






 本文详细介绍了3线SPI与4线SPI的区别,包括连接线数、时序图和配置流程。特别针对STM32F103C8T6的3线SPI配置进行了说明,以及注意事项和官方ST控制寄存器配置。
本文详细介绍了3线SPI与4线SPI的区别,包括连接线数、时序图和配置流程。特别针对STM32F103C8T6的3线SPI配置进行了说明,以及注意事项和官方ST控制寄存器配置。
文章目录
stm32的3线SPI介绍、调试、使用
概要
3线SPI的使用
最近在调单片机通信的时候需要使用到3线的SPI,但是这个协议用的太少网上基本找不到使用范例,所以我在自己调通了之后编写了本篇教程。
3线SPI与4线SPI的区别简介
一、3线和4线SPI的不同点
首先先从4线SPI的通信讲起,4线SPI的教程网上一大堆,这里就不赘述了,直接百度即可。
这里讲4线和3线的区别。
1. 连接
4线SPI的4根连接线
(括号内是不同的叫法,都是指同一根线)
CS(SENB,片选)
CLK(时钟线,CSK)
MOSI(主出从进,master out slave in)
MISO(主进从出,master in slave out)
主就是我们的主控,从就是我们的从设备。这边手边正好有一颗SH3001陀螺仪同时支持3线和4线SPI,所以将其作为本次教程的教学用具。
3线SPI的3根连接线
CS(SENB,片选)
CLK(时钟线,CSK)
MOSI(信号线) 在4线中这根作为主出从进单工通信,但是3线中可以双向通信(半双工)
2. 时序图
4线SPI时序图
首先是写读时序图,关于这个时序图网上也有很多教程,这边简要介绍一下
CSB为CS片选线,SCK为时钟线,SDI是MOSI,SDO是MISO。
这里的SDI和SDO称呼也是根据设备描述来的,我这个SD IN,缩写SDI,SDO为SD OUT的缩写,SD可以理解为设备端。
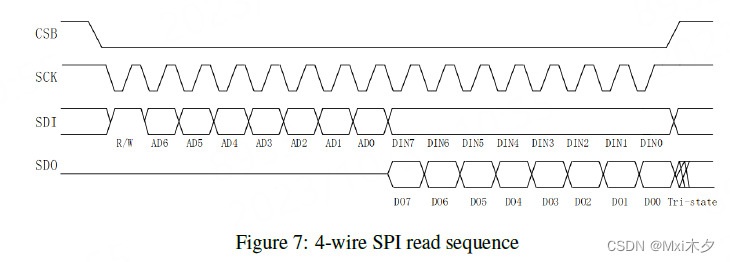
相信经常调SPI的伙伴对这个图很熟悉这里就不展开讲了,如果4线SPI不熟悉的小伙伴可以去寻找4线SPI的教程(非常多)
3线SPI时序图
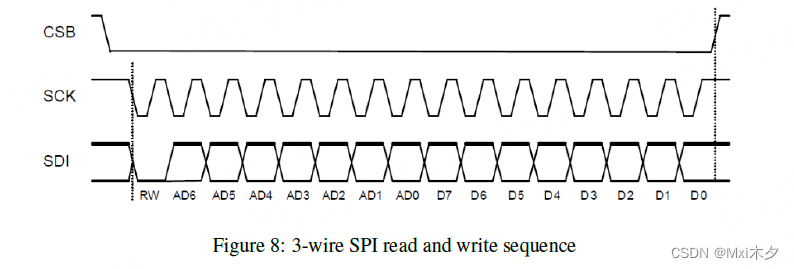 这里只放出了读取数据的时序图(写数据的时候3线和4线SPI的时序图是一样的)
这里只放出了读取数据的时序图(写数据的时候3线和4线SPI的时序图是一样的)
观察这个3线和4线的时序图,可以看到,只是将全双工的两根线合在了一起变成了半双工的一根线,通俗来讲就是两根数据线的通信合在一根线上了,这样做有优点也有缺点。
优点:
少用一根线,对于小系统IO接口很吃紧,但是IIC速率又打不到需求的系统省下一根线。
缺点:
