







The current state of autonomous suturing: a systematic review
Authors: Benjamin T. Ostrander ·Daniel Massillon ·Leo Meller ·Zih‑Yun Chiu ·Michael Yip ·Ryan K. Orosco
Source: Surgical Endoscopy
Keywords: Autonomous surgery · Suturing · Autonomous suturing · Robotic surgery · Surgical innovation · Robotics

Abstract
背景:机器人技术是手术创新的重要工具,机器人在临床环境中的使用越来越多。机器人可以用来提高准确性,执行远程操作,或者自动化任务。其中一个手术任务就是缝合,这是手术的基本组成部分,但却是重复性的,耗时的。由于缝合的普遍性、重复性和明确定义的限制,它成为了一个有前景的自动化目标。本篇综述研究了关于自动化缝合的研究进展。
方法:按照PRISMA指南对自动化缝合的文献进行了系统评价。
结果:通过搜索PubMed、Embase、Compendex和Inspec,找到了6850篇文章。排除了重复的和非英文的文章。筛选了4389篇文章并排除了4305篇。剩下的84篇中,43篇不符合标准,最后留下41篇供最终审查。其中,34篇(81%)是在2014年后发布的。31篇(76%)是在工程期刊上发布的,9篇在机器人期刊上,1篇在医学期刊上。大多数的文章(33篇,80%)没有特定的临床专业重点,而6篇(15%)专注于微创/腹腔镜手术的应用,2篇(5%)专注于眼科应用。识别出了几个缝合子任务,包括打结、缝合线穿过/针插入、针线传递、针线和缝合线抓取、针线跟踪/知觉、缝合线检测、缝合针形状制作、器械分配和缝合精度。有14篇文章被认为是多组分的,因为它们提到了几个前面提到的子任务。
结论:在这篇对自动化缝合研究进展的系统评价中,41篇文章显示出机器人缝合有了显著的进步。这个总结揭示了工作的显著的异质性,作者们关注缝合的不同方面和许多工程问题。该评审展示了手术自动化在学术和商业上的日益增长的兴趣,以及在可行性方面的显著技术进步。
机器人技术自 20 世纪 80 年代末以来就被用于临床手术。手术中机器人的使用可以提高术中任务的准确性,特别是重复或精细的任务,并有可能改善患者的手术结果。此外,机器人可以使手术程序更有效或更易执行。它们可以减少颤抖,改善可视化,并访问困难或以前无法访问的解剖结构。机器人可以实现新的或微创手术程序。机器人技术还提供了自动化任务或执行远程遥控手术的潜力。
