







创世纪之初,上帝说,要有光,于是,就有了光
我们所处的世界,其实就是一个充满光的世界,光线是这个世界最普通,最常见,最神奇的东西,无处不在,却又摸不着,物理学告诉我们,光是一种电磁波,而电磁波有电磁场,所以光,其实也有光场。
光场(Light Field)是空间中光线集合的完备表示,采集并显示光场就能在视觉上重现真实世界。全光函数(Plenoptic Function)包含7个维度,是表示光场的数学模型。全光函数可以表示为:
L ( x , y , z , ϕ , θ , λ , t ) L(x,y,z,\phi,\theta,\lambda,t) L(x,y,z,ϕ,θ,λ,t)
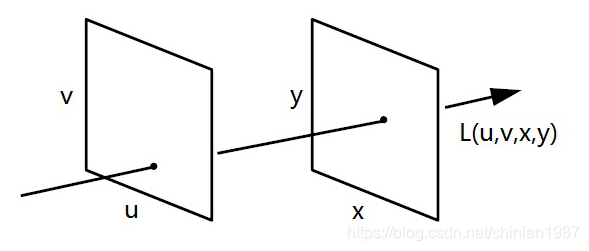
其中, x , y , z x, y, z x,y,z 表示空间位置, ϕ , θ \phi, \theta ϕ,θ 表示方向, λ \lambda λ 表示波长, t t t 表示时间,我们最常见的摄影或者显示,主要利用了光线的位置和波长 L ( x , y , z , λ ) L(x,y,z,\lambda) L(x,y,z,λ),很少会用到光线的方向信息,要想完全捕获环境中所有光线的信息,这个数据量是非常庞杂的,斯坦福大学的 M.levory和P.Hanraham 将全光函数进行了简化,变成了的一种四维信号: L ( u , v , s , t ) L(u, v, s, t) L(u,v,s,t),L 表示光线的强度,(u, v) 和 (s, t) 分别为光线与两个平面的交点坐标。在四维坐标空间中,一条光线对应光场的一个采样点,如下图所示:
- 插入图像
其中 ( u , v ) (u, v) (u,v) 表示透镜光瞳所在的坐标, ( s , t ) (s, t) (s,t) 表示传感器所在的平面坐标,成像的时候,光线先经过透镜的光瞳,然后到达传感器上,传统的成像可以表示成:
I ( s , t ) = ∬ L ( u , v , s , t ) d u d v I(s,t) = \iint L(u, v, s, t)dudv I(s,t)=∬L(u,v,s,t)dudv
上面的式子表示,真实世界里的一个物点,发出的光线,经过光瞳之后汇聚到传感器上对应的一个像点上。这样的成像,只能记录光线的强度,无法获得光线的方向。