在数据线输出与输入模式转换的时候需要一定的时间来转换(时间短,约3us),作为对比,这里给出565K SPI的时钟线高低电平时间:850ns,也就是约3个半时钟调线,在更高速的SPI中可能会有影响(2M,5M,10M时钟线)
接下来讲解如何配置这样的3线SPI
配置流程
使用的主控为STM32F103C8T6,使用ST官方提供的CUBEMX来配置3线SPI。
配置过程与4线SPI的配置过程大致相同,具体可以参考这篇教程
http://t.csdnimg.cn/ZjjTL(若侵删)
这里介绍一下不同点:
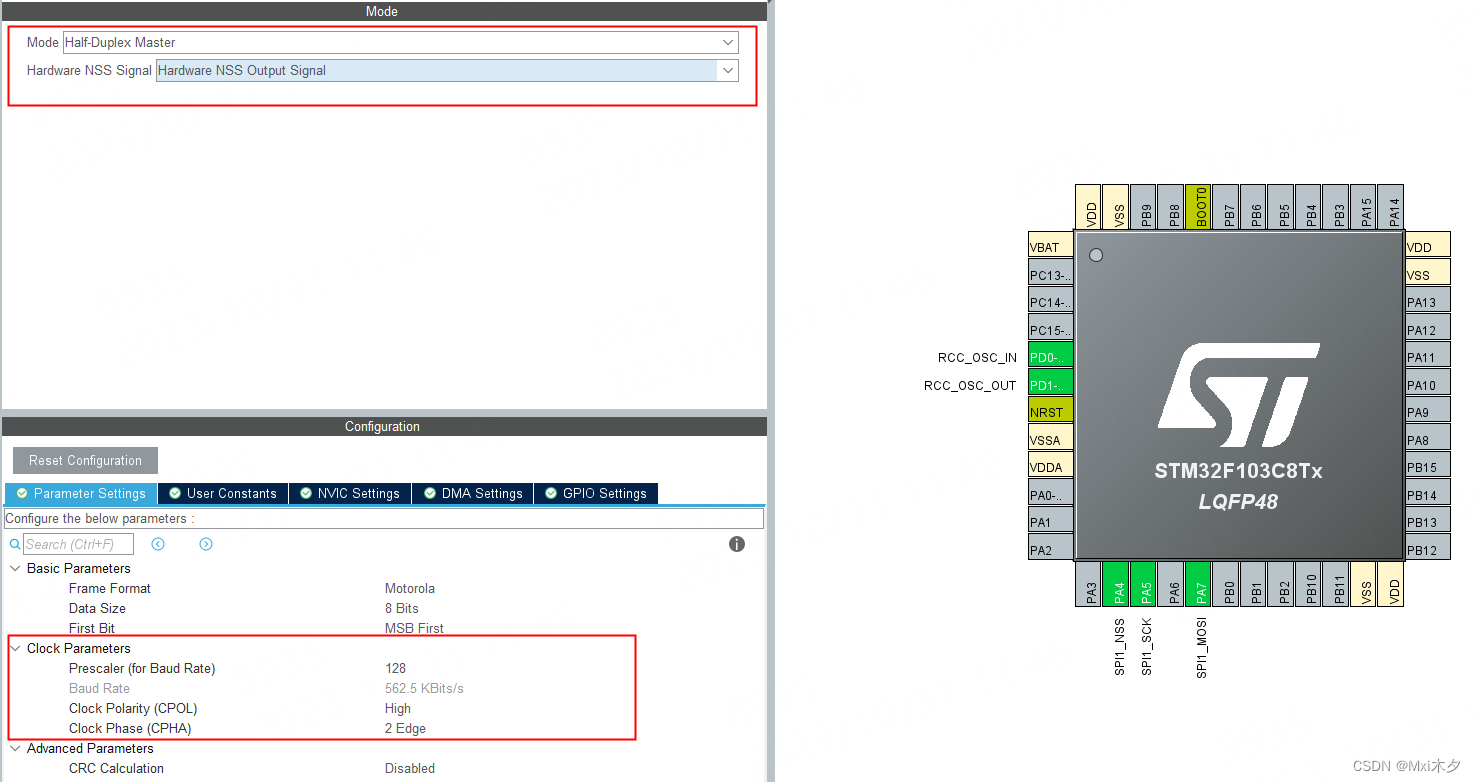
MODE的位置选择半双工主,下面的CPOL和CPHA是选择模式的,一共有4个模式(00,01,10,11)我选择的这个设备SH3001只支持00和11模式,我观察我这里的板载电路,时钟线和数据线都有上拉2.2K的电阻,所以只能使用11模式(SCK时钟线默认高电平,使用时钟的第二个跳变沿),对比介绍一下,00模式就是SCK时钟线默认低电平,第一个跳边沿。
配置好之后就可以去看代码了。
(CUBEMX输出的代码和我贴的代码有些区别,注意配置的内容,我手动修改了一些代码)
//SPI的初始化函数
//速率调节
/***************************************************************************
you can change SPI speed by motified variable SPI_BAUDRATEPRESCALER_128
SPI_BAUDRATEPRESCALER_2 nonsupport
SPI_BAUDRATEPRESCALER_4 18MBits/s
SPI_BAUDRATEPRESCALER_8 9MBits/s
SPI_BAUDRATEPRESCALER_16 4.5MBit/s
SPI_BAUDRATEPRESCALER_32 2.25MBit/s
SPI_BAUDRATEPRESCALER_64 1.125MBit/s
SPI_BAUDRATEPRESCALER_128 562.5KBits/s (default)
SPI_BAUDRATEPRESCALER_256 281.25KBits/s
**4-wire-SPI can use all speed config
**3-wire-SPI can only chose 128 or 256
*****************************************************************************/
void MX_SPI1_Init(void)
{
hspi1.Instance = SPI1;//使用SPI1接口
hspi1.Init.Mode = SPI_MODE_MASTER;//SPI使用的MODE