可编程通用操作臂 (PUMA) 是医学中使用的第一个机器人。这个机器人臂有六个自由度,用于在计算机断层扫描 (CT) 引导下定位用于脑活检的针头。与人手相比,PUMA 560 提供了更准确、更稳定的引导,为以后的手术机器人铺平了道路。随着机器人技术的迅速进步,手术中机器人技术的使用也得到了发展,包括在开放和腹腔镜手术中对软组织和骨组织的操作。
缝合是一种重复的基础外科手术操作,可能很乏味且耗时,在微创手术中尤其如此。缝合的主要目的是将组织连接在一起,同时减少潜在的缺血、组织损伤和过度的紧张,以优化伤口愈合 [7-9]。缝合是自动化的一个很有前景的对象,因为它普遍存在、重复性强且限制因素明确。随着机器人技术和自动化技术的迅速发展,人工智能实现自主缝合的可能性已经得到了探索。阿塔纳西奥等人描述了手术机器人中行为类型之间的差异,并确定了 4 种自主水平,包括无自主性 (L1)、机器人辅助 (L2)、条件自主性 (L3) 和高度自主性 (L4)。在临床实践中,机器人系统目前仅实现了第二级自主。机器人设计和计算技术的进步促使人们研究和开发能够实现三级自主的机器人。
在此,通过系统性回顾实验、理论案例和自主缝合任务优化,全面总结了现有探索自主缝合的研究。这是关于自主缝合相关研究的第一篇系统性文献回顾。
材料和方法

按照优选报告项目系统评价和荟萃分析(PRISMA)指南进行了系统评价,以评估自主缝合的当前状态。在2022年12月12日查询了PubMed、Embase、Compendex和Inspec(通过Engineering Village)的文献,采用了以下搜索策略,该策略是在机构图书馆员的帮助下制定的。
选择文章的包含标准如下:(1) 原始研究专注于实验、方法和自主缝合的优化。 (2) 2000年1月1日或以后的出版物。 (3) 描述或研究的缝合方法必须完全自主,需要操作员控制最少,或者旨在实现完全自主控制。包括那些需要操作员进行最少甚至不需要干预就能完成缝合任务的设备。这些包含标准过滤了那些属于Attanasio等人定义的Level 3自主性的文章,即机器人具有“设计执行特定任务的策略的能力”以及“从系统可用的信息中独立提取计划特定任务所需参数的能力”。
使用了以下排除标准:(1) 主要正文为非英语的文章。 (2) 摘要或全文不可用。 (3) 完全由操作员或由操作员完全控制机器人的缝合不被视为“自主”。 (4) 仅用于装订或促进缝合固定或结扎的设备被排除。
对文章标题和摘要进行了筛选,以确定其是否符合包含标准。对于符合资格的文章,审查了全文手稿。当遇到重复的文章时,将文章合并,或者如果无法合并,根据出版日期、元数据和全文的可用性选择最佳版本。两位作者在每个阶段独立审查每篇文章并进行数据提取。
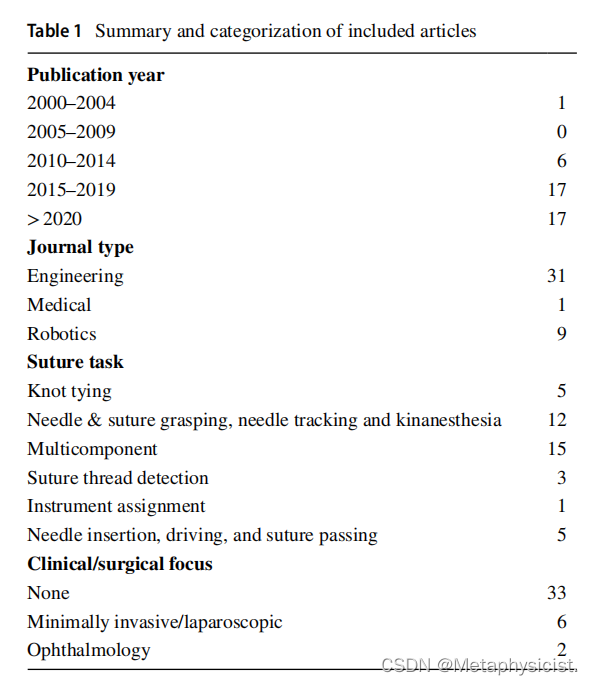
