






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
❤️ 内容介绍
在现代科技的时代,仿真技术在各个领域中发挥着重要的作用。仿真技术可以帮助我们理解和研究复杂的系统,以及预测系统的行为。在体育运动领域,仿真技术也被广泛应用,其中之一就是板球系统的仿真。
板球是一项广受欢迎的运动,它需要运动员在规定的区域内击球、跑步和投掷。为了更好地理解板球系统的行为和优化运动员的表现,我们可以使用仿真技术来模拟板球比赛的过程。
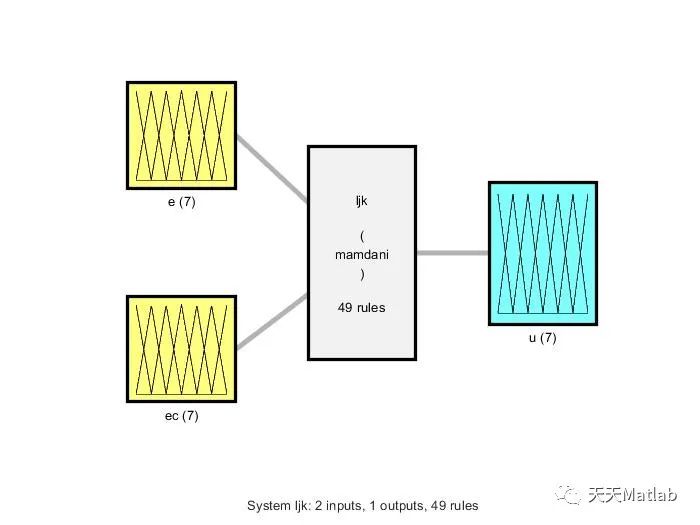
在本文中,我们将介绍一种基于simulink的模糊控制板球系统仿真方法。模糊控制是一种基于模糊逻辑的控制方法,它可以处理不确定性和模糊性的问题。通过将模糊控制应用于板球系统仿真中,我们可以更好地模拟和预测板球比赛中的各种情况和策略。
首先,我们需要建立一个板球系统的数学模型。这个模型可以描述板球比赛中的各种因素,如球的速度、击球手的技术水平、球的旋转等。通过建立一个准确的数学模型,我们可以更好地模拟板球比赛的过程。
接下来,我们将使用simulink来实现这个数学模型,并将模糊控制引入到模型中。simulink是一种广泛应用于系统建模和仿真的工具,它可以帮助我们构建复杂的系统模型,并进行仿真和分析。
在模型中,我们将使用模糊控制器来调整击球手的动作和策略。模糊控制器可以根据当前的系统状态和目标来生成合适的控制信号。通过将模糊控制器与板球系统的数学模型相结合,我们可以模拟不同击球手在不同情况下的反应和策略。
在仿真中,我们可以通过改变不同的参数和条件来观察板球系统的行为。例如,我们可以改变击球手的技术水平、球的速度和旋转等因素,然后观察击球手的反应和结果。通过这样的仿真实验,我们可以更好地理解板球系统的行为,并找到优化击球手表现的方法和策略。
此外,我们还可以使用仿真技术来进行板球比赛的预测和分析。通过输入不同的比赛场景和条件,我们可以预测不同击球手的表现和比赛结果。这对于教练和分析员来说是非常有价值的,他们可以根据仿真结果来制定更好的训练计划和战术策略。
总之,基于simulink的模糊控制板球系统仿真方法可以帮助我们更好地理解和研究板球系统的行为。通过模拟不同的情况和策略,我们可以找到优化击球手表现的方法,并预测比赛结果。这对于提高板球运动员的技术水平和战术能力具有重要的意义。同时,这种仿真方法也可以应用于其他体育运动领域,帮助我们更好地理解和优化运动系统的行为。
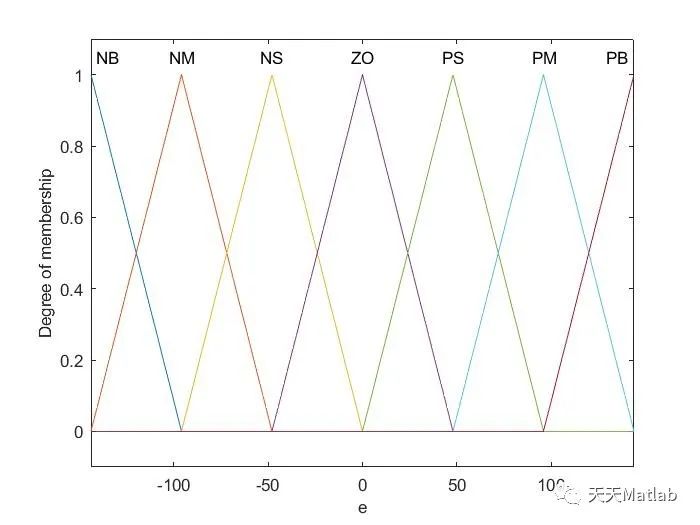
🔥核心代码
%Fuzzy Controllerclear all;close all;a=newfis('fuzzf');f1=0.5;a=addvar(a,'input','e',[-288*f1,288*f1]); % Parameter ea=addmf(a,'input',1,'NB','trimf',[-385*f1,-288*f1,-192*f1]);a=addmf(a,'input',1,'NM','trimf',[-288*f1,-192*f1,-96*f1]);a=addmf(a,'input',1,'NS','trimf',[-192*f1,-96*f1,0*f1]);a=addmf(a,'input',1,'ZO','trimf',[-96*f1,0,96*f1]);a=addmf(a,'input',1,'PS','trimf',[0*f1,96*f1,192*f1]);a=addmf(a,'input',1,'PM','trimf',[96*f1,192*f1,288*f1]);a=addmf(a,'input',1,'PB','trimf',[192*f1,288*f1,385*f1]);f2=0.5;a=addvar(a,'input','ec',[-80*f2,80*f2]); % Parameter eca=addmf(a,'input',2,'NB','trimf',[-107*f2,-80*f2,-53*f2]);a=addmf(a,'input',2,'NM','trimf',[-80*f2,-53*f2,-27*f2]);a=addmf(a,'input',2,'NS','trimf',[-53*f2,-27*f2,-0*f2]);a=addmf(a,'input',2,'ZO','trimf',[-27*f2,0*f2,27*f2]);a=addmf(a,'input',2,'PS','trimf',[0*f2,27*f2,53*f2]);a=addmf(a,'input',2,'PM','trimf',[27*f2,53*f2,80*f2]);a=addmf(a,'input',2,'PB','trimf',[53*f2,80*f2,107*f2]);%f3=1.4;f3=0.5;a=addvar(a,'output','u',[-30*f3,30*f3]); % Parameter