hspi1.Init.Direction = SPI_DIRECTION_1LINE;//SPI使用的数据线数量(这里就是3线和4线的区别点)
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;//SPI的数据位,可选8bit和16bit
hspi1.Init.CLKPolarity = SPI_POLARITY_HIGH;//时钟线默认高
hspi1.Init.CLKPhase = SPI_PHASE_2EDGE;//时钟线第二个跳边沿开始计(这两行代码是11模式)
hspi1.Init.NSS = SPI_NSS_SOFT;//配出来是HARD,但是我手动把它换成了SOFT,方便自己配置
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_128;//分频率,对应不同的SPI速率,不同芯片不同
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;//高位在前
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi1.Init.CRCPolynomial = 7;//CRC计算的校准系数,这里推荐单数
if (HAL_SPI_Init(&hspi1) != HAL_OK)
{
Error_Handler();
}
}

这是里面配置函数的部分描述
//GPIO的配置代码
void HAL_SPI_MspInit(SPI_HandleTypeDef* spiHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(spiHandle->Instance==SPI1)
{
/* SPI1 clock enable */
__HAL_RCC_SPI1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**SPI1 GPIO Configuration
PA4 ------> SPI1_NSS
PA5 ------> SPI1_SCK
PA6 ------> SPI1_MISO
PA7 ------> SPI1_MOSI
*/
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = SPI_CS_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
}
这两个就是SPI的配置和GPIO初始化代码,跟随CUBEMX的流程走完之后直接进入工程看看(双击20kb的工程文件)

观察SPI.c文件,里面只有初始化,并没有通信协议的代码,我们需要去库里面寻找通讯协议接口并将其复制出来。
