







说明:以下内容摘录自智车科技公众号文章
通过发射和接收激光束,分析激光遇到目标对象后的折返时间,计算出到目标对象的相对距离,并利用此过程中收集到的目标对象表面大量密集的点的三维坐标、反射率和纹理等信息,快速得到出被测目标的三维模型以及线、面、体等各种相关数据,建立三维点云(Point Cloud)图,绘制出环境地图,以达到环境感知的目的。由于光速非常快,飞行时间可能非常短,因此要求测量设备具备非常高的精度。从效果上来讲,激光雷达维度(线束)越多,测量精度越高,安全性就越高。
相比于可见光、红外线等传统被动成像技术,激光雷达技术具有如下显著特点:一方面,它颠覆传统了二维投影成像模式,可采集目标表面深度信息,得到目标相对完整的空间信息,经数据处理重构目标三维表面,获得更能反映目标几何外形的三维图形,同时还能获取目标表面反射特性、运动速度等丰富的特征信息,为目标探测、识别、跟踪等数据处理提供充分的信息支持、降低算法难度;另一方面,主动激光技术的应用,使得其具有测量分辨率高,抗干扰能力强、抗隐身能力强、穿透能力强和全天候工作的特点。
大多数激光雷达系统主要包括四部分:激光器、光学扫描器,光电检测器,导航系统
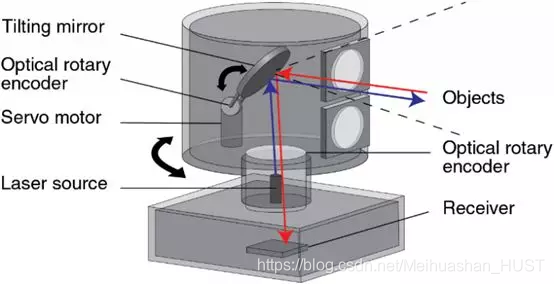
激光雷达成像的速度取决于外部反射的光子经光学扫描部件进入系统的速度。市场上存在许多扫描的方法以改变方位角和仰角,如双振荡平面镜、双轴扫描镜、多面镜等。光学扫描器决定了激光雷达的分辨率和检测范围(角度)[2]。图 3-3 表示 HDL-64E 的光学扫描部件的结构。
光电检测器即读取和记录反射回到激光雷达的信号的设备
当激光雷达安装在移动的平台,如卫星和飞机上时,它需要其它设备的协助以确定设备当前的位置和转向信息,这样才能保证激光雷达测量数据的可用性。GNSS 和 IMU 配合使用,可以将激光雷达测量点由相对坐标系转换为绝对坐标系上的位置点,从而应用于不同的系统中。
线束
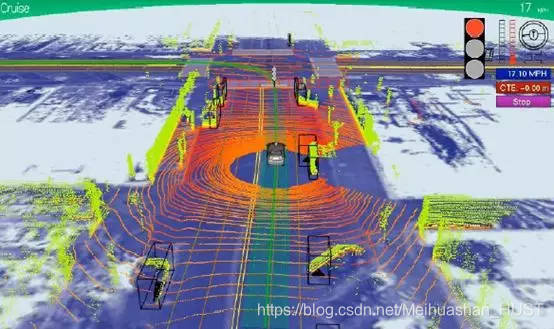
为获得尽量详细的点云图,激光雷达必须要快速采集周围环境的数据。一种方式是提高发射机/接收机的采集速度,每个发射机在每秒内可以发送十万以上组脉冲,也就是说在 1 秒内,有 100,000 组脉冲完成一次发射/返回的循环。复杂的激光雷达有高达 64 组发射机/接收机,组就是线(Channel)的意思,线表示激光雷达系统包含独立的发射机/接收机的数目。多线的配置使得激光雷达在每秒内可构建高达百万的数据点。
光速为3.010^8m/s,照射频率为10 ^6次/s,那么两次照射之间激光跑出的距离为300m,而激光雷达有效测距不超过150m,所以可以认为是一束激光照射反射之后,才发出下一束激光。
方位角
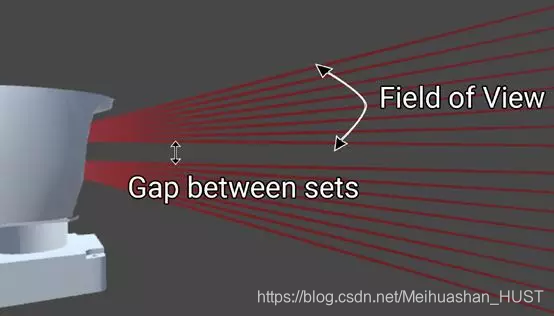
方位角(Field of View, FOV)包括水平方位角和垂直方位角,指的是激光雷达在水平和垂直方向的检测角度。水平角度一般为360度。垂直方位角指的是激光雷达垂直方向的检测角度,一般在 40°以内
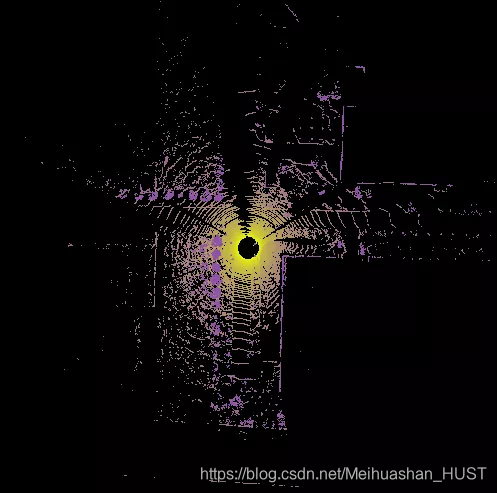
考虑用水平面截上述的激光,可以得到图 3-4 示例多线激光雷达扫描的点云,图中每个同心圆表示一组激光器扫描的点云,表示的地面。对于两组上下相邻的激光器而言,其垂直间隔角为常量(下文“垂直角分辨率”将介绍到)。因此距离越远,扫描的点云同心圆间隔越大。也就是说,距离越远,数据的保真度越低。激光雷达对于近处的物体有更高的分辨率。