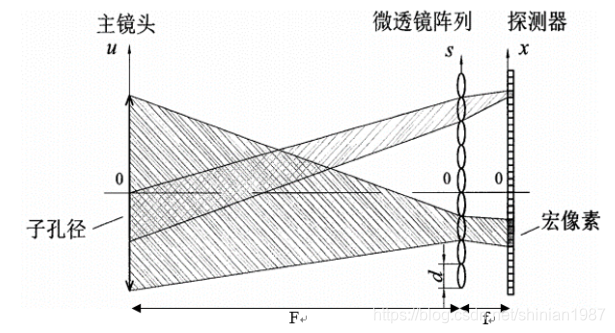
而光场相机与传统成像不同,光场成像需要利用二维的探测器像面同时记录光场的四维信息,即二维位置分布和二维传输方向。为了实现四维信息向二维平面的转换,必须对四维光场进行重采样和分布。光场相机有几种不同的实现方式,比较常见的有 相机阵列,微透镜阵列以及可编程光圈,相机阵列是最早的一种实现方式,后来斯坦福大学的博士吴义仁(Ren Ng)毕业后创立了 Lytro 相机公司,推出了世界上第一款消费级光场相机,采用的是在传感器前面,安置了一排微透镜阵列,如下图所示:
- 插入图像
镜头、微透镜阵列、传感器三者之间位置关系为:微透镜阵列放置在主镜头的焦平面附近,而传感器放置在微透镜的焦平面附近。
不同方向的光线经过主镜头进入相机内部,汇聚到微透镜阵列上不同的微透镜上,经过微透镜后又发散成若干条光线分别到达传感器的感光元件上。这里每一个微透镜视为一个宏像素,每一个(宏像素)微透镜后面对应 k × k k \times k k×k个元像素(感光单元)。这 k × k k \times k k×k 个元像素的亮度总和为最终宏像素的亮度,即宏像素的亮度为其对应所有元像素的积分。而每一个元像素对应通过前面微透镜的一条光线,在Lytro illum中, k × k k \times k k×k个元像素就可以记录 k × k k \times k k×k 条通过前面微透镜的不同方向的光线,所以Lytro illum一共可以记录的光线条数为 $ m \times n \times k \times k $, m × n m \times n m×n 为微透镜个数。
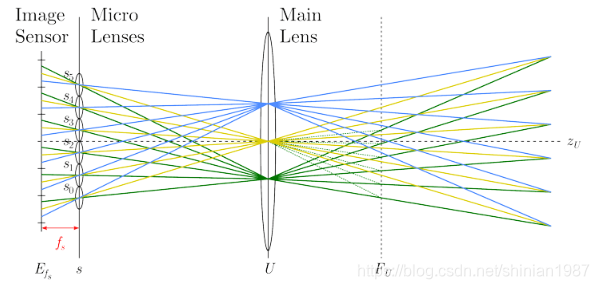
对比传统成像,我们可以看到,传统成像把一个物点发出的所有光线看成一束,都汇聚到一个像点上,而光场相机,把一个物点的光线分成了多束,分别汇聚到不同的像点上,很显然 k × k k \times k k×k 越大,意味着光线被分割的越细,意味着每个像点能接收到的光线越少, k × k k \times k k×k 一般也称为角分辨率,而 m × n m \times n m×n一般称为图像分辨率, k × k k \times k k×k 也称为视点数,类似在主透镜上开了 k × k k \times k k×k 个子孔径,每个子孔径都能成一个 m × n m \times n m×n 大小的图像,如下图所示,主透镜上,有三个虚拟的子孔径,每个子孔径都可以通过微透镜阵列,在传感器 sensor 上成不同的子图像
