







需求是这样的:
比如飞机机头挂者一个摄像头,那么该摄像头自然会随飞机上下左右移动。但一般摄像头会先固定于一个挂架上,挂架内装有陀螺仪,可以稳定姿态。
即当飞机机头方向改变后,摄像头不会马上跟随飞机移动,而是慢慢跟随飞机移动,具有一定的自稳定性。如果机头摆动幅度很大,则会很快跟随,如果机头在一个位置左右小幅度摆动,则摄像头挂架能自己消除这种抖动。
现在任务就是用一段简单的代码来近似模拟这种情况。
基本的思路是这样:摄像头固定于挂架上,方向随挂架方向改变,摄像头本身也可以上下左右改变方向。挂架固定于机头,机头方向改变后,挂架向机头方向运动,运动速度与挂架与机头之间的夹角相关。夹角越大,速度越快。
代码如下:
/************************************************************************
** 时 间: 2014年12月19日 13:28
** 文件名: SightTools.h
** 创建人: limenghua
** 邮 箱: 576566385@qq.com
** 主要功能: 观瞄具抽象基类
*************************************************************************/
#ifndef SightTools_h__
#define SightTools_h__
namespace gyj{
namespace attack{
inline float ClampValue(float value,float min,float max)
{
return value < min ? min : (value > max ? max : value);
}
class SightTool{
public:
SightTool():
_heading(0),_pitch(0),
_maxHeading(360),_minHeading(-360),
_maxPitch(180),_minPitch(-180)
{
}
SightTool(float minHeading,float maxHeading,float minPitch,float maxPitch):
_heading(0),_pitch(0),
_minHeading(minHeading),_maxHeading(maxHeading),
_minPitch(minPitch),_maxPitch(maxPitch)
{
}
float Heading()
{
return _heading;
}
void Heading(float value)
{
_heading = ClampValue(value,_minHeading,_maxHeading);
}
float Pitch()
{
return _pitch;
}
void Pitch(float value)
{
_pitch = ClampValue(value,_minPitch,_maxPitch);
}
private:
float _heading;
float _pitch;
float _maxHeading;
float _minHeading;
float _maxPitch;
float _minPitch;
};
}
}
#endif // SightTools_h__
/************************************************************************
** 时 间: 2014年12月19日 14:06
** 文件名: MFDSightTools.h
** 创建人: limenghua
** 邮 箱: 576566385@qq.com
** 主要功能: MFD瞄准具,增加自稳定算法,需要定期调用其Update
*************************************************************************/
#ifndef MFDSightTools_h__
#define MFDSightTools_h__
#include "SightTools.h"
namespace gyj{
namespace attack{
const float MIN_MFD_SIGHT_HEADING = -120;
const float MAX_MFD_SIGHT_HEADING = 120;
const float MIN_MFD_SIGHT_PITCH = -60;
const float MAX_MFD_SIGHT_PITCH = 30;
const double FRAME_PER_SECOND = 60.0;
const double VERY_SMALL_NUMBER = 0.0001;
const double DISTANCE_QUOTIETY = 1;
//自稳定算法1
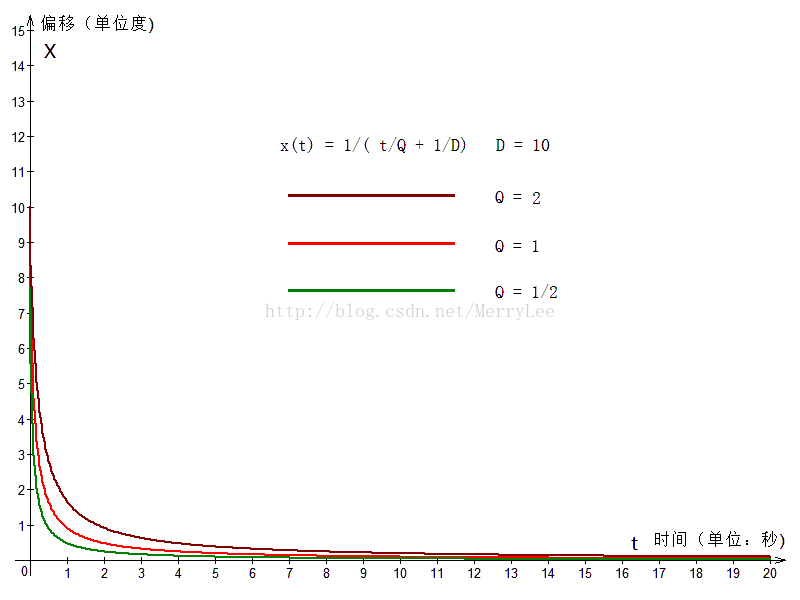
//取 x(t) = 1/( t + 1/D) D > 0
// x(t) = 1/(1/D - t) D < 0
// x(t) = 0 (D = 0)
// 取值范围,t(0,正无穷),x(D,0)
// 函数图像可以参考VelocityFunction.bmp
//可以根据需要替换为其他算法
inline double VelocityFunction(double deviation,double secondsElapsedFromLastUpdate)
{
double x = 0;
double t = secondsElapsedFromLastUpdate / DISTANCE_QUOTIETY;
double D = deviation;
if(deviation > VERY_SMALL_NUMBER)
{
x = 1/( t + 1/D) ;
}
else if(deviation < -VERY_SMALL_NUMBER)
{
x = 1/(1/D - t);
}
else {
x =0;
}
return x;
}
class MFDSightTool:public SightTool
{
public:
MFDSightTool():
SightTool(MIN_MFD_SIGHT_HEADING,MAX_MFD_SIGHT_HEADING,
MIN_MFD_SIGHT_PITCH,MAX_MFD_SIGHT_PITCH),
_holderHeading(0),_holderPitch(0),
_planeHeading(0),_planePitch(0)
{
}
template<class Function>
void Update(double secondsElapsedFromLastUpdate,Function f)
{
double deviation = _holderHeading - _planeHeading;
deviation = f(deviation,secondsElapsedFromLastUpdate);
_holderHeading = _planeHeading + deviation;
deviation = _holderPitch - _planePitch;
deviation = f(deviation,secondsElapsedFromLastUpdate);
_holderPitch = _planePitch + deviation;
}
void Update(double secondsElapsedFromLastUpdate = 1/FRAME_PER_SECOND)
{
Update(secondsElapsedFromLastUpdate,VelocityFunction);
}
double ActureHeading()
{
return Heading() + _holderHeading - _planeHeading;
}
double ActurePitch()
{
return Pitch() + _holderPitch - _planePitch;
}
void PlaneHeading(double value)
{
_planeHeading = value;
}
void PlanePitch(double value)
{
_planePitch = value;
}
private:
double _planePitch;
double _planeHeading;
double _holderPitch;
double _holderHeading;
};
} //namespace gyj
} //namespace atack
#endif // MFDSightTools_h__














 1751
1751











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









