







 本文介绍了MPU6050传感器,包括其加速度计和陀螺仪的功能、工作原理,以及如何通过I2C与STM32进行通信,提供初始化设置和数据获取方法。重点在于硬件电路、通信协议和参数配置。
本文介绍了MPU6050传感器,包括其加速度计和陀螺仪的功能、工作原理,以及如何通过I2C与STM32进行通信,提供初始化设置和数据获取方法。重点在于硬件电路、通信协议和参数配置。
简介
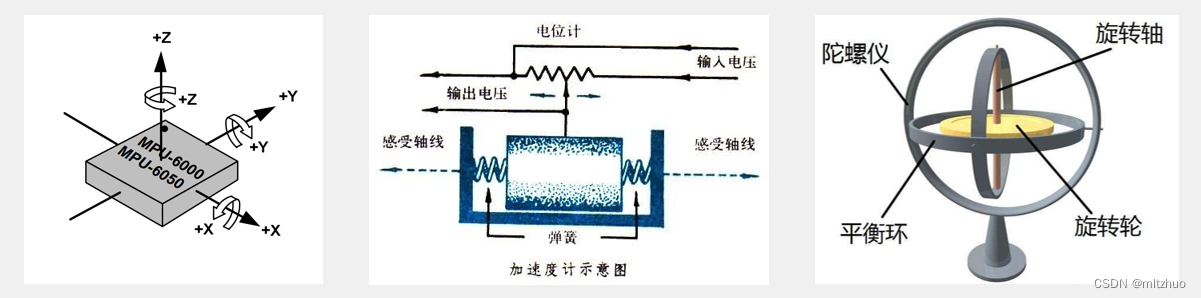
MPU6050是一个6轴姿态传感器,可以测量芯片自身X、Y、Z轴的加速度、角速度参数,通
过数据融合,可进一步得到姿态角(欧拉角),常应用于平衡车、飞行器等需要检测自身姿态的场景
3轴加速度计(Accelerometer):测量X、Y、Z轴的加速度(具有静态稳定性,不具有动态稳定性)
3轴陀螺仪传感器(Gyroscope):测量X、Y、Z轴的角速度(角速度积分得到角度。具有动态稳定性,不具有静态稳定性)
6轴:3加速度,3角速度
9轴:3加速度,3角速度, 3磁场
10轴:3加速度,3角速度, 3磁场, 1气压强度(海拔:海报越高气压越低)
参数
16
位
ADC
采集传感器的模拟信号,量化范围:
-32768~32767(2^15=32768)
运动比较剧烈,选大量程。不然小量程
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 15万+
15万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