扫描帧频
激光雷达点云数据更新的频率。对于混合固态激光雷达来说,也就是旋转镜每秒钟旋转的圈数,单位 Hz 。例如,10 Hz 即旋转镜每秒转 10 圈,同一方位的数据点更新 10 次
角分辨率
角分辨率分为水平角分辨率和垂直角分辨率,表示相邻的两个点的角度。水平角分辨率是指水平方向上扫描线间的最小间隔度数。由于一秒中打出的激光束的频率是固定的,所以它随扫描帧频的变化而变化,转速越快,则水平方向上扫描线的间隔越大,水平角分辨率越大。垂直角分辨率指的是垂直方向上两条扫描线的间隔度数。
测量精度
激光雷达的数据手册中的测量精度(Accuracy)常表示为,例如 ±2 cm 的形式。精度表示设备测量位置与实际位置偏差的范围。
探测距离
激光雷达的最大测量距离。在自动驾驶领域应用的激光雷达的测距范围普遍在100~200 m 左右
数据率
激光雷达每秒钟生成的激光点数,例如:40 线扫描帧频为 20 Hz 的激光雷达,水平角分辨率是 0.45°(每一圈每束激光扫描 800 次)。因此每秒钟生成的激光点数和为:4020800 = 640, 000 points/sec
市场上车载激光雷达种类、型号繁杂,其中 Velodyne HDL-64E 是最受欢迎的激光雷达之一,其所使用的激光是 Category 1 类型,以大约 10 赫兹的频率快速旋转。同时,每个激光脉冲的波长为 905 纳米,平均功率为 2 毫瓦,相当于是标准 10 瓦 LED 大灯泡在近光灯设置下的功率输出的 0.02%。这意味着任何单个激光束将在大约 1 毫秒内扫过眼睛,平均功率小于普通的激光指示器。并且由于每个单独的激光器以不同的方向和角度安装,所以多个激光器不能一次同时直射眼睛并增加功率。即使行人有意盯着 Velodyne 传感器,低功耗和快速旋转的组合情况下也是 Category 1 级,十分安全。
Velodyne HDL-64E型激光雷达参数
激光器个数 Channels 64
扫描距离 Range 100 ~ 120 m
扫描精度 Accuracy ±2 cm
返回数据 Data 距离/强度
数据传输率 Data Rate 1.3M ~ 2.2M points/sec
垂直方位角 Vertical FOV 26.8°
垂直分辨率 Vertical Resolution ~ 0.4°
水平方位角 Horizontal FOV 360°
水平分辨率 Horizontal Resolution
5 Hz: 0.08°
10 Hz: 0.17°
20 Hz: 0.35°
输入电压 Input Voltage 10 ~ 32 VDC
功率 Power 60 W
重量 Weight 15 Kg
尺寸 Size 203284 mm
运行温度 Operating Temperature -10℃ ~ 50℃

激光雷达不能转太快,太快则水平角分辨率不够,当水平分辨率为0.17度的时候,当距离100m时,两个激光点之间的距离就到了14cm。不能转太慢,太慢则对目标运动的采样太稀疏。一般的处理方法有,将360度投射到一个柱面上,形成64N的图像,但是这些图像的像素点并不是同一时刻的,第一个个最后一个可能差0.1s。也可以投影为俯视图。同时可以发现每个激光点还记录了激光束的编号,这也是一个重要的特征。
采用Cepton 微动技术(MMT)的创新方法制造出的成像激光雷达,其价格不会超过普相机的价格。
