





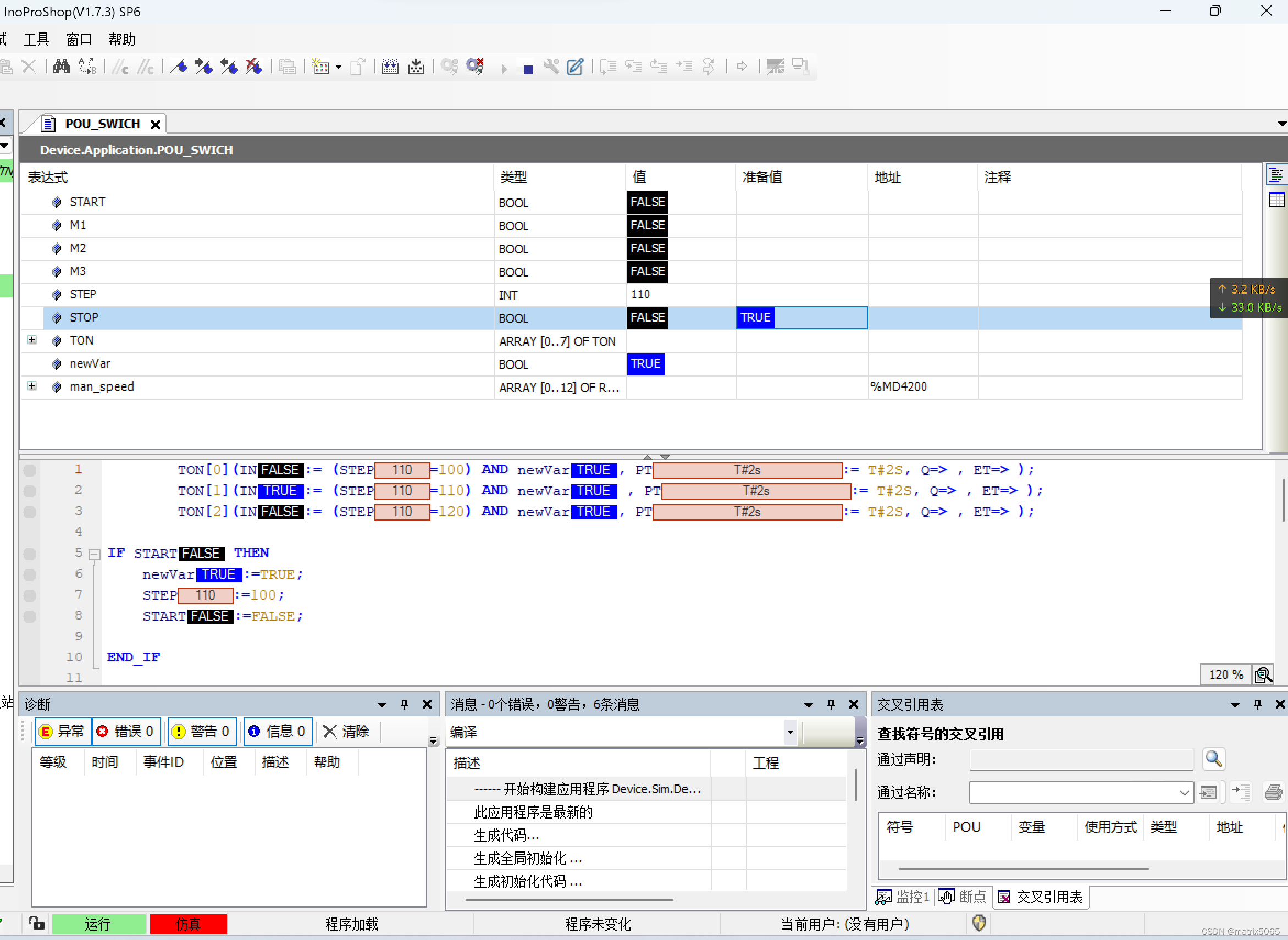
使用Switch Case语句可以有效的控制动作
如图所示通过更改Step,来回有序的跳转
汇川不亏工控小华为,仿真做的有模有样了;
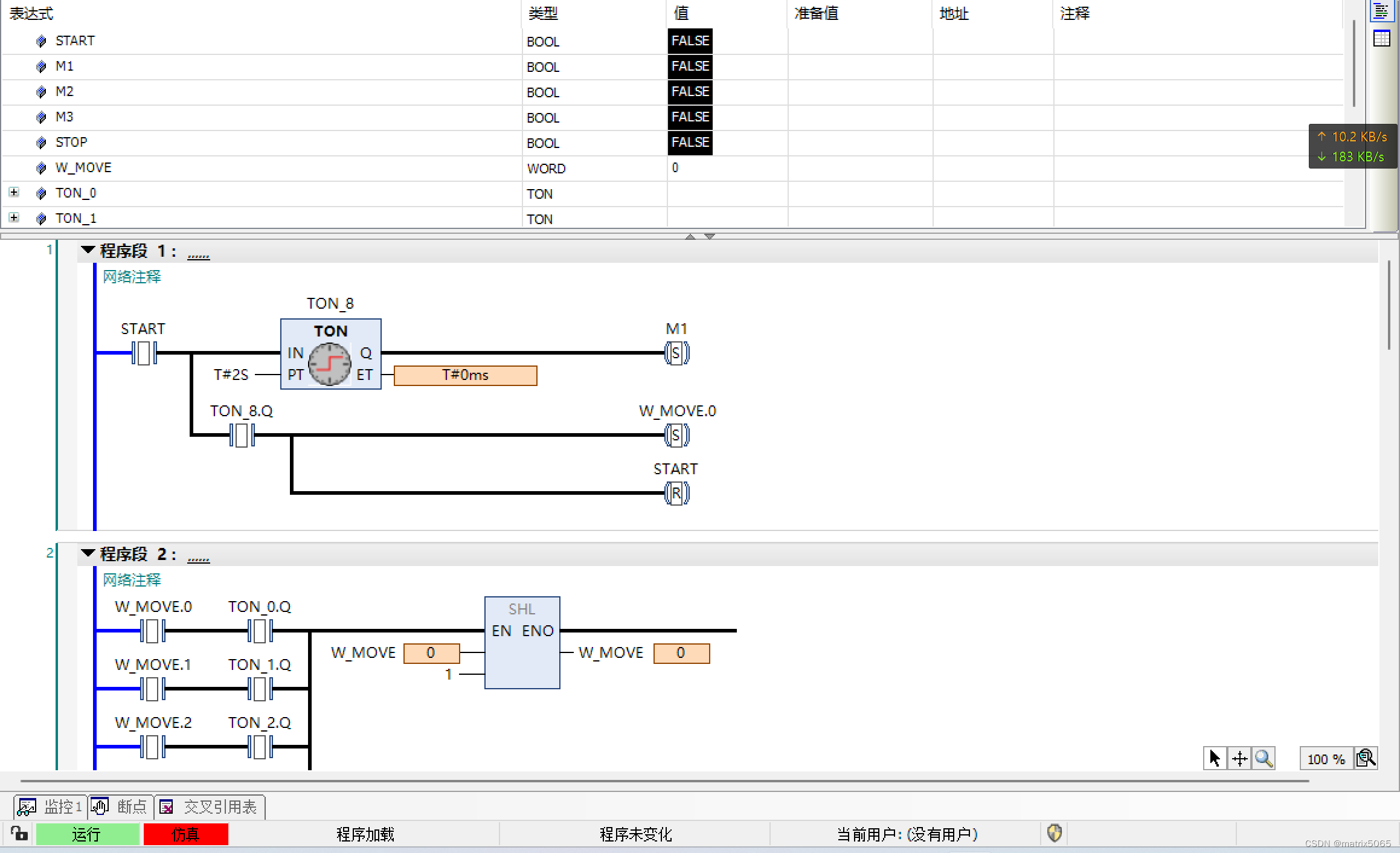
下图是梯形图,位移指令实现:

使用Switch Case语句可以有效的控制动作
如图所示通过更改Step,来回有序的跳转
汇川不亏工控小华为,仿真做的有模有样了;
下图是梯形图,位移指令实现:
 3572
1896
3572
1896

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























