







海康摄像头不支持在嵌入式arm Linux上的开发,如果想使用,可以使用标准协议的,ONVIF、RTSP、ISAPI等
官方sdk下载和体验

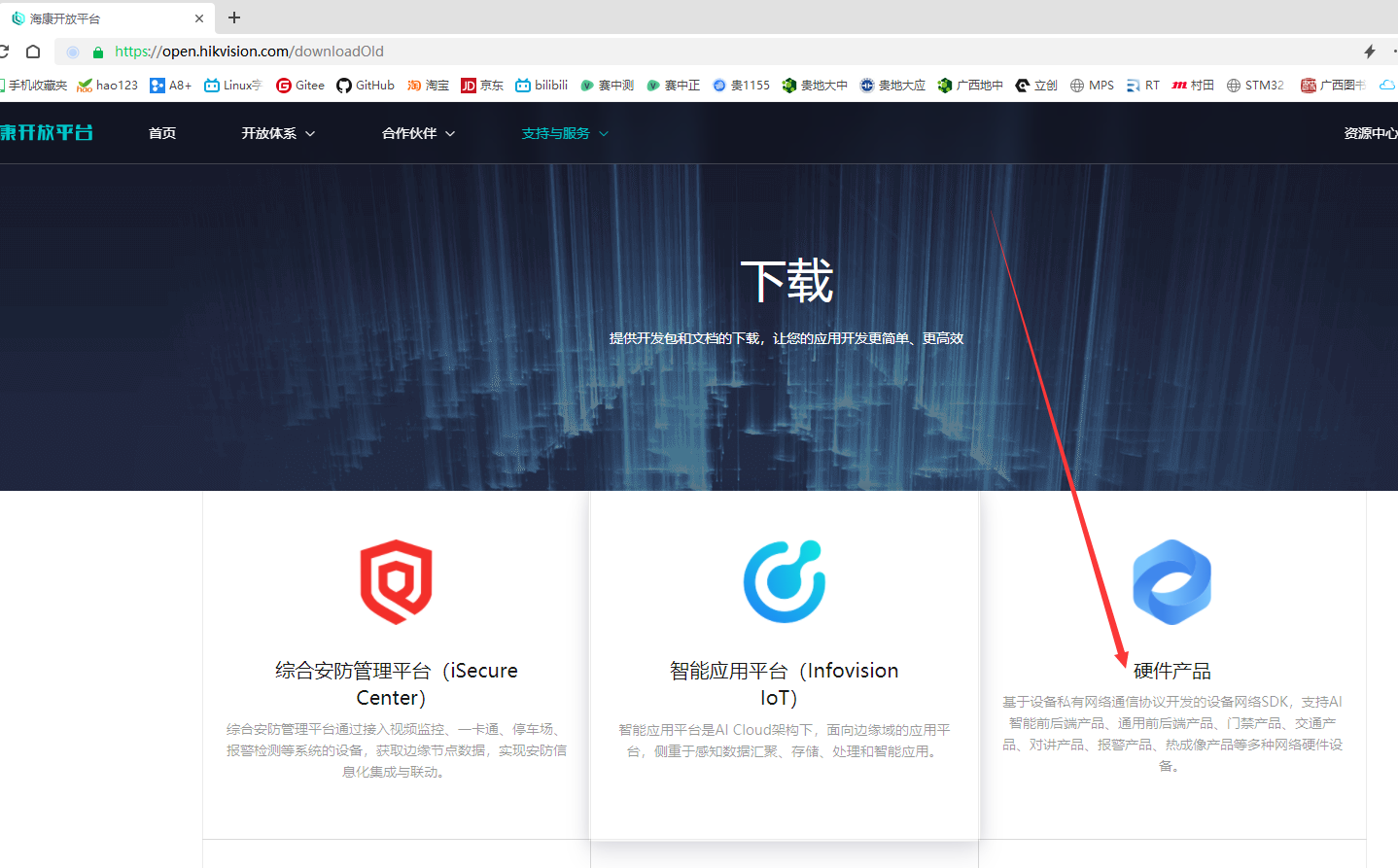
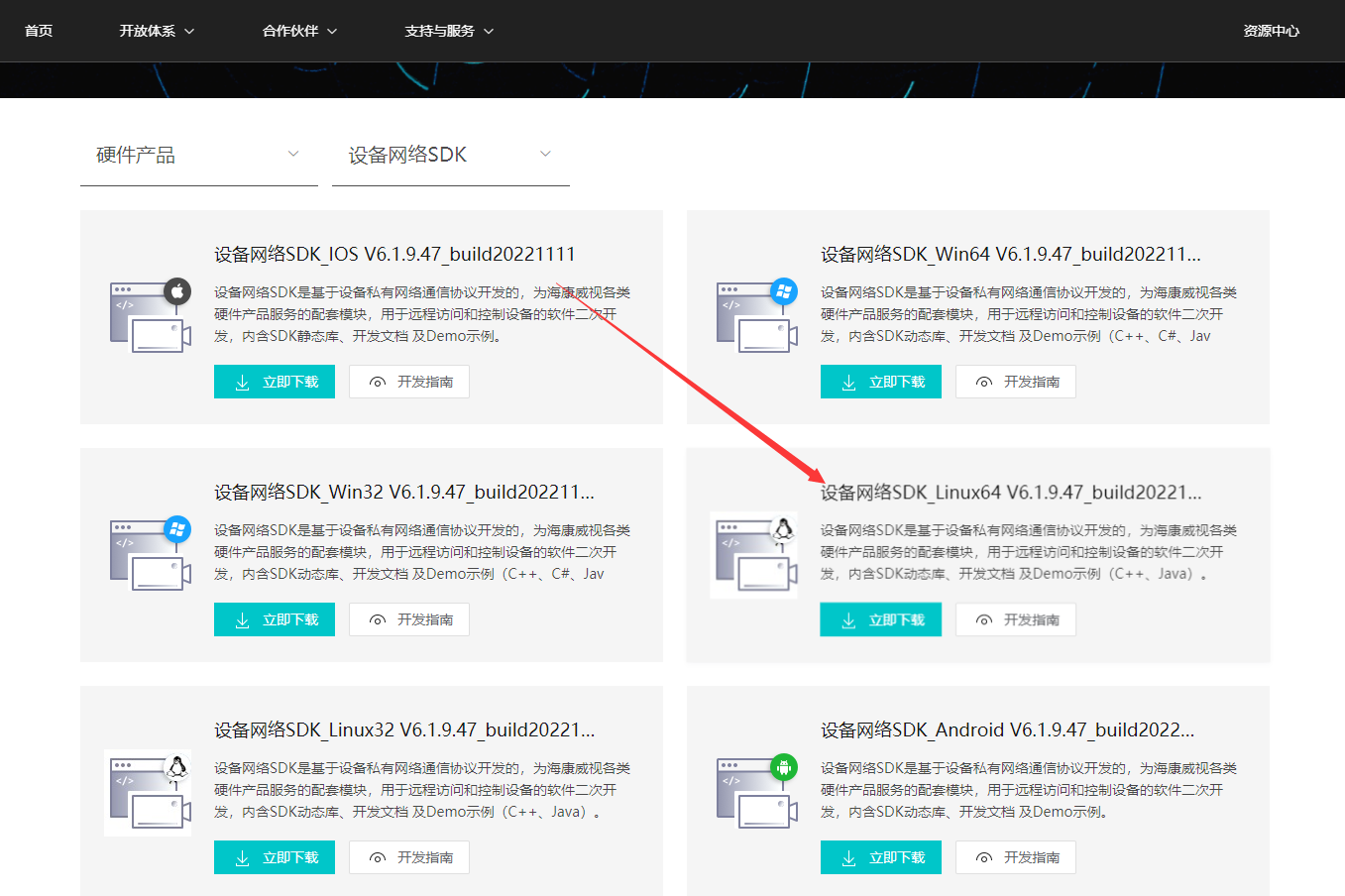
点击下载就行了
Ubuntu摄像头抓拍测试
我们使用Linux64 纯净版测试
接好海康摄像头,通电,并设置号ip和用户名、密码。如果有现成的,可以去查一下就知道了
先把设备下载的文件解压并放到Ubuntu下面,随便丢一个文件夹
