



 本文介绍了一种基于卡尔曼滤波器的实现方法,详细解释了卡尔曼增益、估计协方差、测量协方差及估计值等关键概念,并提供了具体的初始化过程和滤波算法流程。
本文介绍了一种基于卡尔曼滤波器的实现方法,详细解释了卡尔曼增益、估计协方差、测量协方差及估计值等关键概念,并提供了具体的初始化过程和滤波算法流程。


#ifndef _KALMAN_H_#define _KALMAN_H_
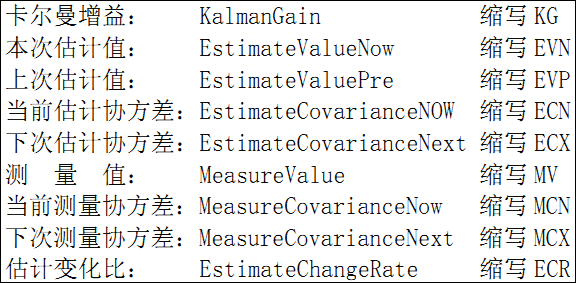
extern KalmanGain;// 卡尔曼增益
extern EstimateCovariance;//估计协方差
extern MeasureCovariance;//测量协方差
extern EstimateValue;//估计值
extern void KalmanFilterInit(void);
extern KalmanFilter( Measure);
#endif
#include "config.h"
#include "math.h"
KalmanGain;// 卡尔曼增益
EstimateCovariance;//估计协方差
MeasureCovariance;//测量协方差
EstimateValue;//估计值
void KalmanFilterInit(void);
extern float KalmanFilter(float Measure);
void KalmanFilterInit(void)
{
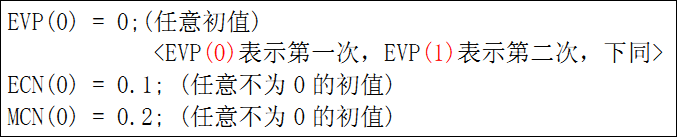
EstimateValue=0;
EstimateCovariance=0.1;
MeasureCovariance=0.02;
}
KalmanFilter( Measure)
{
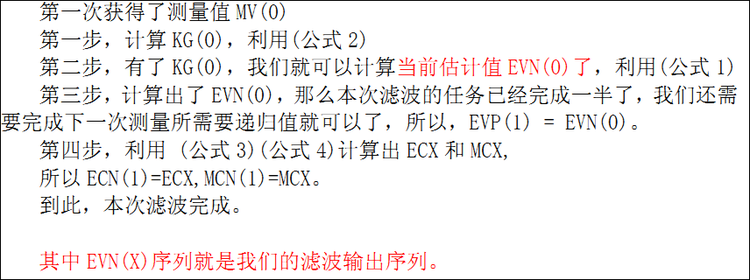
//计算卡尔曼增益
KalmanGain=EstimateCovariance*sqrt(1/(EstimateCovariance*EstimateCovariance+MeasureCovariance*MeasureCovariance));
//计算本次滤波估计值
EstimateValue=EstimateValue+KalmanGain*(Measure-EstimateValue);
//更新估计协方差
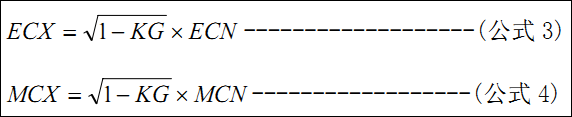
EstimateCovariance=sqrt(1-KalmanGain)*EstimateCovariance;
//更新测量方差
MeasureCovariance=sqrt(1-KalmanGain)*MeasureCovariance;
//返回估计值
return EstimateValue;
}
















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









