







 本文介绍了基于深度学习的人脸复原模型CodeFormer,它由南洋理工大学和商汤科技联合开发,结合VQGAN和Transformer,可用于图像修复等领域。还探讨了盲人脸复原的挑战及处理方法。此外,讲解了该模型用C++的onnxruntime和Python进行推理部署的相关内容。
本文介绍了基于深度学习的人脸复原模型CodeFormer,它由南洋理工大学和商汤科技联合开发,结合VQGAN和Transformer,可用于图像修复等领域。还探讨了盲人脸复原的挑战及处理方法。此外,讲解了该模型用C++的onnxruntime和Python进行推理部署的相关内容。
一、人脸修复算法
1.算法简介
CodeFormer是一种基于AI技术深度学习的人脸复原模型,由南洋理工大学和商汤科技联合研究中心联合开发,它能够接收模糊或马赛克图像作为输入,并生成更清晰的原始图像。算法源码地址:https://github.com/sczhou/CodeFormer
这种技术在图像修复、图像增强和隐私保护等领域可能会有广泛的应用。算法是由南洋理工大学和商汤科技联合研究中心联合开发的,结合了VQGAN和Transformer。
VQGAN是一个生成模型,通常用于图像生成任务。它使用了向量量化技术,将图像编码成一系列离散的向量,然后通过解码器将这些向量转化为图像。这种方法通常能够生成高质量的图像,尤其在与Transformer等神经网络结合使用时。
Transformer是一种广泛用于自然语言处理和计算机视觉等领域的神经网络架构。它在序列数据处理中表现出色,也可以用于图像生成和处理任务。

在监控、安全和隐私保护领域,人脸图像通常会受到多种因素的影响,其中包括光照、像素限制、聚焦问题和人体运动等。这些因素可能导致图像模糊、变形或者包含大量的噪声。在这种情况下,尝试恢复清晰的原始人脸图像是一个极具挑战性的任务。
盲人脸复原是一个不适定问题(ill-posed problem),这意味着存在多个可能的解决方案,而且从有限的观察数据中无法唯一确定真实的原始图像。因此,在这个领域中,通常需要依赖先进的计算机视觉和图像处理技术,以及深度学习模型,来尝试改善模糊或受损图像的质量。
一些方法和技术可以用于处理盲人脸复原问题,包括但不限于:
深度学习模型: 使用卷积神经网络(CNN)和生成对抗网络(GAN)等深度学习模型,可以尝试从模糊或变形的人脸图像中恢复原始细节。
超分辨率技术: 超分辨率方法旨在从低分辨率图像中重建高分辨率图像,这也可以用于人脸图像复原。
先验知识: 利用先验知识,如人脸结构、光照模型等,可以帮助提高复原的准确性。
多模态融合: 结合不同传感器和信息源的数据,可以提高复原的鲁棒性。
然而,即使使用这些技术,由于问题的不适定性,完全恢复清晰的原始人脸图像仍然可能是一项极具挑战性的任务,特别是在极端条件下。在实际应用中,可能需要权衡图像质量和可用的信息,以达到最佳的结果。
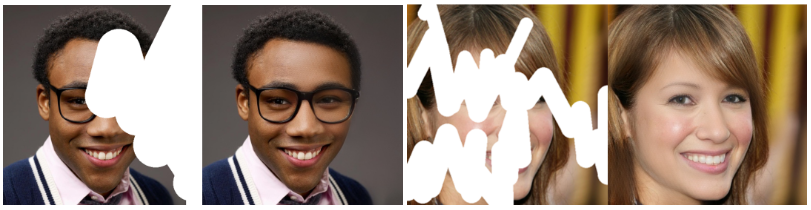
2.算法效果
在官方公布修复的人脸效果里面,可以看到算法在各种输入的修复效果:
老照片修复
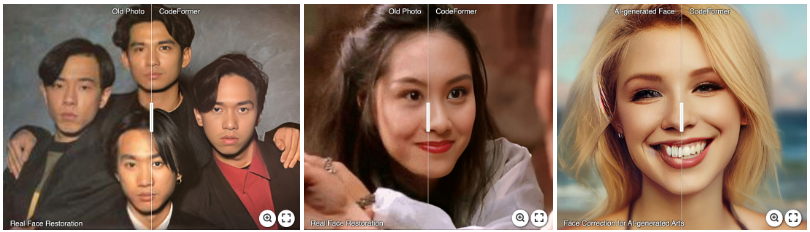
人脸修复