- 插入图像
光场相机的角分辨率和图像分辨率是一个 trade-off 的关系,因为 sensor 总的像素数一定,如果 k × k k \times k k×k 增加了,意味着 m × n m \times n m×n 就会减少,反之亦然。
光场图像的表示有很多不同的形式,因为完整的光场图像是一个思维的信息,如果算上颜色通道,就是一个五维的信息,这里不考虑颜色通道,光场数据可以表示成: L ( u , v , s , t ) L(u, v, s, t) L(u,v,s,t)
- 如果固定 ( u , v ) (u, v) (u,v),那么我们可以获得某一个视角下的子图像
- 如果固定 ( s , t ) (s, t) (s,t),那么我们可以获得某一个微透镜后面的一个宏像素
- 如果固定 ( u , s ) (u, s) (u,s),那么我们可以获得一个极线图,类似从图像阵列的某一列子图像中,抽取固定的一列拼接而成
- 如果固定 ( v , t ) (v, t) (v,t),那么我们同样可以获得一个极线图,从图像阵列的某一行子图像中,抽取固定的一行拼接而成
如下图所示:
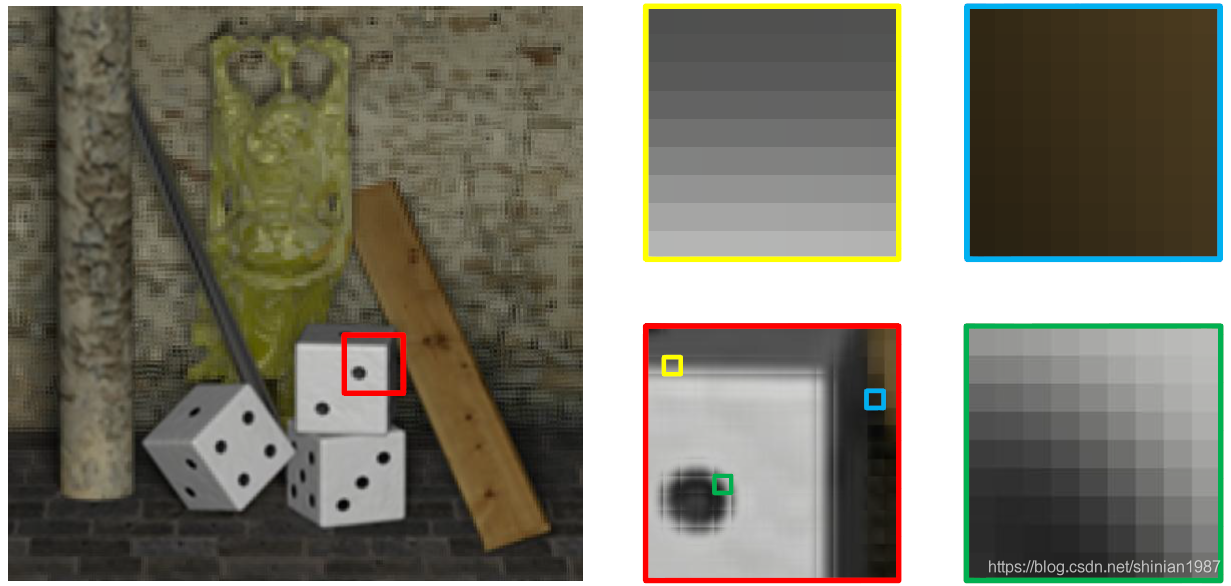
上图左边对应一个子图像,右边对应宏像素
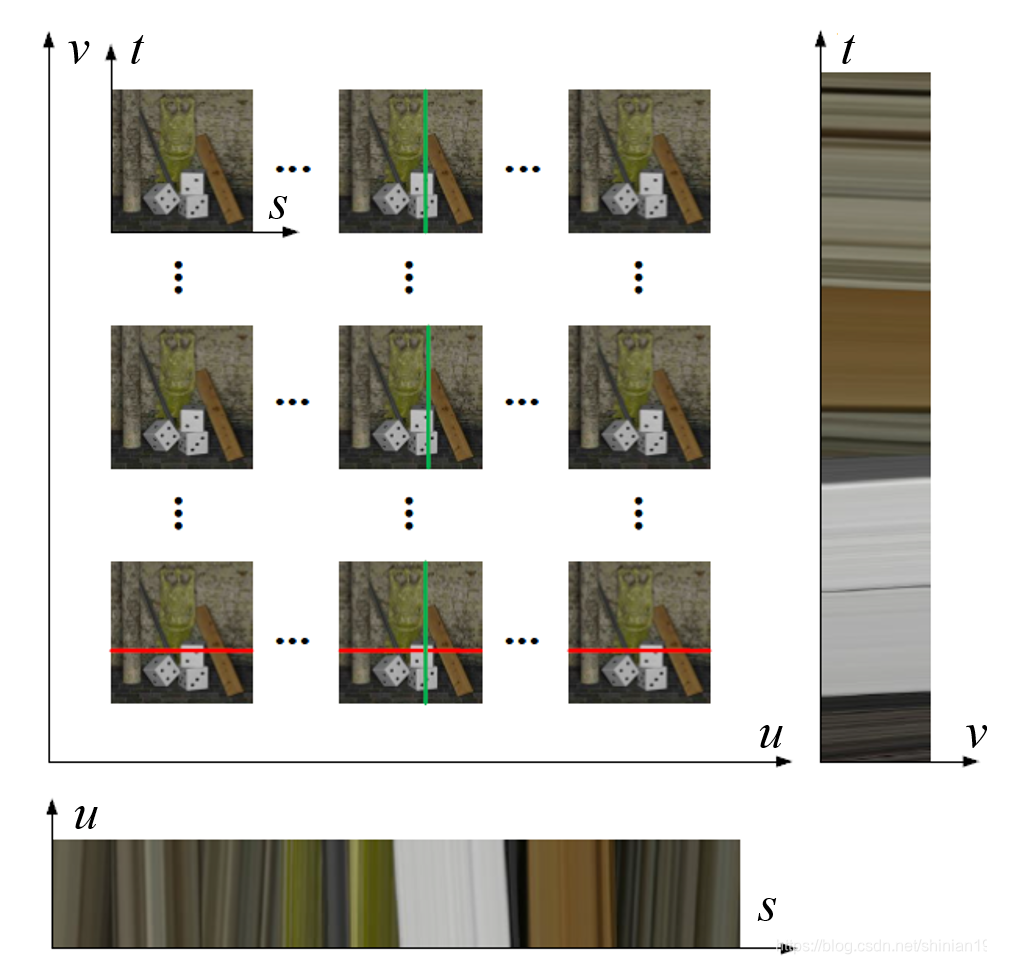
上图分别对应图像阵列,极线图
- 参考
https://www.vincentqin.tech/posts/light-field-depth-estimation/
https://www.cnblogs.com/riddick/p/6731130.html
http://www.plenoptic.info/pages/refocusing.html














 318
318











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