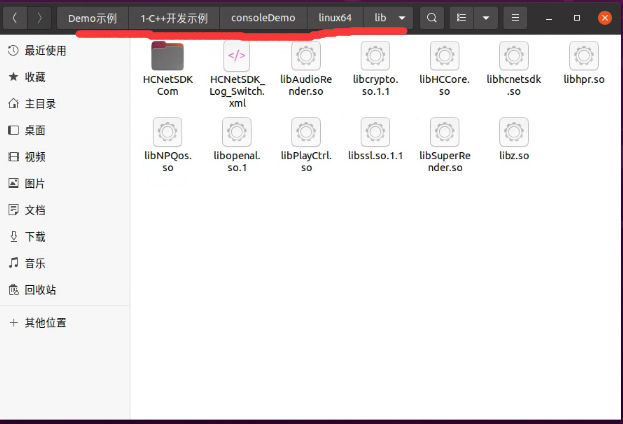
点击进去文件夹中,找到库文件,打开库文件把里面所有的文件全部复制到文件夹
Demo示例/1-C++开发示例/consoleDemo/linux64/lib中

复制完后如下图所示
其他说明:我们只测试纯净版的,不搞其他版本的,其他版本的我也不知道怎么搞,有兴趣可以自己搞搞看看
打开vscode,打开文件夹Demo示例/1-C++开发示例/consoleDemo
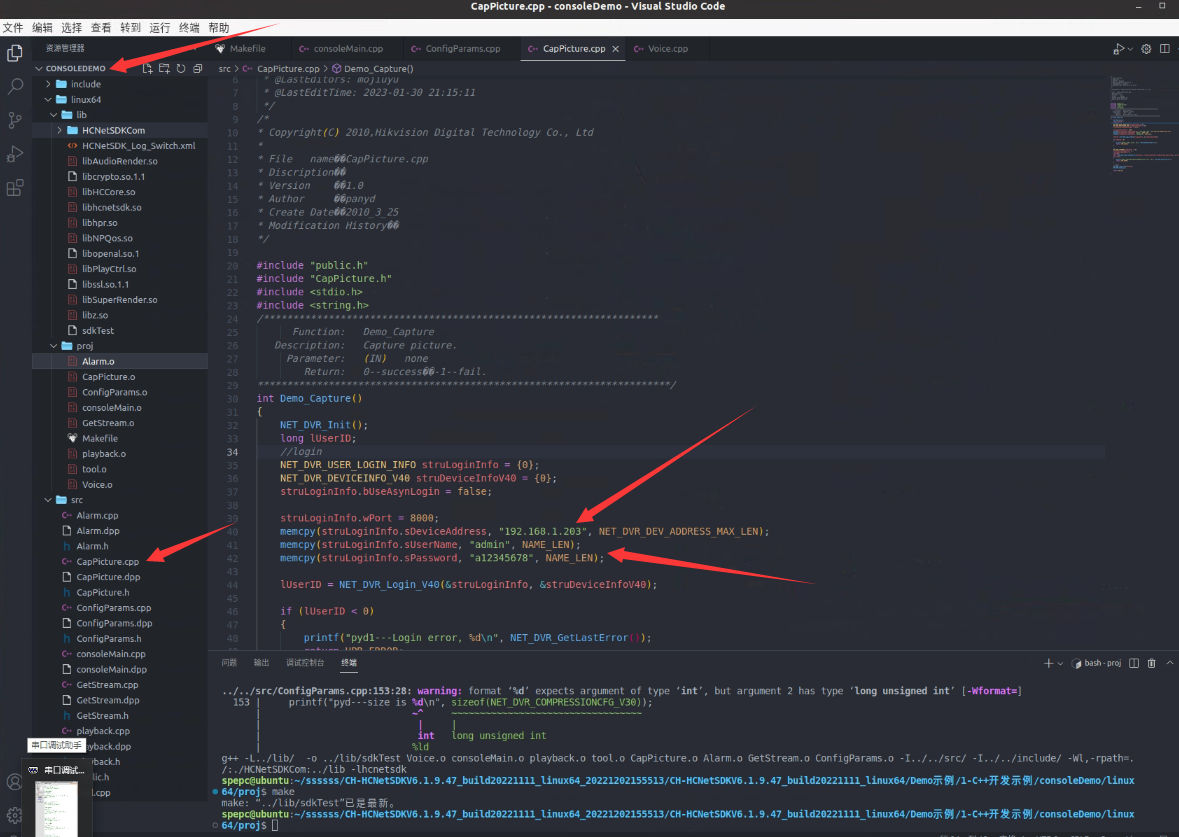
