





首先给树莓派接上显示器,键盘,鼠标,电源。
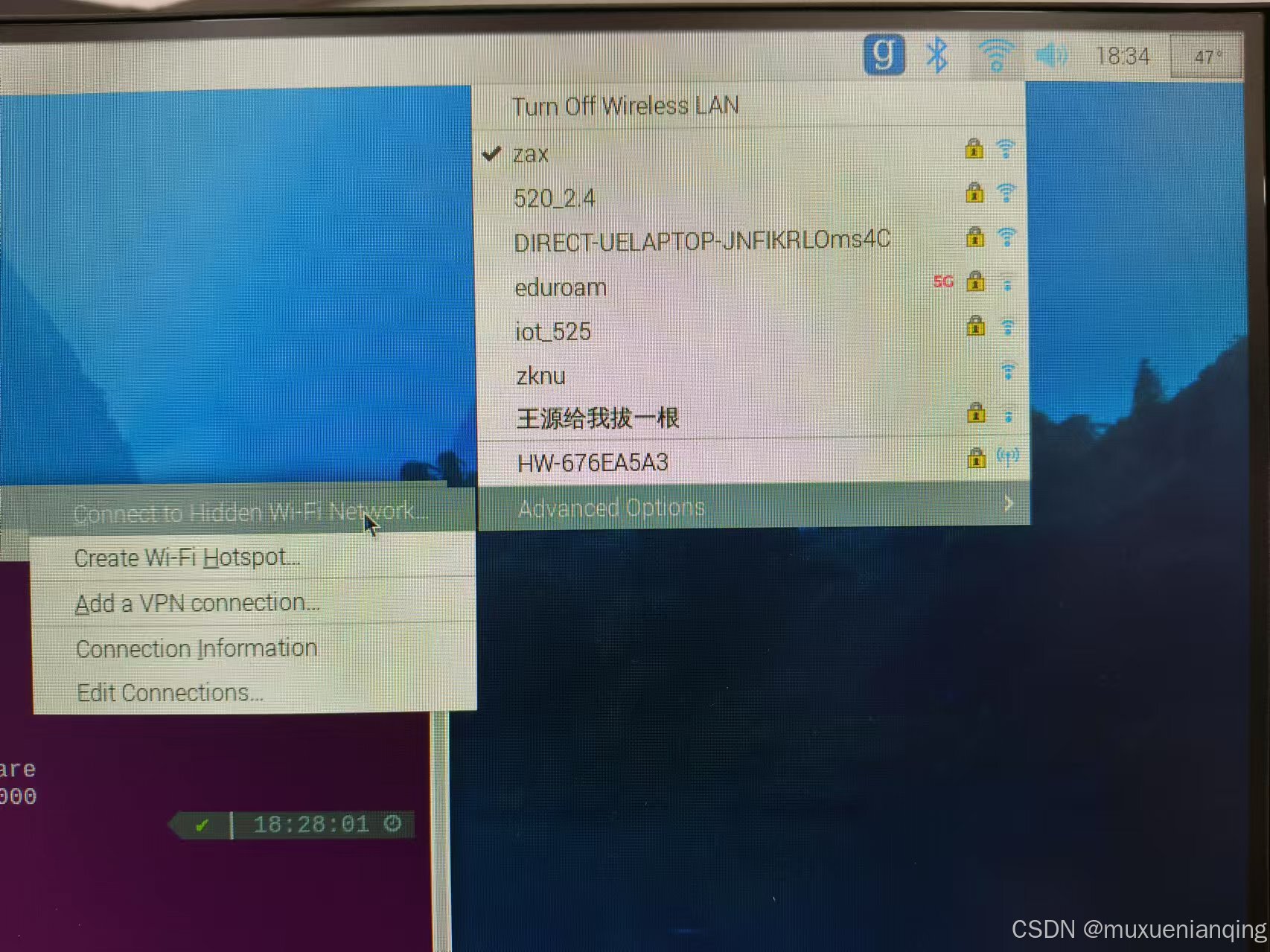
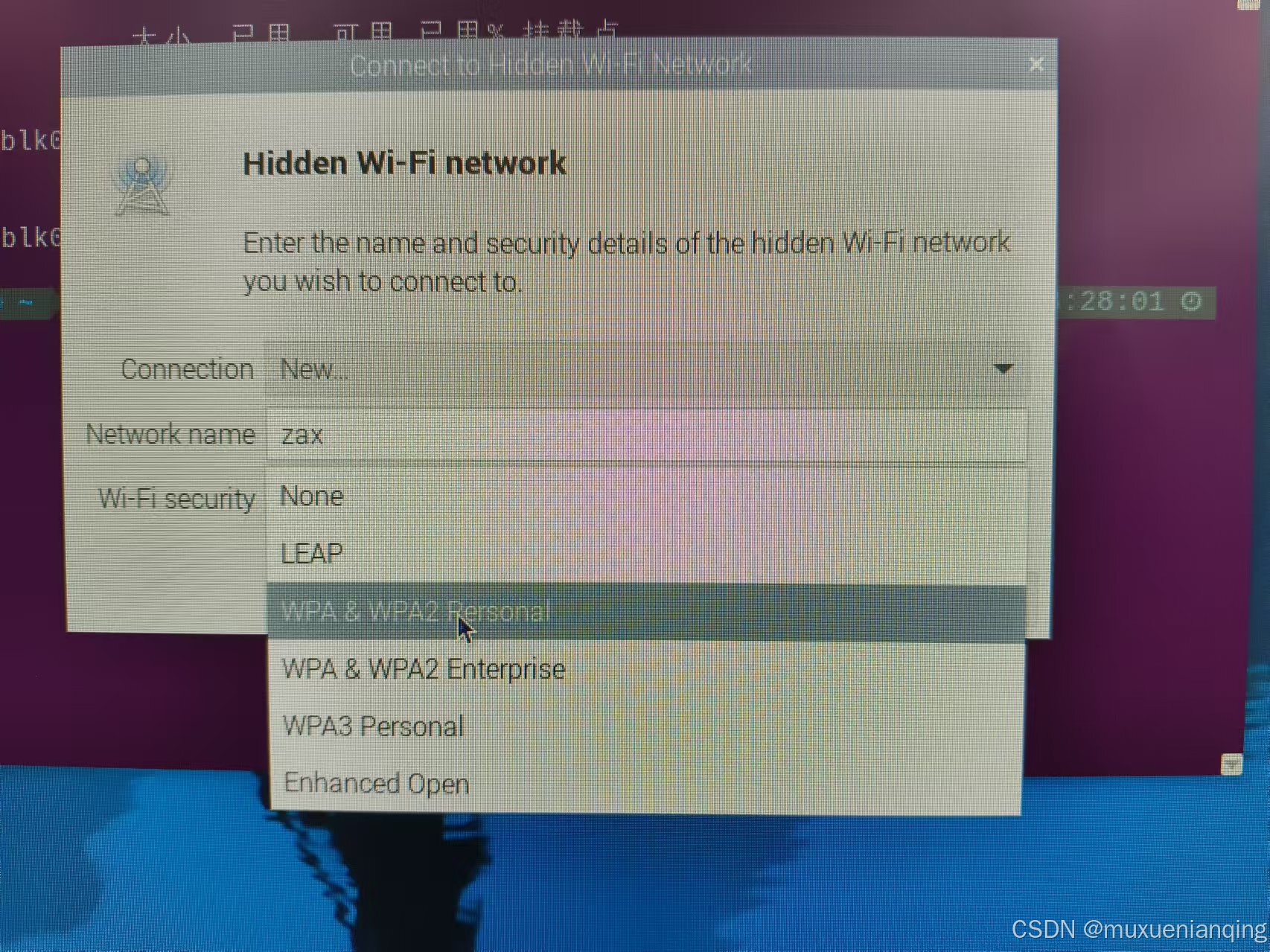
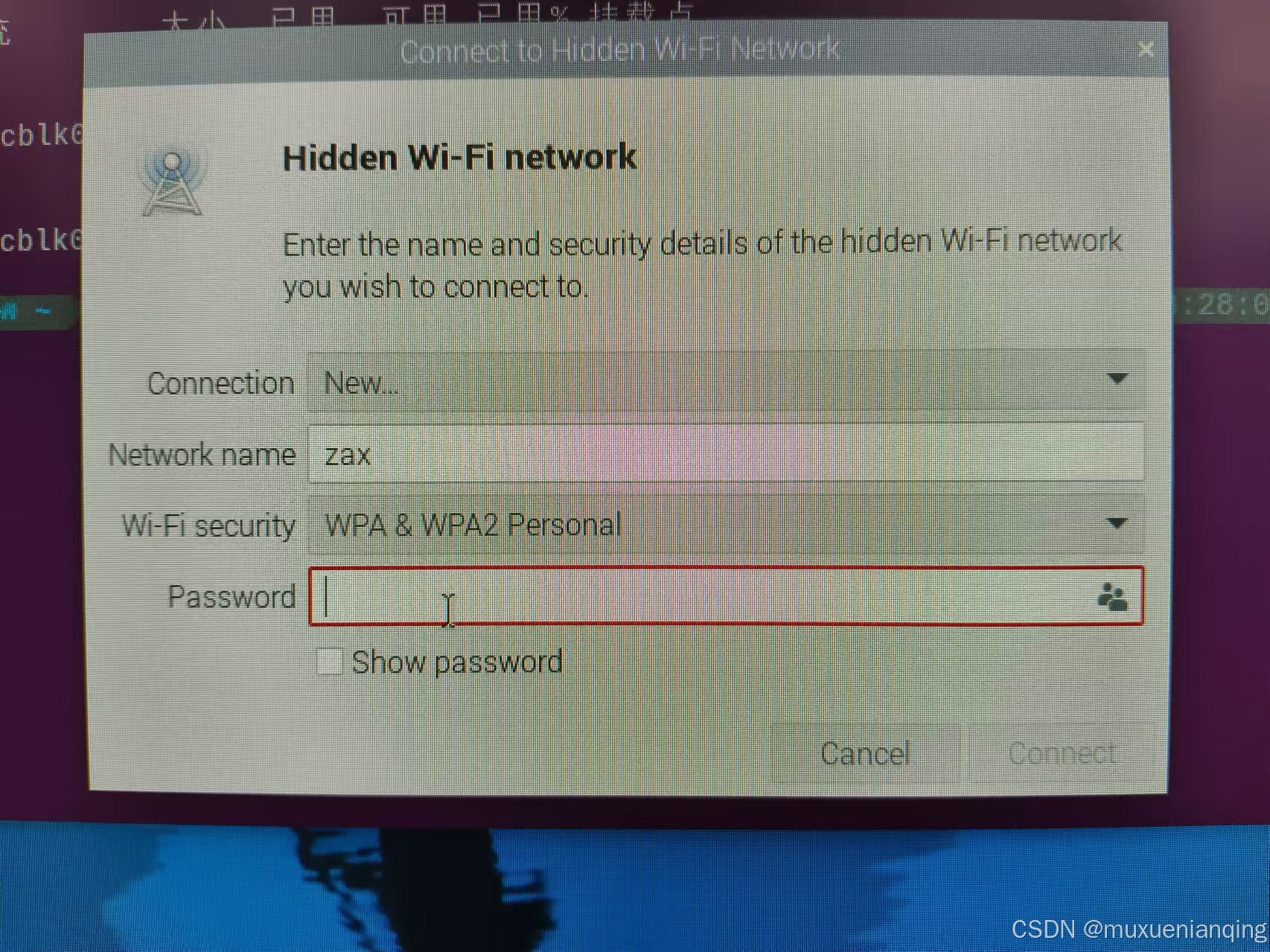
做好准备工作后,打开无线网络开关,先让树莓派连接手机热点
连接好手机热点后,输入hostname -I 查看分配给树莓派的ip
再给电脑连接手机热点。
这样就能确保树莓派和电脑在同一局域网下,使用树莓派的ip就可以进行远程连接和文件传输。

首先给树莓派接上显示器,键盘,鼠标,电源。
做好准备工作后,打开无线网络开关,先让树莓派连接手机热点
连接好手机热点后,输入hostname -I 查看分配给树莓派的ip
再给电脑连接手机热点。
这样就能确保树莓派和电脑在同一局域网下,使用树莓派的ip就可以进行远程连接和文件传输。
 1866
1866

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























