






一、为什么需要鱼眼镜头矫正?
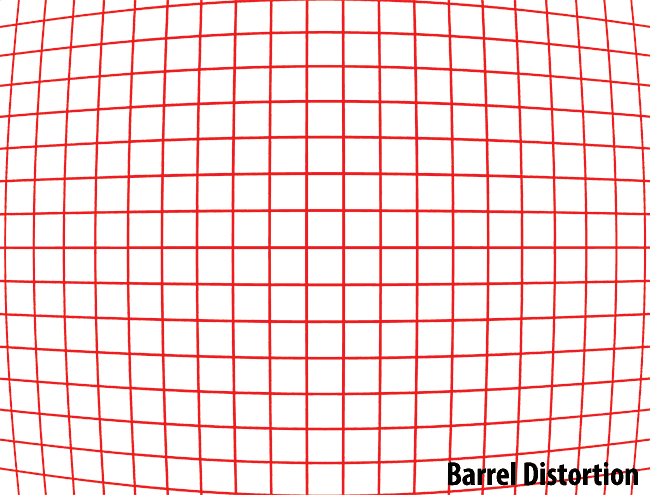
鱼眼镜头通过特殊的光学设计实现 180° 甚至更广的视野,广泛应用于全景相机、自动驾驶、安防监控等领域。但这种广角特性会引入严重的桶形畸变:直线边缘会向内弯曲(如图像边缘的门框变成弧线),物体尺寸在边缘区域会被拉伸。矫正的核心目标:将鱼眼镜头拍摄的畸变图像还原为接近人眼视觉的正常图像,便于后续的目标检测、图像拼接等处理。
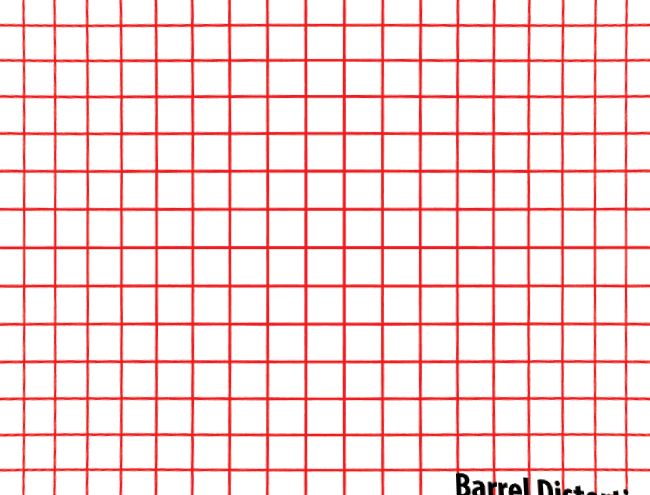
🌌 矫正前后效果对比(此处可插入图片)
矫正前图像(鱼眼畸变效果)
矫正后图像(畸变消除效果)
二、鱼眼矫正原理硬核解析
要理解鱼眼矫正,需从镜头成像的数学模型入手。鱼眼镜头的畸变本质是三维空间点投影到二维图像平面时的非线性变换,我们需要通过数学公式描述这种畸变,并通过逆变换 “还原” 真实坐标。
2.1 鱼眼镜头的成像模型
鱼眼镜头遵循等距投影模型(Equidistant Projection),其核心公式为: r = f ⋅ θ r = f \cdot \theta r=f⋅θ其中:
* r r r:理想无畸变图像中,像素点到光心(图像中心)的距离(单位:像素);
* f f f:镜头焦距(单位:像素);
* θ \theta θ:三维空间点与光轴的夹角(单位:弧度)。
但实际成像中,镜头的光学误差会导致 r r r偏离理想值,形成畸变。我们需要用畸变系数描述这种偏离。
2.2 畸变的数学表达式(径向畸变 + 切向畸变)
鱼眼镜头的畸变主要分为两类:
(1)径向畸变(Radial Distortion)
由镜头的球面形状引起,导致像素点沿径向(从中心到边缘的方向)偏离理想位置。数学表达式为: x d i s t o r t e d = x i d e a l ⋅ ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) x_{distorted} = x_{ideal} \cdot (1 + k_1 r^2 + k_2 r^4 + k_3 r^6) xdistorted=xideal⋅(1+k1r2+k2r4+k3r6) y d i s t o r t e d = y i d e a l ⋅ ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) y_{distorted} = y_{ideal} \cdot (1 + k_1 r^2 + k_2 r^4 + k_3 r^6) ydistorted=yideal⋅(1+k1r2+k2r4+k3r6)其中:
* ( x i d e a l , y i d e a l ) (x_{ideal}, y_{ideal}) (xideal,yideal):理想无畸变图像中的像素坐标;
* ( x d i s t o r t e d , y d i s t o r t e d ) (x_{distorted}, y_{distorted}) (xdistorted,ydistorted):实际畸变图像中的像素坐标;
* r 2 = x i d e a l 2 + y i d e a l 2 r^2 = x_{ideal}^2 + y_{ideal}^2 r2=xideal2+yideal2(像素点到光心的距离平方);
*
k
1
,
k
2
,
k
3
k_1, k_2, k_3
k1,k2,k3:径向畸变系数(代码中params.k1/k2/k3)。
物理意义:
* k 1 < 0 k_1 < 0 k1<0:桶形畸变(边缘像素被 “拉向” 中心,如鱼眼镜头常见现象);
* k 1 > 0 k_1 > 0 k1>0:枕形畸变(边缘像素被 “推离” 中心,如长焦镜头常见现象);
* k 2 , k 3 k_2, k_3 k2,k3:高阶项,描述更复杂的畸变(鱼眼镜头因视野广,需高阶项修正)。
(2)切向畸变(Tangential Distortion)
由镜头安装误差(如镜片与成像平面不平行)引起,导致像素点沿切线方向偏离。数学表达式为:
x
d
i
s
t
o
r
t
e
d
=
x
i
d
e
a
l
+
2
p
1
x
i