固态激光雷达没有运动的部件,是最好的方法
没有运动部件的固态激光雷达只改进了激光结构的一个方面。无磨损的结构增强了激光雷达的可靠性。然而,无磨损的机构,也会使得激光雷达性能大打折扣。最能够说明问题的表现就是激光雷达的测量距离减小,视场角缩小,或者对环境光源(如阳光)更敏感。此外,固态激光雷达的高成本也成为了阻碍其在消费者市场大规模部署的因素。
激光雷达最突出的特点是在测量三维物体时也有较高空间分辨率。雷达可以检测到停在前方的汽车,但无法判断该车是停在前方还是侧方。在没有足够环境照明的情况下,摄像头也将变得毫无用处。
在 Velodyne 推出 VLS-128 之前,整体车载激光雷达市场上的趋势都是往低线束化、固态化发展,也就是往减少激光雷达线束发展,同时也从机械型转为固态型,因为这样做可以降低成本,但是需要用数量来弥补线数的不足,也体现出未来的技术路线未定,产业龙头 Velodyne LiDAR 也不能确定到底是多线束激光雷达还是多激光雷达耦合。
从以上对国外车载激光雷达技术现状的分析中能够得到的统一趋势有低成本化、固态化、量产化,但是 Velodyne LiDAR 推出更高线束的激光雷达和其他科技厂商推出低线束激光雷达的行为并不矛盾,他们的整体方向依然是要实现激光雷达的更高分辨率和精准度,进一步保证无人驾驶的安全性,只不过前者倾向于使用更强大的设备,后者倾向于使用多激光雷达耦合并降低成本。同时,低线束激光雷达对高线束激光雷达可以起到补充的作用。
但是摄像头同时具有三个缺点:缺点一是逆光或光影复杂的地方难以使用;缺点二在于依赖于算法,能否辨别物体完全依赖样本的训练,样本未覆盖的物体将无法辨别,比如 Mobileye 在中国道路上应用,识别超载运货车的成功率不超过 80%;缺点三在于摄像头对于行人的识别具有不稳定性,因为行人不同于车辆,动作、服装、身体各部分变化要素很多,而且还要与街上的建筑、汽车、树木等背景图案区分开来,比如 Mobileye 在日本、德国、美国、以色列等国市区的测试结果显示,行人的成功检测率为 93.5%,距离实现完全无人驾驶还有很大差距,再如穿着吉祥物套装或着装颜色与背景相似的人或搬运东西的人极有可能无法识别。因此,摄像头的物体识别功能无可比拟,但由于依赖样本识别物体,以及识别行人具有不稳定性,摄像头应用于测距领域无法保障 100% 的稳定性,在自动驾驶领域脱离激光雷达使用只能应用于 ADAS 而不能应用于完全的无人驾驶。
发射 1~10 毫米的电磁波,根据反射波的时间差及强度等来测量距离,汽车毫米波雷达的频段主要在 24 GHz 和 77 GHz。其优点在于性价比较高,探测距离远,精度较高,穿透雾、灰尘的能力强,能够全天候全天时工作,在很多高档轿车里都有应用;缺点是行人的反射波容易被其他物体反射波埋没,难以分辨,无法识别行人,例如采用毫米波雷达和摄像头的感知系统实现自动驾驶的 Tesla,在行人较多的闹市区会自动锁定自动驾驶功能。因此,毫米波雷达在测距领域具有较高性价比,但是其无法探测行人是一个致命弱点,只能应用于自适应巡航系统等 ADAS 系统。目前毫米波雷达市场由国外厂商垄断,国内主要的零部件供应商正在致力于车载毫米波雷达的国产化。79 GHz 毫米波雷达作为未来发展趋势,能更有效地发挥自动驾驶传感器所需的性能。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