表1所纳入文章的汇总和分类
结果
通过搜索 PubMed、Embase、Compendex 和 Inspec,共找出 6850 篇文章。在筛选之前,删除了 592 篇非英文文章。另有 1869 篇文章被确定为重复项。共筛选了 4389 篇文章,其中 4305 篇被排除在外。在剩下的 84 篇文章中,有 13 篇无法获取。对剩余的 71 篇文章进行了符合性评估。其中,又有 18 篇被发现没有描述完全自主的机制,9 篇没有描述缝合装置,3 篇被确定为重复项,最终留下 41 篇文章进行审查。PRISMA 搜索策略的详细信息如图 1 所示。表 3 提供了满足纳入标准的所有 41 篇文章的摘要。
所审查文章的描述
在最终纳入的文章中,34 篇(81%)发表于 2014 年之后。31 篇文章(76%)发表在工程学研究期刊上。9 篇发表在机器人研究期刊上,1 篇发表在医学研究期刊上。绝大多数文章(33 篇,80%)没有具体的临床专科重点,而有 6 篇(15%)的重点是微创手术/腹腔镜手术中的应用,2 篇(5%)的重点是眼科手术中的应用。我们确定了几个缝合子任务,包括打结、缝线传递/针插入、针传递、针和缝线抓取、针跟踪/运动感知、缝线检测、缝针形状制作、器械分配和缝合准确性。14 篇文章被认为是多组分的,因为它们涉及了上述的多个子任务。根据缝合子任务对文章进行分类的摘要如表 1 所示。
打结
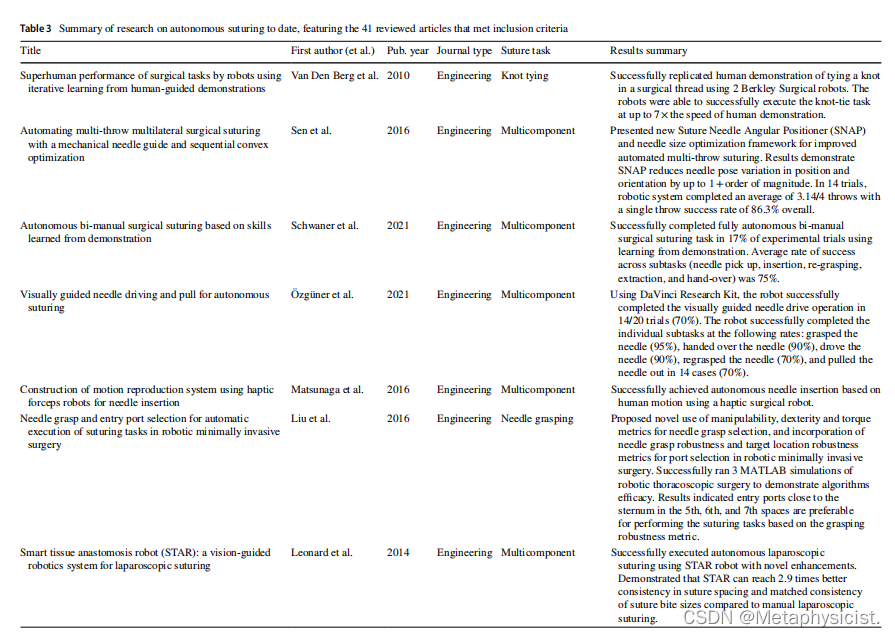
打结是缝合的一个重要方面,因为形成和固定结节是将组织连接在一起的首要要求。2002 年,Kang 等人提出了一个框架来评估机器人缝合打结时的张力,使用了一个力/扭矩传感器。实验证明,一个带有主动阻尼的显式力控制算法可以实现缝合张力调节 [11]。2010 年,Van Den Berg 等人使用 2 个伯克利手术机器人成功地复制了人类使用外科缝线打结的过程。他们使用“一种学徒学习方法,这种方法有可能使机器人手术助手能够自主执行特定的轨迹,在速度和光滑度方面表现出超人的表现”,他们通过教机器人以人类引导的后驱动缝合动作来实现这一点。与人类相比,机器人以高达 7 倍的速度成功地完成了打结任务。Chow 等人证明了一个自动化机器人系统能够打一个两折的外科结,耗时 337 秒:其中 80% 的时间归因于图像处理,估计的打结任务耗时 70 秒,远程遥控操作耗时 71 秒。
2012 年,Knoll 等人提出了一种新的“脚手架学习”方法来完成人类与机器之间的手术打结技能转移。他们报告说,这种方法成功地将手动演示转换为原语,供四臂机器人设置在缝合环境的不同点完成打结任务。
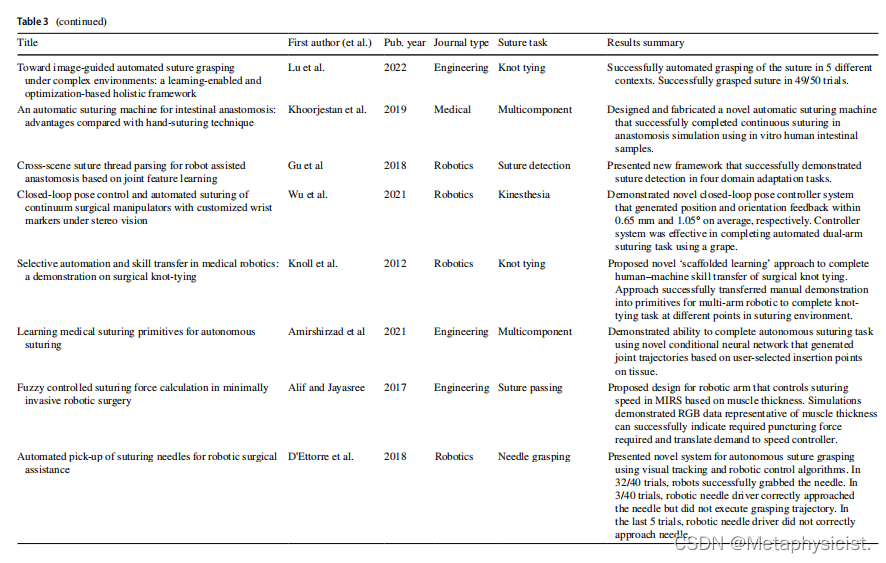
