







 本文详细介绍了变量的创建方法及赋值规则,并解释了不同数据类型的特点。特别针对时间类型进行了深入探讨,包括其格式、单位及其应用场景。
本文详细介绍了变量的创建方法及赋值规则,并解释了不同数据类型的特点。特别针对时间类型进行了深入探讨,包括其格式、单位及其应用场景。
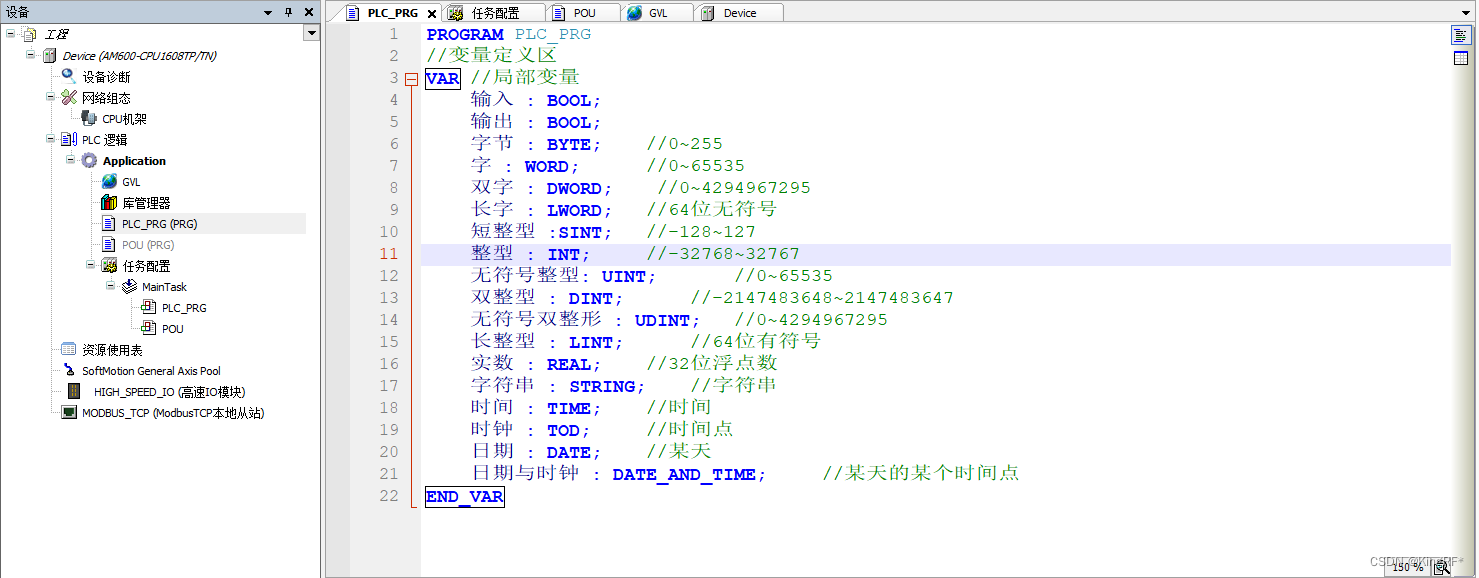
变量的创建 , 变量名 【冒号】 数据类型 【分号】;
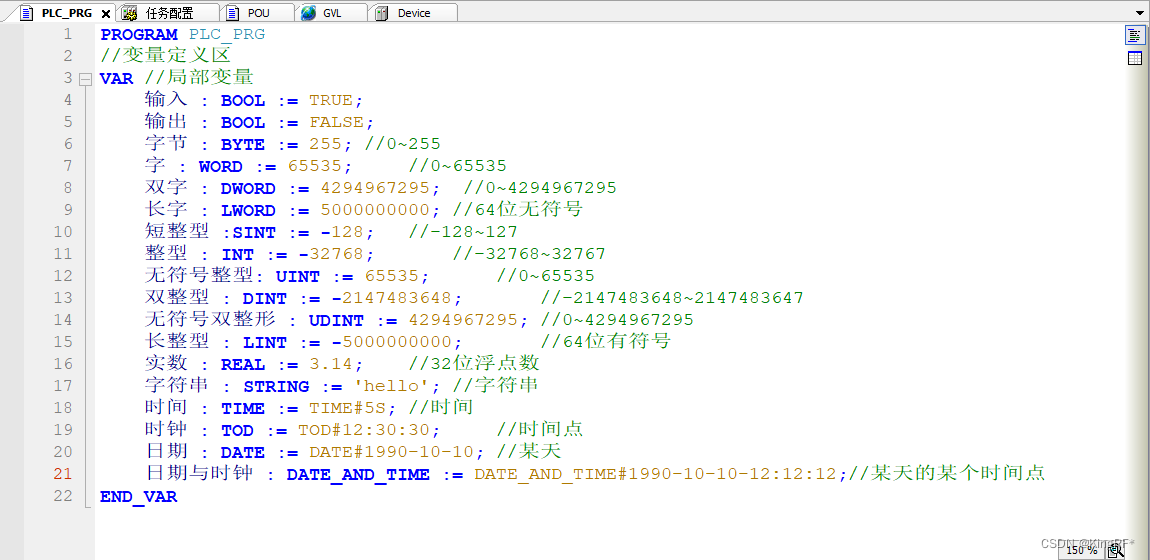
创建变量并赋初值,变量名【冒号】数据类型【冒号等号】值【分号】;