在1-C++开发示例/consoleDemo/src文件夹中找到文件:CapPicture.cpp文件,修改文件内部的ip和用户名、密码这三个东西,这三个参数可以根据自己的摄像头进行设置。
进入文件夹1-C++开发示例/consoleDemo/linux64/proj,打开终端,输入
make
编译成功
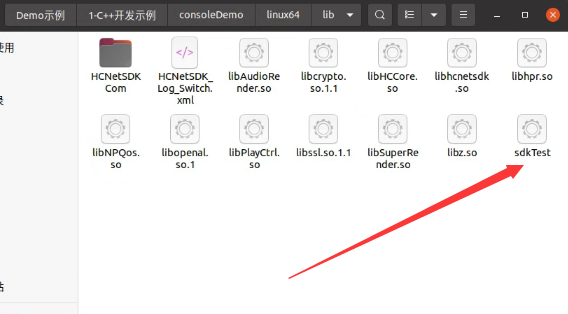
我们可以在1-C++开发示例/consoleDemo/linux64/lib文件夹中找到生成的sdkTest可执行文件。
在终端执行这个文件
./sdkTest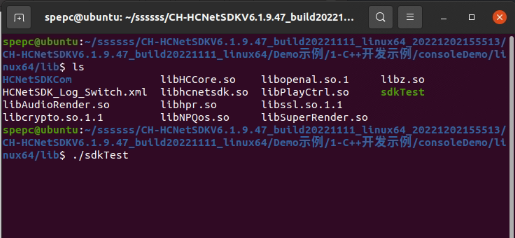
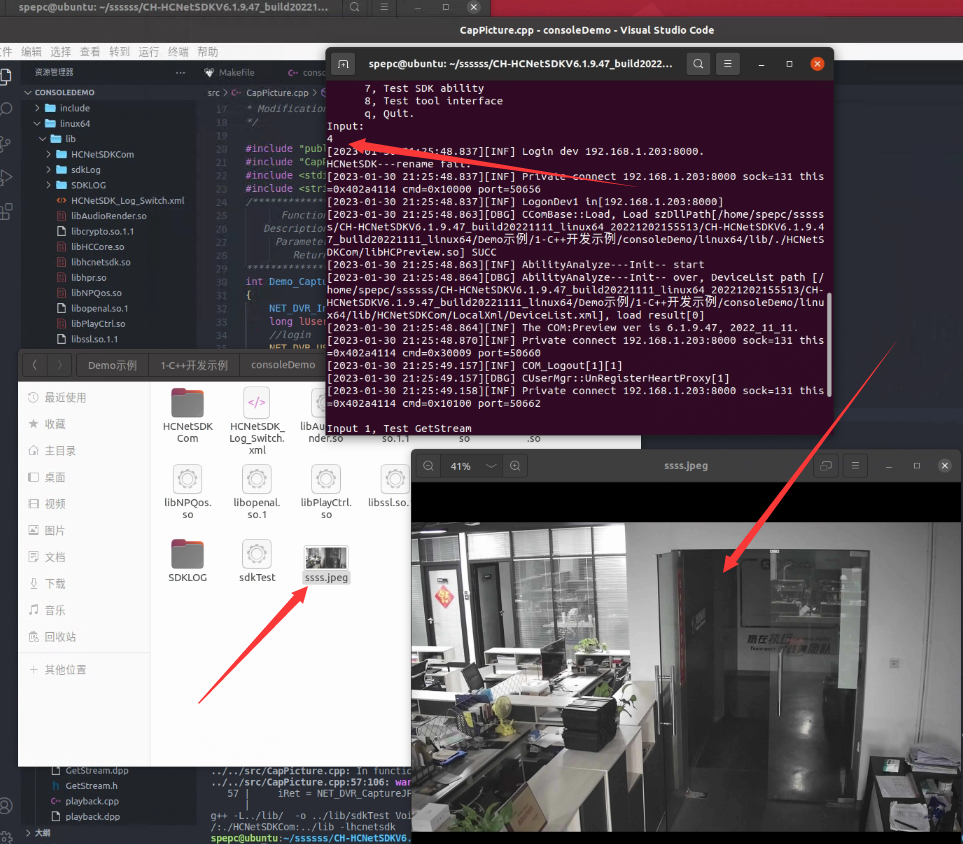
执行后得到下面的东西,根据提示,我们想抓取摄像头的照片,输入4,回车
4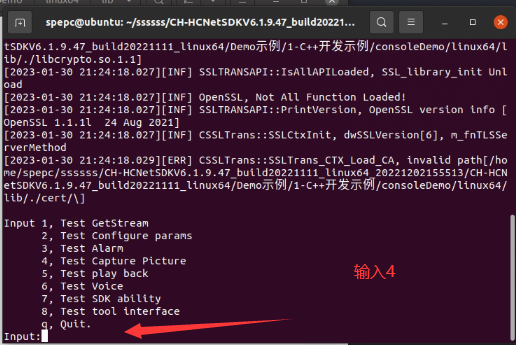
图片获取成功,图片存在lib文件夹中
下面准备在嵌入式上搞搞rtsp

















 934
934

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