2022 年,Lu 等人报告了使用 da Vinci 研究套件 (dVRK) 在 5 种不同的背景下成功自动抓取缝线的结果:3 种缝合模拟、1 种腹腔镜模拟和 1 种猪组织。在 50 次试验中,有 49 次成功抓取缝线,在 50 次试验中有 37 次总误差小于 10 毫米。
针和缝线抓取、针跟踪和运动感知
针抓取是缝合这一复杂任务中的第一个子组件步骤,它需要识别针的位置和方位,并使用适当的抓取技术来保存针并将其放置在正确的方向。Jackson 等人报告说,与全控针驱动相比,非全控针驱动在结直肠内窥镜检查中使用优化的针路径计划时,可以到达更理想的组织深度,同时减少总力。2015 年,Liu 等人提出了一种用于机器人腹腔镜手术中最佳针抓取的算法,成功地选择了针抓取姿势,以最大限度地提高手术系统的操作性和灵活性。
表2四种最常见的缝合任务类别的研究总结
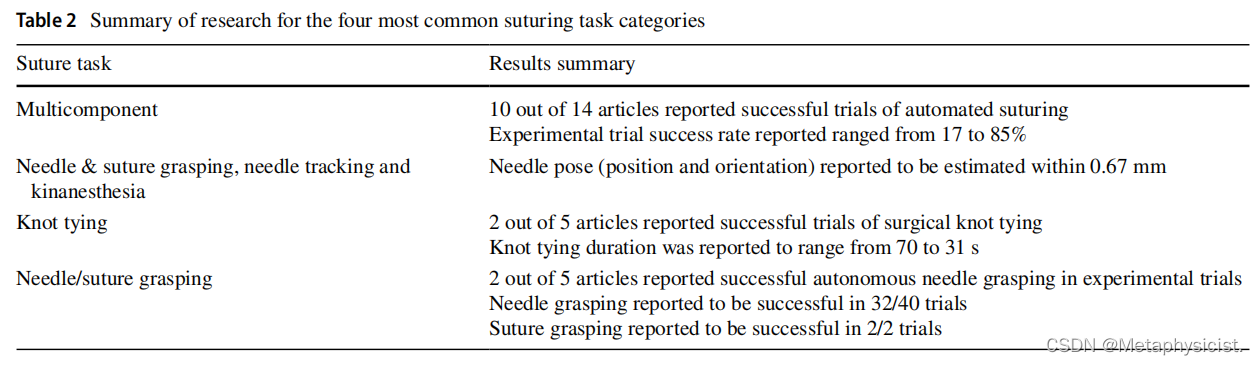
表3迄今为止的自主缝合研究总结,包括41篇符合纳入标准的综述文章


这篇系统回顾总结了自2000年以来关于自主缝合技术的研究,这是手术中常见且重要但重复性高的任务。随着机器人技术、人工智能和计算机视觉的发展,手术自动化领域的兴趣日益增加,尤其体现在像da Vinci系统这样的机器人手术辅助中。
尽管机器人辅助手术在减少手术时间、提升技艺和可能降低成本方面有一定贡献,但它们还不能完全替代人类手术师,因为手术环境的复杂性和患者个体差异是个挑战。研究主要集中在开发新型生物兼容的机器人工具、用于复杂环境的视觉识别模型、优化的运动规划算法和集成的传感器技术上,以提高精确度、稳定性和安全性。
然而,实现完全自主手术的机器人仍面临实际难题,如成本效益、法规批准和临床流程的整合。尽管如此,部分自动化,如提供反馈和辅助,已经接近并显示出其在提高效率和安全性方面的潜力。
总的来说,自主缝合技术的研究在不断进步,但仍需克服许多技术、经济和实践上的挑战。随着机器人技术的持续发展和人工智能的进步,我们期待未来在手术自动化方面有更多突破。
Reference
[1] Ostrander, B. T., Massillon, D., Meller, L., Chiu, Z. Y., Yip, M., & Orosco, R. K. (2024). The current state of autonomous suturing: a systematic review. Surgical endoscopy.















 493
493











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











