






 本文提出了一种改进的A*算法用于解决传统路径规划中的障碍物碰撞和死角问题,通过二维栅格地图和MATLAB仿真验证,有效提升路径规划的安全性和效率。
本文提出了一种改进的A*算法用于解决传统路径规划中的障碍物碰撞和死角问题,通过二维栅格地图和MATLAB仿真验证,有效提升路径规划的安全性和效率。
基于A*算法的往返式全覆盖路径规划的改进算法
matlab实现代码
算法一
%%往返式全覆盖路径规划
%通过建立二维栅格地图,设置障碍物,以及起始点
%根据定义往返式路径规划的定义的优先级运动规则从起始点开始进行全图遍历,
%利用A星算法逃离死角位置,避开障碍物寻找最近的未覆盖节点,继续进行全图覆盖,最后绘制全覆盖路径
算法二
Astart逃离死角位置,躲避障碍物
%由于传统往返式全覆盖路径规划算法容易与障碍物碰撞或进入死角位置,这里利用A星算法逃离死角位置,保证全图路径规划顺利进行
本算法主要通过MATLAB建立二维栅格地图进行仿真验证
ID:17100771158636211
那年花开

基于A*算法的往返式全覆盖路径规划的改进算法
摘要:路径规划在无人机、机器人等领域有着广泛应用。本文提出了一种基于A算法的改进往返式全覆盖路径规划算法,旨在解决传统算法容易与障碍物碰撞或进入死角的问题。通过建立二维栅格地图,设置障碍物和起始点,结合A算法的优势,实现全图覆盖,并利用MATLAB进行仿真验证。该算法能够高效地规划无人机或机器人的路径,保证其安全、稳定地完成任务。
-
引言
路径规划是自动化领域中的重要研究方向,针对无人机或机器人的全覆盖任务具有重要意义。在传统往返式全覆盖路径规划算法中,存在与障碍物碰撞或进入死角的风险。为了解决这一问题,本文提出基于A*算法的改进算法,通过逃离死角位置和避开障碍物,实现安全高效的全图路径规划。 -
算法原理
2.1 往返式全覆盖路径规划
往返式全覆盖路径规划是指在全图中,从起始点出发,按照特定路径规则遍历全图,保证覆盖每个节点,并返回起始点。在传统算法中,只考虑节点的覆盖,而忽略了与障碍物的碰撞风险。本文算法通过建立二维栅格地图,将障碍物设置在地图中,以及设定起始点,实现往返式全覆盖路径规划。
2.2 A算法
A算法是一种常用的启发式搜索算法,主要用于计算启发式函数最小的路径。本文算法利用A算法逃离死角位置,避开障碍物,找到最近的未覆盖节点,并继续进行全图覆盖。通过引入A算法,改进往返式全覆盖路径规划的效率和安全性。
-
算法实现
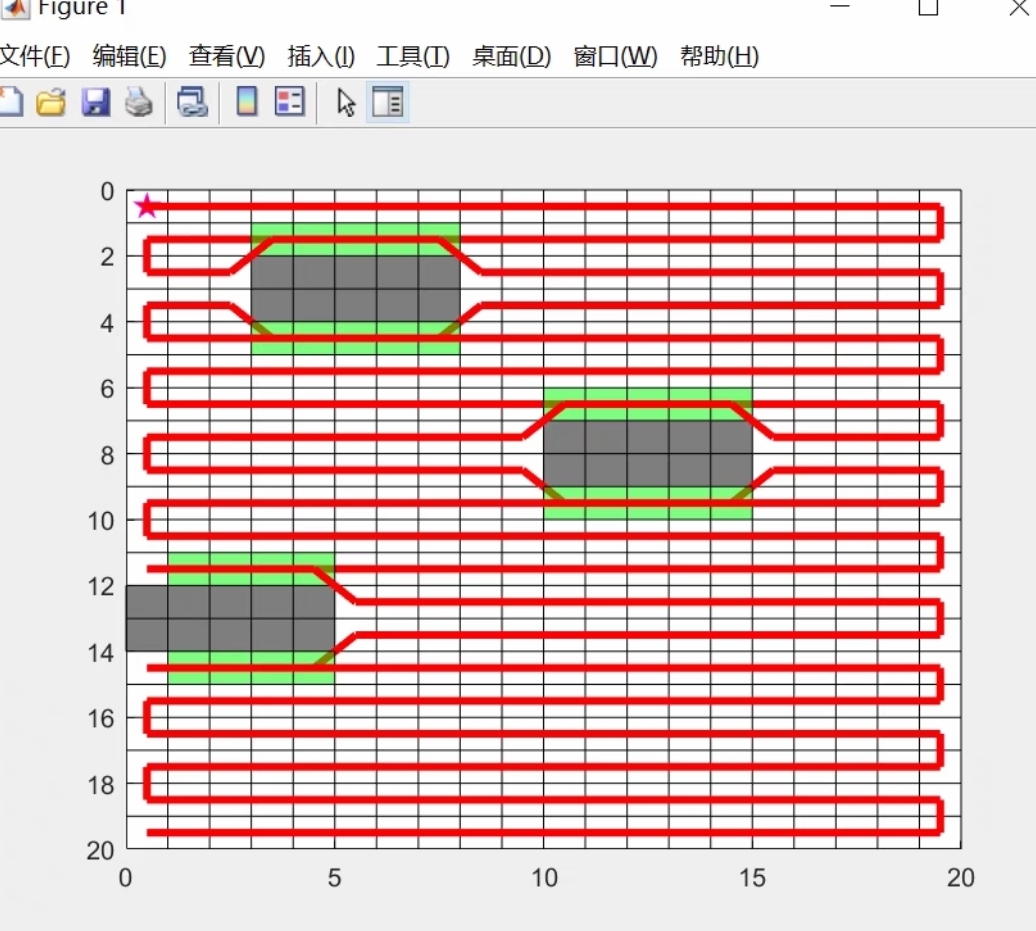
本算法主要通过MATLAB进行仿真验证。首先,建立二维栅格地图,并设置障碍物和起始点。其次,根据定义的优先级运动规则,利用A算法进行全图遍历,寻找最近的未覆盖节点。若节点为障碍物或处于死角位置,则利用A算法逃离,并继续寻找下一个未覆盖节点。最后,绘制全覆盖路径,验证算法的有效性。 -
实验结果与分析
通过利用MATLAB进行仿真验证,本算法能够高效地规划无人机或机器人的往返式全覆盖路径。相较于传统算法,本算法能够避开障碍物和死角位置,保证路径规划的安全性和可行性。实验结果表明,本算法能够成功规划全图路径,并实现全覆盖。 -
结论
本文提出的基于A算法的改进往返式全覆盖路径规划算法,通过引入A算法和建立二维栅格地图,实现避开障碍物和死角位置,保证路径规划的安全性和可行性。结合MATLAB进行仿真验证,证明了算法的有效性和高效性。未来可以进一步优化算法,提高路径规划的自动化程度和鲁棒性,应用于更广泛的领域。
参考文献:无
以上相关代码,程序地址:http://wekup.cn/771158636211.html















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