在stm32f1xx_hal_spi.c里面有很多spi的接口,这边把需要使用到的3个接口单独介绍:
HAL_SPI_TransmitReceive(主控传收一体,4线SPI使用)
HAL_SPI_Transmit(主控只传出,3线SPI用)
HAL_SPI_Receive (主控只接受,3线SPI用)
接下来就是跟着时序图写通讯协议了。
unsigned char spiTxBuf[256],spiRxBuf[256];
unsigned char SPI3_readNBytes ( unsigned char devAddr,
unsigned char regAddr,
unsigned short readLen,
unsigned char *readBuf)
{
//分页操作,为我选用的这个SH3001特有,实际编写的时候可以把这5行去掉
spiTxBuf[0] = 0x7F;
spiTxBuf[1] = (regAddr > 0x7F) ? 0x01 : 0x00;
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, spiTxBuf, 2, 2);
HAL_GPIO_WritePin( GPIOA,GPIO_PIN_4,GPIO_PIN_SET);
//这里开始是通信协议
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_RESET);//cs拉低
spiTxBuf[0] = regAddr | 0x80;//设备地址|最高位0写1度
HAL_SPI_Transmit( &hspi1, spiTxBuf, 1, 1);//传输1+7地址命令
HAL_SPI_Receive ( &hspi1, readBuf, readLen, readLen);//接受设备返回的数据
HAL_GPIO_WritePin( GPIOA,GPIO_PIN_4,GPIO_PIN_SET); //拉高cs线
return 0;
}
unsigned char SPI3_writeNBytes( unsigned char devAddr,
unsigned char regAddr,
unsigned short writeLen,
unsigned char *writeBuf)
{
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_RESET);//拉低cs线
spiTxBuf[0] = regAddr & 0x7F;//0+7位地址为写命令+设备地址
for (int k = 0;k<writeLen;k++)//将传入的指针内容传入txbuf里面
{
spiTxBuf[k+1] = writeBuf[k];
