










一键式机载激光雷达点云地形关键点提取,不是梦
一、背景
人们普遍认为,广袤的现实地理空间和地理现象不可能也没必要在地图图纸或GIS的工作空间中完全表达,只能表达到一定的最小单位和控制在一定的误差范围内,并由分辨率和精度来描述。因此,已有的任何形式的地理信息产品,无论是纸质的还是数字的,都是对地理现象的抽象化之后的模型化表达。
数字高程模型(DEM)是国家空间数据基础设施(NSDI)的必要组成部分之一。通常,DEM指规则格网模型。目前,人们普遍利用地面测量、现有地图数字化、数字摄影测量方法获取DEM。近些年来随着科学技术的迅速发展,在DEM数据的获取方法方面又取得了一些突破性进展,其中机载LiDAR技术是其突出的代表之一。许多研究人员认为,使用机载LiDAR系统采集地形数据生成DEM是最高效的方法,并且正在逐渐成为一种空间科学领域DEM生产行业的实行标准。机载LiDAR能较好地满足和实现人们对地形测量的需求,已经被广泛地应用于生产高精度、高分辨率的DEM,这些产品被用于各种线路选线(铁路、公路、输电线)的设计以及各种工程的面积、体积、坡度计算。
柯正谊等(1993)按空间结构形式将数字地形模型(DTM)分为七类:规则格网点、散点、等高线、曲面、线路、平面多边形和空间多边形。其中等高线、规则格网DEM和基于TIN表面模型等三种模型在实际应用中最为广泛。这七类DTM都是以向量序列本身及它们之间的全部关系表示地面高程的几何模型,是一种地面的数字抽象。对地面的抽象和表达能力是衡量一个地面模型好坏的标准之一。权威专家认为,“要求一个科学的、能表明区域地形的数字模型,称得起模型的数字表达。这里很重要的就是对模型(Model)的理解。模型不是性质全集的罗列,也不是个别或少许特性的枚举。模型是一种抽象,是本质特性、全局特性、内部联系特性的表达。是要通过去粗取精,去伪存真,由此及彼,由表及里的改造制作工夫才能完成的”。科学的抽象即是综合。
机载LiDAR能够获取大区域、密集的激光脚点数据,但这些海量数据的存储、传输及可视化为LiDAR数据在DEM和等高线生成及数字孪生中潜在的应用提出了挑战。为此,我们一直在探索如何从点云数据中提取关键点,并利用关键点来进行等高线绘制、高程点提取、地形图成图。
二、相关方法原理
一般地,在数据采集的过程中,采样点数量越多,则插值出的地形表面也就越接近真实的模型。获取的模型的精度会随着采样点数量和密度的增加而提高。最终,达到一个收益递减的临界点,超过了这个临界点,即使有更多的点加入也不能继续地改善输出的模型的质量,反而增加了计算时间和数据容量。同时,在冗余数据采集区内的点群可能会产生奇异的表面,从而导致获取的模型精度的降低。换句话说,有更多的数据点并不一定总是提高模型的精度。通常认为机载LiDAR的数据用于高分辨率的DEM建模时,已经足够了;LiDAR数据集可以在数据大幅化简的情况下仍然保持高程模型的足够精度。
LiDAR数据化简的主要目的是要在采样密度和数据量之间找到一个最优的平衡点。理论上,高质量的DEMs可以由高密度的激光脚点得到。然而,由于在LiDAR数据的采集过程中,采集的激光脚点的密度无法与地形类型信息完全匹配,某些过采样是无法避免的。因为LiDAR系统无法区分哪些地区是我们需要的重要地形点,所以在一些地形很简单的平坦地区,激光脚点的密度已经远远超过了实际所需,导致LiDAR数据的存储和处理时间也大大增加了。因此,在不损失地形数据精度的前提下,需要解决LiDAR数据大数据量的问题。通过数据化简(如信息量与数据集大小的比例),可以得到一个适当大小的便于管理和操作的地形数据集来生成DEM。基于数据化简对生成DEMs及地形特征点精度的影响的分析,出现了地形数据化简的研究。
为了解决上述问题,研究人员开展了机载LiDAR数据化简的相关研究。以下是LiDAR数据化简的一些代表性研究成果。
Pradhan等(2005)提出利用TIN和小波变换进行机载LiDAR数据化简的方法,如图1所示。首先利用不规则三角网组织LiDAR数据,然后基于第二代小波变换对不规则三角网进行分裂和提升迭代运算,直到达到设置的化简比率,从而实现LiDAR数据化简。但由于TIN结构复杂、运算代价大,使得算法的时间复杂度很高,同时该方法也无法在化简过程确定合理阈值来保留重要的点、剔除不重要的点。



