







引言
在上一节我们已介绍Moravec检测器,它仅仅在8个方向(水平、垂直和四个对角方向)计算灰度变化,为了对其扩展,有必要设计一个可以在任何方向对灰度变化进行测度的函数。1988年,Harris和Stephen通过对Moravec算子进行展开,推导得到了Plessey算子,也即Harris算子。即Harris比Moravec有所提升,因它考虑了角评分(平方差的和)的差分。
基本理论
考察一幅二维有灰度图像f,取出一个图像块


角点不受光圈问题的影响,对于所有

此时,
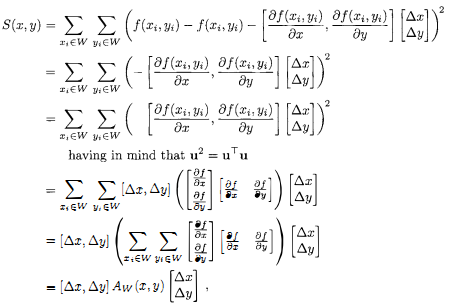
其中Harris矩阵

通常会使用一个各向同性窗,比如高斯窗,其响应也是各向同性的。局部结构矩阵A代表邻域:Harris矩阵A是半正定对称矩阵。其主要变化模式对应于正交方向的偏微分,并由矩阵A的特征值反映出来。在有关文献中建议,通过计算响应函数
算法Harris角点检测
- 1.对图像进行高斯滤波。
- 2.对每个像素,估计其垂直两方向的梯度值。使用近似于导数的核做两次一维卷积即可。
- 3.对于每一个像素和给定的邻域窗口:
- 1)计算局部结构矩阵A
- 2)计算响应函数R(A)
- 4.选取响应函数R(A)的一个阈值,以选择最佳候选角点,并完成非最大化抑制。
Harris角点检测器的优点是对二维平移和旋转,少量光照变化,少量视角变化都不每感,而且其计算其很小。另一方面,当有较大变化,视角变化以及对比鲜明的剧烈变化时,它就失去了原先的不变性。















 1512
1512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