d
e
a
l
y
i
d
e
a
l
+
p
2
(
r
2
+
2
x
i
d
e
a
l
2
)
x_{distorted} = x_{ideal} + 2 p_1 x_{ideal} y_{ideal} + p_2 (r^2 + 2 x_{ideal}^2)
xdistorted=xideal+2p1xidealyideal+p2(r2+2xideal2)
y
d
i
s
t
o
r
t
e
d
=
y
i
d
e
a
l
+
p
1
(
r
2
+
2
y
i
d
e
a
l
2
)
+
2
p
2
x
i
d
e
a
l
y
i
d
e
a
l
y_{distorted} = y_{ideal} + p_1 (r^2 + 2 y_{ideal}^2) + 2 p_2 x_{ideal} y_{ideal}
ydistorted=yideal+p1(r2+2yideal2)+2p2xidealyideal其中
p
1
,
p
2
p_1, p_2
p1,p2为切向畸变系数(代码中params.p1/p2,本例设为 0,假设镜头无安装误差)。
2.3 矫正的数学本质:逆畸变变换
矫正的目标是从畸变图像的坐标 ( x d i s t o r t e d , y d i s t o r t e d ) (x_{distorted}, y_{distorted}) (xdistorted,ydistorted)反推理想坐标 ( x i d e a l , y i d e a l ) (x_{ideal}, y_{ideal}) (xideal,yideal)。这需要求解上述畸变方程的逆过程。
由于径向畸变方程是高次多项式(含 r 2 , r 4 , r 6 r^2, r^4, r^6 r2,r4,r6),无法直接求解析解,因此 OpenCV 采用迭代法近似求解:
-
假设初始理想坐标 ( x 0 , y 0 ) = ( x d i s t o r t e d , y d i s t o r t e d ) (x_0, y_0) = (x_{distorted}, y_{distorted}) (x0,y0)=(xdistorted,ydistorted);
-
代入径向畸变公式计算预测的畸变坐标 ( x p r e d , y p r e d ) (x_{pred}, y_{pred}) (xpred,ypred);
-
比较 ( x p r e d , y p r e d ) (x_{pred}, y_{pred}) (xpred,ypred)与实际畸变坐标 ( x d i s t o r t e d , y d i s t o r t e d ) (x_{distorted}, y_{distorted}) (xdistorted,ydistorted),调整 ( x 0 , y 0 ) (x_0, y_0) (x0,y0)直到误差小于阈值;
-
最终得到理想坐标 ( x i d e a l , y i d e a l ) (x_{ideal}, y_{ideal}) (xideal,yideal)。
2.4 OpenCV 函数的数学映射
代码中通过initUndistortRectifyMap生成的mapx/mapy,本质是存储了每个像素点的逆畸变坐标。具体流程如下:
(1)构建相机内参矩阵 K K K
相机内参矩阵 K K K描述镜头的几何特性,形式为: K = [ f x 0 c x 0 f y c y 0 0 1 ] K = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} K= fx000fy0cxcy1 其中:
* f x , f y f_x, f_y fx,fy:镜头在 x、y 方向的焦距(像素单位,代码中简化为图像宽度 / 高度,实际需标定);
*
c
x
,
c
y
c_x, c_y
cx,cy:光心坐标(图像中心,代码中为w/2.0, h/2.0)。
(2)计算优化的相机矩阵 n e w K newK newK
通过getOptimalNewCameraMatrix函数,根据畸变系数
D
D
D调整
K
K
K,得到新的内参矩阵
n
e
w
K
newK
newK。其核心作用是:
-
平衡有效视野和边缘黑边(通过参数