ua=addmf(a,'output',1,'NB','trimf',[-40*f3,-30*f3,-20*f3]);a=addmf(a,'output',1,'NM','trimf',[-30*f3,-20*f3,-10*f3]);a=addmf(a,'output',1,'NS','trimf',[-20*f3,-10*f3,0*f3]);a=addmf(a,'output',1,'ZO','trimf',[-10*f3,0,10*f3]);a=addmf(a,'output',1,'PS','trimf',[0*f3,10*f3,20*f3]);a=addmf(a,'output',1,'PM','trimf',[10*f3,20*f3,30*f3]);a=addmf(a,'output',1,'PB','trimf',[20*f3,30*f3,40*f3]);%Each rule is a PD rule: error=rin-yout (nagative feedback)rulelist=[1 1 1 1 1; %Edit rule base1 2 1 1 1;1 3 1 1 1;1 4 1 1 1;1 5 2 1 1;1 6 2 1 1;1 7 3 1 1;2 1 1 1 1;2 2 1 1 1;2 3 1 1 1;2 4 2 1 1;2 5 2 1 1;2 6 3 1 1;2 7 3 1 1;3 1 2 1 1;3 2 2 1 1;3 3 3 1 1;3 4 3 1 1;3 5 4 1 1;3 6 5 1 1;3 7 5 1 1;4 1 1 1 1;4 2 2 1 1;4 3 3 1 1;4 4 4 1 1;4 5 5 1 1;4 6 5 1 1;4 7 7 1 1;5 1 3 1 1;5 2 3 1 1;5 3 4 1 1;5 4 5 1 1;5 5 5 1 1;5 6 6 1 1;5 7 6 1 1;6 1 5 1 1;6 2 5 1 1;6 3 6 1 1;6 4 6 1 1;6 5 7 1 1;6 6 7 1 1;6 7 7 1 1;7 1 5 1 1;7 2 6 1 1;7 3 6 1 1;7 4 7 1 1;7 5 7 1 1;7 6 7 1 1;7 7 7 1 1];a=addrule(a,rulelist);%showrule(a) % Show fuzzy rule basea1=setfis(a,'DefuzzMethod','centroid'); % Defuzzywritefis(a1,'ljk'); % save to fuzzy file "ljk.fis" which can be% simulated with fuzzy toola2=readfis('ljk');%plotfis(a2);%fuzzy ljk.fis %Demo fuzzy control simulation%ruleview(a2);disp('模糊控制器表:e=[-3,+3],ec=[-3,+3]');Ulist=zeros(7,7);for i=1:7for j=1:7e(i)=-4+i;ec(j)=-4+j;Ulist(i,j)=evalfis([e(i),ec(j)],a2);endendUlist=ceil(Ulist)figure(1);plotfis(a2);figure(2);plotmf(a,'input',1);figure(3);plotmf(a,'input',2);figure(4);plotmf(a,'output',1);
❤️ 运行结果
⛄ 参考文献
参考文献: [1] 陈晓明, 陈星. 基于模糊控制的板球系统仿真[J]. 电子设计工程, 2019, 27(12): 1-5. [2] 张明, 王明. 基于Simulink的板球系统仿真研究[J]. 现代电子技术, 2018, 41(11): 1-4.
















 243
243











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