如果赋值超过其类型的取值范围,值的下面会标波浪线;
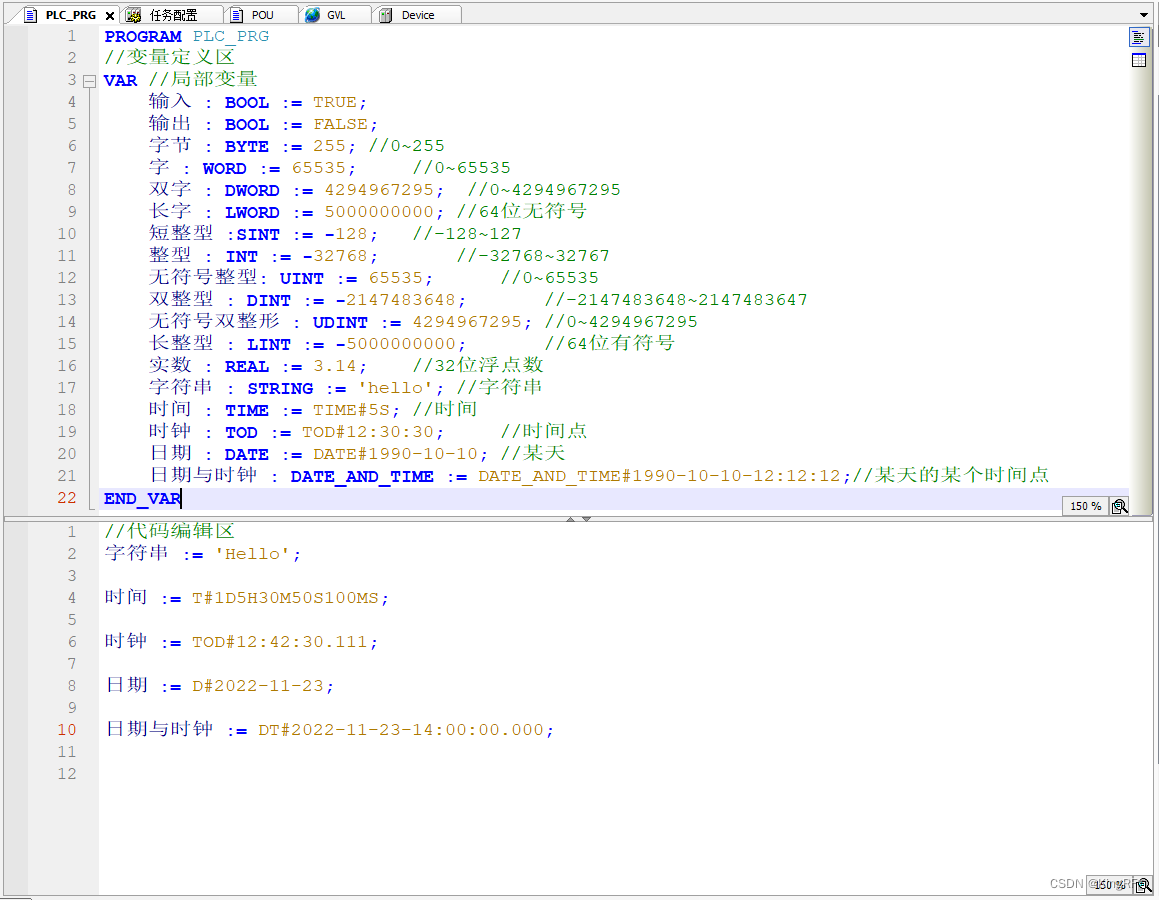
字符串用单引号表示;
时间:精度毫秒,前缀T#或TIME#表示,默认单位为毫秒,T#1000为1000ms;
时间的单位:毫秒ms,秒s,分钟m,小时h,天数d;
T#1D5H30M50S100MS,一天五小时三十分钟五十秒一百毫秒;
主要应用在定时器中;
日钟、日期、日期和时钟:某个时间点,主要用在日志文件;
变量的创建 , 变量名 【冒号】 数据类型 【分号】;
创建变量并赋初值,变量名【冒号】数据类型【冒号等号】值【分号】;
如果赋值超过其类型的取值范围,值的下面会标波浪线;
字符串用单引号表示;
时间:精度毫秒,前缀T#或TIME#表示,默认单位为毫秒,T#1000为1000ms;
时间的单位:毫秒ms,秒s,分钟m,小时h,天数d;
T#1D5H30M50S100MS,一天五小时三十分钟五十秒一百毫秒;
主要应用在定时器中;
日钟、日期、日期和时钟:某个时间点,主要用在日志文件;
 6074
3711
1975
6074
3711
1975

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