alpha控制,代码中设为 0,完全裁剪黑边); -
确保矫正后图像的像素坐标在合理范围内。
(3)生成映射表 m a p x / m a p y mapx/mapy mapx/mapy
initUndistortRectifyMap函数的数学本质是:对矫正后图像的每个像素点
(
u
,
v
)
(u, v)
(u,v),计算其在畸变图像中的对应坐标
(
x
d
i
s
t
o
r
t
e
d
,
y
d
i
s
t
o
r
t
e
d
)
(x_{distorted}, y_{distorted})
(xdistorted,ydistorted),并将结果存储在mapx(u 坐标)和mapy(v 坐标)中。
具体步骤:
-
将矫正后图像的像素坐标 ( u , v ) (u, v) (u,v)转换为归一化坐标 ( x , y ) (x, y) (x,y)(通过 n e w K newK newK的逆矩阵): [ x y 1 ] = K − 1 [ u v 1 ] \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = K^{-1} \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} xy1 =K−1 uv1
-
对归一化坐标 ( x , y ) (x, y) (x,y)应用逆畸变变换(迭代求解),得到畸变图像中的归一化坐标 ( x d i s t o r t e d , y d i s t o r t e d ) (x_{distorted}, y_{distorted}) (xdistorted,ydistorted);
-
将 ( x d i s t o r t e d , y d i s t o r t e d ) (x_{distorted}, y_{distorted}) (xdistorted,ydistorted)转换为畸变图像的像素坐标 ( u d i s t o r t e d , v d i s t o r t e d ) (u_{distorted}, v_{distorted}) (udistorted,vdistorted)(通过原内参矩阵 K K K): [ u d i s t o r t e d v d i s t o r t e d 1 ] = K [ x d i s t o r t e d y d i s t o r t e d 1 ] \begin{bmatrix} u_{distorted} \\ v_{distorted} \\ 1 \end{bmatrix} = K \begin{bmatrix} x_{distorted} \\ y_{distorted} \\ 1 \end{bmatrix} udistortedvdistorted1 =K xdistortedydistorted1
(4)调整视野范围(scale 参数)
代码中通过mapx = mapx * params.scale + ...调整映射表,本质是对畸变图像的像素坐标进行缩放。例如,scale=0.77时,映射坐标向中心收缩,减少边缘黑边;scale>1时,映射坐标向边缘扩展,保留更多细节(可能残留畸变)。
三、OpenCV 关键函数解析
1. 图像加载与保存(基础输入输出)
-
imread(input_path)功能:读取鱼眼图像文件(支持 JPG/PNG 等格式),返回一个用于存储像素数据的矩阵对象。注意:需提供正确的文件路径,中文路径可能导致读取失败。 -
imwrite(output_path, result)功能:将矫正后的图像矩阵保存为文件,格式由文件名后缀(如.jpg)自动识别。
2. 相机参数初始化(核心输入参数)
鱼眼镜头的特性通过两组参数描述:
(1)相机内参矩阵(K矩阵)
-
物理意义:描述镜头的固有属性,包括焦距(
f_x/f_y)和光心位置(c_x/c_y)。 -
OpenCV 处理:通过
Mat K = (Mat_<double>(3,3) << ...)构建矩阵,通常假设光心在图像中心,焦距近似为图像宽高(实际需通过标定获取精确值)。
(2)畸变系数矩阵(D矩阵)
-
包含参数:
[k1, k2, p1, p2, k3],前三项为径向畸变系数(描述边缘像素的拉伸 / 收缩程度),后两项为切向畸变系数(描述镜头安装误差导致的偏移,本例中设为 0)。 -
关键作用:告诉 OpenCV “镜头的畸变有多严重”,是矫正计算的核心输入。
3. 优化相机矩阵与有效区域计算(getOptimalNewCameraMatrix)
-
函数功能:根据畸变参数生成一个 “优化版” 相机矩阵(
newK),同时计算矫正后图像的有效区域(validROI)。-
newK:平衡视野范围与边缘黑边,例如通过参数alpha=0可完全裁剪无效区域(黑边)。 -
validROI:记录矫正后图像中有效像素的矩形范围,用于后续裁剪。
-
-
参数意义:输入原相机矩阵
K、畸变系数D和图像尺寸,输出优化矩阵与有效区域。
4. 生成畸变校正映射表(initUndistortRectifyMap)
-
核心价值:这是矫正流程的 “大脑”,计算每个像素在畸变图像中的正确位置,生成两个映射矩阵
mapx(x 坐标映射)和mapy(y 坐标映射)。- 每个像素
(i,j)存储的值是:矫正后图像中该位置的像素,应从畸变图像的哪个坐标获取数据。
- 每个像素
-
技术原理:结合相机内参、畸变系数和优化矩阵,通过逆畸变数学模型(迭代求解高次方程)生成精确的坐标映射关系。
5. 视野范围调整(非必需,按需使用)
通过缩放因子scale对映射表进行调整:
-
scale < 1:向图像中心收缩映射范围,减少边缘黑边(视野缩小)。 -
scale > 1:向边缘扩展映射范围,保留更多细节(可能残留轻微畸变)。
6. 像素重映射(remap函数)
-
核心操作:利用
mapx/mapy中存储的坐标,将畸变图像的像素 “搬运” 到正确位置,生成矫正后的图像矩阵。-
插值方法(如
INTER_LINEAR):通过线性插值计算非整数坐标的像素值,避免锯齿边缘。 -
边界填充:对超出原图像范围的坐标,用黑色(或指定颜色)填充。
-
7. 裁剪有效区域(矩阵切片操作)
直接使用 OpenCV 的矩阵切片功能,根据validROI裁剪掉边缘黑边,得到最终矫正图像,确保输出图像仅包含有效像素区域。
四、矫正流程总览(函数调用顺序)
-
读取图像 →
imread -
准备参数 → 构建
K矩阵与D矩阵(包含畸变系数) -
优化相机模型 →
getOptimalNewCameraMatrix(获取newK与validROI) -
生成映射表 →
initUndistortRectifyMap(核心计算步骤) -
调整视野 → (可选)缩放映射表坐标
-
重排像素 →
remap(核心变换步骤) -
裁剪输出 → 根据
validROI裁剪并保存 →imwrite
五、参数配置与最佳实践
-
畸变系数获取:代码中使用的
k1/k2/k3等参数需通过相机标定获取(使用棋盘格标定板 + OpenCV 标定工具),不可直接使用演示值。 -
视野调整技巧:
-
若边缘黑边过多,尝试减小
scale(如 0.7-0.9)。 -
若边缘细节丢失,适当增大
scale(如 1.1-1.3),但可能引入轻微残留畸变。
- 性能优化:
-
视频流矫正时,提前计算一次映射表(仅需相机参数不变),避免逐帧重复计算。
-
使用 OpenCV 的 GPU 加速模块(CUDA),提升
remap等函数的处理速度。
六、总结:OpenCV 如何简化鱼眼矫正?
通过封装复杂的数学模型(如逆畸变变换、迭代求解),OpenCV 将鱼眼矫正简化为 “参数配置 + 函数调用” 的标准化流程:
-
定义镜头特性(内参 + 畸变系数);
-
生成坐标映射(
initUndistortRectifyMap核心计算); -
重排与裁剪(
remap+ 矩阵切片,完成像素变换)。
即使不深入理解背后的微分几何与数值计算,开发者也能通过合理配置参数,快速实现高质量的鱼眼矫正。实际项目中,准确的相机标定是决定效果的关键 —— 务必使用官方工具获取真实镜头参数,而非依赖默认值。
如果在调试中遇到边缘模糊、黑边异常等问题,可重点检查畸变系数是否正确,或通过调整scale参数平衡视野与边缘效果。有任何具体问题,欢迎在评论区留言讨论!

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