图1 从上到下三组图像依次是原始数据(5000点),压缩了12%的TIN渲染效果图和不规则三角网,压缩了23%的TIN渲染效果图和不规则三角网(Pradhan et al.,2005)
国内学者徐景中(2008)提出了基于点云离散度的化简方法。算法借用离散度的概念,有效地描述了点云间高程差异与地形起伏的关系,如图2所示。点的离散度反映了该点对该区域地形起伏的贡献程度,即点的离散度越大,说明该点对该区域地形起伏的贡献越大。具体的算法流程是,首先确定化简比率,从而得到高程阈值和最小距离阈值;将激光脚点进行二维格网划分,将给定格网中的所有点按高程值进行排序,若格网中点的高程最大最小值之差大于高差阈值,则作为地形特征点保留,区域中的其他点则根据其离散度大小进行取舍;接着根据当前网格的索引号搜索邻近区域,进行候选特征点的“非极值抑制”处理,即对邻域格网中与当前候选特征点距离接近而且高程小于阈值的点作删除标记。
 (a) 原始数据图 (b) 1:500比例化简图 (c) 1:2000比例化简图
(a) 原始数据图 (b) 1:500比例化简图 (c) 1:2000比例化简图
图2 基于点云离散度的化简(徐景中,2008)
三、“点云智绘”中地形关键点提取的解决方案
“点云智绘”软件3.0版本中,创造性的提出了基于地形特征点与高程点相结合的地形关键点提取方案,如图3所示。
其中,“地形特征点”分为3类。一类是山脊极值点,它们是那些在山脊区域取得局部极大值的点,包括山峰点和山脊线或结构线上的点。一类是山谷极值点,指那些在山谷区域取得局部极小值的点,包括洼地点和山谷线或结构线上的点。一类是地物的坡度变换线(称为坡折线)和棱线(坡向变换线)。被选取的“地形特征点”中,地形特征点,如山峰点、山洼点,和地形结构线上或附近的点,如山脊点、山谷点等,无疑是其最主要组成部分。
 (a)一键式地形关键点提取的位置
(a)一键式地形关键点提取的位置

(b)一键式地形关键点提取界面

(c)一键式地形关键点提取界面一
图3 “点云智绘”软件3.0版本中的一键式地形关键点提取
CAD软件的作业流程进行无缝衔接。其中,csv格式的关键点文件内容如图4所示。

图4 csv格式的关键点文件内容展示
四、案例
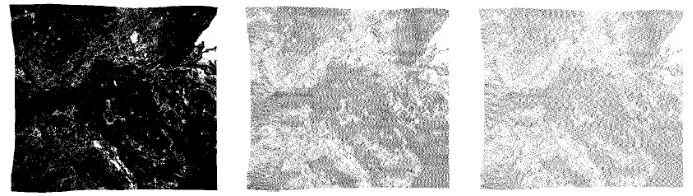
该点云数据对应的区域位于青藏铁路班戈大桥附近,班戈大桥位于西藏自治区那曲市班戈县。该点云数据由长春成达数码测绘有限公司提供。只包含地面点类别的数据,包含8002610个点,如图5(a)所示。使用“点云智绘”软件3.0版本中的“一键式地形关键点提取”工具进行处理,共获取了188790个地形关键点,如图5(b、c、d)所示。提取的地形关键点数量仅占原数据点数的2.36%。
长春成达数码测绘有限公司相关人员将该地形关键点与已成的地形图套和后发现,这些地形关键点不仅真实反应了测区的地形、地貌,有利于高精度等高线的生成,并且反应了测区内的陡坎、道路边缘、护坡坡度变换线,为地形图的完善奠定了良好的基础。“点云智绘”软件3.0版本 “一键式地形关键点提取”工具具有将稠密的机载激光雷达点云变为工程测量所需的地形关键点的能力。
 (a)原始点云数据
(a)原始点云数据

(b)局部地形关键点展示
 (c)局部地形关键点展示
(c)局部地形关键点展示
 (d)局部地形关键点展示
(d)局部地形关键点展示
图5 青藏铁路班戈大桥附近的机载LiDAR点云(地面点)及其地形关键点提取结果















 219
219











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









