDT2、ZDT3、ZDT4、ZDT6
%6-12:DTLZ1-DTLZ7
%13-22:wfg1-wfg10
%23-32:uf1-uf10
%33-42:cf1-cf10
%43-46:Kursawe、Poloni、Viennet2、Viennet3
%47 盘式制动器设计(工程应用) 温泽宇,谢珺,谢刚,续欣莹.基于新型拥挤度距离的多目标麻雀搜索算法[J].计算机工程与应用,2021,57(22):102-109.
%%
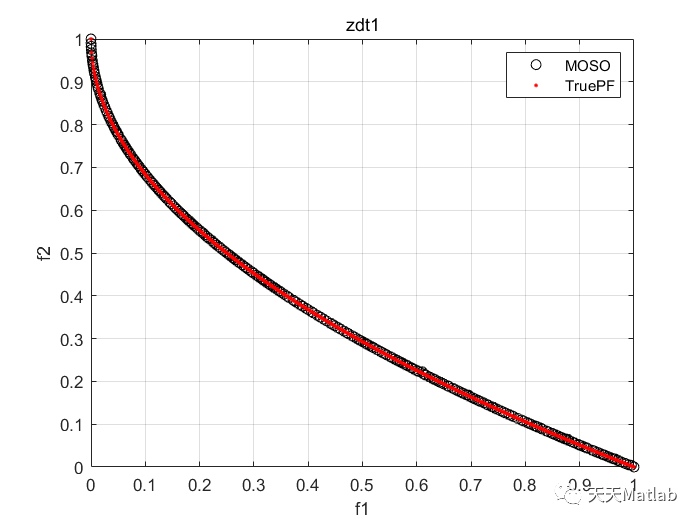
TestProblem=1;%1-47
MultiObj = GetFunInfo(TestProblem);
MultiObjFnc=MultiObj.name;%问题名
% Parameters
params.Np = 200; % Population size 种群大小
params.Nr = 300; % Repository size 外部存档中最大数目,可适当调整大小,越大,最终获得的解数目越多
params.maxgen =300; % Maximum number of generations 最大迭代次数
params.ngrid = 30; % Number of grids in each dimension
params.maxvel = 5; % Maxmium vel in percentage
% MOSO
REP = MOSO(params,MultiObj);
%% 画结果图
figure(2)
if(size(REP.pos_fit,2)==2)
h_rep = plot(REP.pos_fit(:,1),REP.pos_fit(:,2),'ok'); hold on;
if(isfield(MultiObj,'truePF'))
h_pf = plot(MultiObj.truePF(:,1),MultiObj.truePF(:,2),'.r'); hold on;
legend('MOSO','TruePF');
else
legend('MOSO');
end
grid on; xlabel('f1'); ylabel('f2');
end
if(size(REP.pos_fit,2)==3)
h_rep = plot3(REP.pos_fit(:,1),REP.pos_fit(:,2),REP.pos_fit(:,3),'ok'); hold on;
if(isfield(MultiObj,'truePF'))
h_pf = plot3(MultiObj.truePF(:,1),MultiObj.truePF(:,2),MultiObj.truePF(:,3),'.r'); hold on;
legend('MOSO','TruePF');
else
legend('MOSO');
end
grid on; xlabel('f1'); ylabel('f2'); zlabel('f3');
end
title(MultiObjFnc)
Obtained_Pareto=REP.pos_fit;
if(isfield(MultiObj,'truePF'))%判断是否有参考的PF
True_Pareto=MultiObj.truePF;
%% Metric Value
% ResultData的值分别是IGD、GD、HV、Spacing (HV越大越好,其他指标越小越好)
ResultData=[IGD(Obtained_Pareto,True_Pareto),GD(Obtained_Pareto,True_Pareto),HV(Obtained_Pareto,True_Pareto),Spacing(Obtained_Pareto)];
else
%计算每个算法的Spacing,Spacing越小说明解集分布越均匀
ResultData=Spacing(Obtained_Pareto);%计算的Spacing
end
%%
% Display info
disp('Repository fitness values are stored in REP.pos_fit');
disp('Repository particles positions are store in REP.pos');
⛄ 运行结果
⛄ 参考文献
[1]黄从智, 李卓勇. 一种基于改进多目标蛇群优化算法的超超临界机组协调控制系统节能优化方法:.
[2]李金璐. 一种基于蛇优化算法的微电网多目标优化配置方法:.
⛳️ 完整代码
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
















 1622
1622











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