黑白人脸图像增强修复

人脸恢复
二、模型部署
如果想用C++进行模型推理部署,首先要把模型转换成onnx,转成onnx就可以使用onnxruntime c++库进行部署,或者使用OpenCV的DNN也可以,转成onnx后,还可以再转成ncnn模型使用ncnn进行模型部署。原模型可以从官方开源界面可以下载。
模型推理这块有两种做法,一是不用判断有没有人脸,直接对全图进行超分,但这种方法好像对本来是清晰的图像会出现bug,就是生成一些无法理解的处理。
1. C++使用onnxruntime部署模型
#include "CodeFormer.h"
CodeFormer::CodeFormer(std::string model_path)
{
//OrtStatus* status = OrtSessionOptionsAppendExecutionProvider_CUDA(sessionOptions, 0); ///nvidia-cuda加速
sessionOptions.SetGraphOptimizationLevel(ORT_ENABLE_BASIC);
std::wstring widestr = std::wstring(model_path.begin(), model_path.end()); ///如果在windows系统就这么写
ort_session = new Ort::Session(env, widestr.c_str(), sessionOptions); ///如果在windows系统就这么写
///ort_session = new Session(env, model_path.c_str(), sessionOptions); ///如果在linux系统,就这么写
size_t numInputNodes = ort_session->GetInputCount();
size_t numOutputNodes = ort_session->GetOutputCount();
Ort::AllocatorWithDefaultOptions allocator;
for (int i = 0; i < numInputNodes; i++)
{
input_names.push_back(ort_session->GetInputName(i, allocator));
Ort::TypeInfo input_type_info = ort_session->GetInputTypeInfo(i);
auto input_tensor_info = input_type_info.GetTensorTypeAndShapeInfo();
auto input_dims = input_tensor_info.GetShape();
input_node_dims.push_back(input_dims);
}
for (int i = 0; i < numOutputNodes; i++)
{
output_names.push_back(ort_session->GetOutputName(i, allocator));
Ort::TypeInfo output_type_info = ort_session->GetOutputTypeInfo(i);
auto output_tensor_info = output_type_info.GetTensorTypeAndShapeInfo();
auto output_dims = output_tensor_info.GetShape();
output_node_dims.push_back(output_dims);
}
this->inpHeight = input_node_dims[0][2];
this->inpWidth = input_node_dims[0][3];
this->outHeight = output_node_dims[0][2];
this->outWidth = output_node_dims[0][3];
input2_tensor.push_back(0.5);
}
void CodeFormer::preprocess(cv::Mat &srcimg)
{
cv::Mat dstimg;
cv::cvtColor(srcimg, dstimg, cv::COLOR_BGR2RGB);
resize(dstimg, dstimg, cv::Size(this->inpWidth, this->inpHeight), cv::INTER_LINEAR);
this->input_image_.resize(this->inpWidth * this->inpHeight * dstimg.channels());
int k = 0;
for (int c = 0; c < 3; c++)
{
for (int i = 0; i < this->inpHeight; i++)
{
for (int j = 0; j < this->inpWidth; j++)
{
float pix = dstimg.ptr<uchar>(i)[j * 3 + c];
this->input_image_[k] = (pix / 255.0 - 0.5) / 0.5;
k++;
}
}
}
}
cv::Mat CodeFormer::detect(cv::Mat &srcimg)
{
int im_h = srcimg 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2656
2656

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