}
HAL_SPI_Transmit( &hspi1, spiTxBuf, writeLen+1, writeLen+1);//传输数据
HAL_GPIO_WritePin( GPIOA,GPIO_PIN_4,GPIO_PIN_SET);//拉高cs线
return 0;
}
好了,我么可以看通信数据了,这个通信协议传输起来没有问题,可以直接和SH3001进行通信,获取六轴的数据。
协议分析
当然这少不了官方ST给的数据手册描述,这里贴一个图
然后查看我们的SH3001设备的datasheet,里面有一个翻页操作,就是如果检测到7F寄存器是否为1,如果超过7F就需要翻页。
所以我们在传输数据的时候需要做的步骤为:
前提:检查地址是否超过7F,超过7F翻页(调整7F寄存器的值0:第一页1:第二页)
- 拉低CS脚
- 开始时钟跳变并传输数据
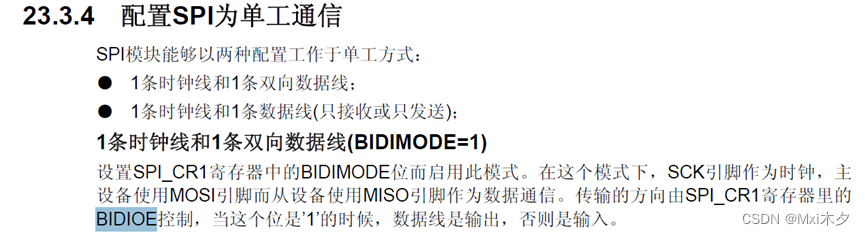
- 调整BIDIMODE为0,开始接受数据
- 接受完数据后拉高CS脚完成通讯
然后查看官方的寄存器描述(主控的)
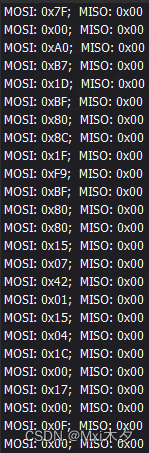
这里使用逻辑分析仪来分析通信代码,可以一一对应上,先放上3线SPI的波形
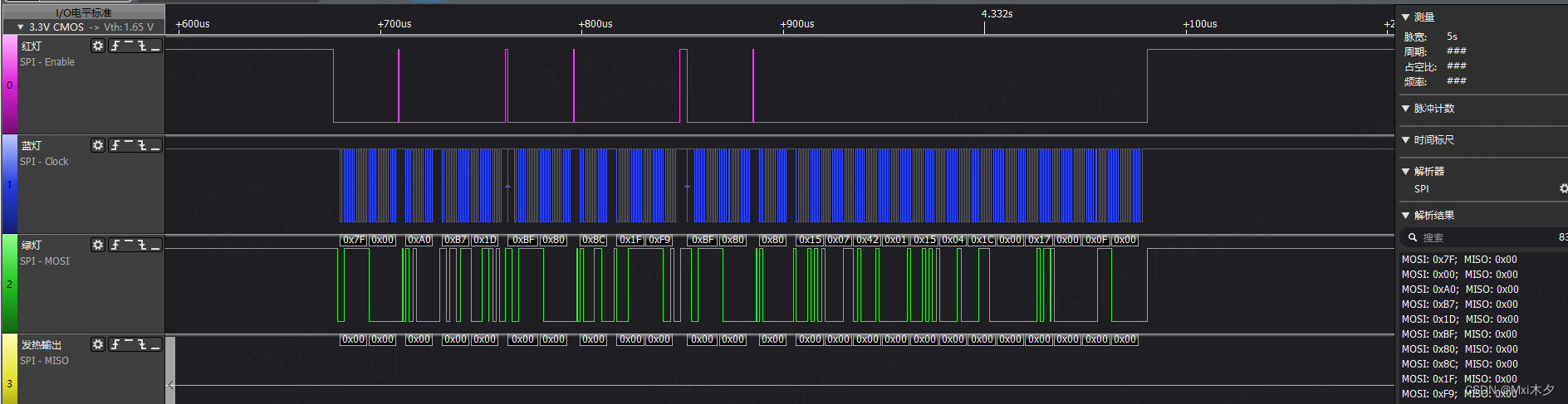
可以看到波形很完美,玩么对应了我们想要的数据
然后是4线SPI的波形,同样的读取命令

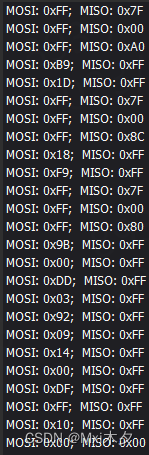
两次读取的时候数据是不同的,所以两次读取的MOSI数据不同,不过MISO的数据都是一样的,也就是主控输出的命令和数据是一样的(逻辑分析仪有日常错位)
注意事项
目前3线SPI因为使用的人非常少,所以有很多bug还没有修,比如逻辑分析仪3线波形图的那一个异常时钟跳动,还有速率调高(分频在64以上,128和256没问题)以后内部会卡资源导致CS片选线提前拉高导致少最后一位数据。
当然这个问题是可以解决的,直接在协议库里面修改库函数的执行流程,将时钟线的执行关闭逻辑往后拉才能进行。或者手动将CS片选线延迟。
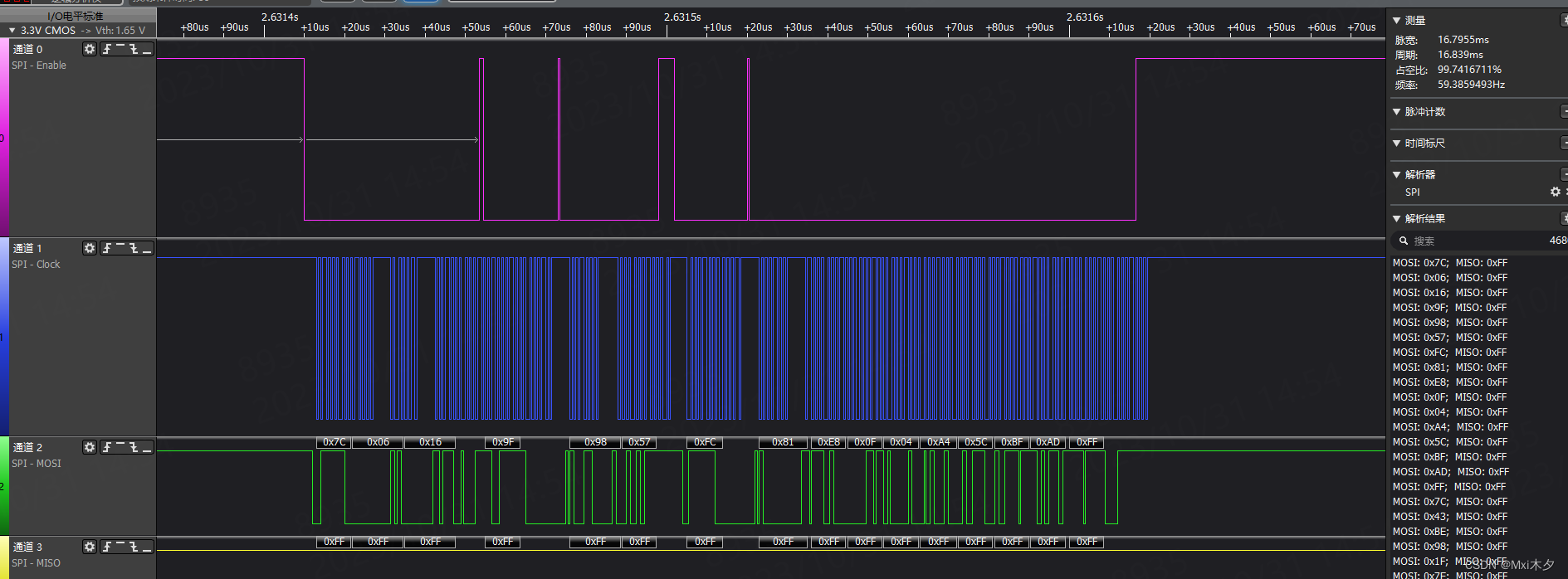
这里测试了一下1M的SPI,中间的片选CS线已经在乱跳了
详细的代码包我就不贴了,公司内部的驱动不能外传,有需要的可以联系我帮忙找销售,不过通讯协议的代码可以贴出来。
没有积分的可以直接取用度盘链接(只有协议不能直接使用,还请自行配置环境后再将协议移植到自己的协议接口)
链接:https://pan.baidu.com/s/12mFJ_Vdw9jnK8Q9tX-SLXA
提取码:zpt3
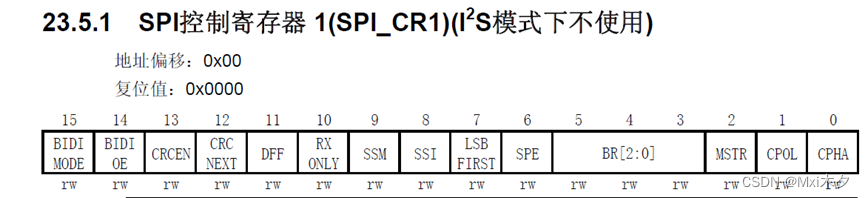
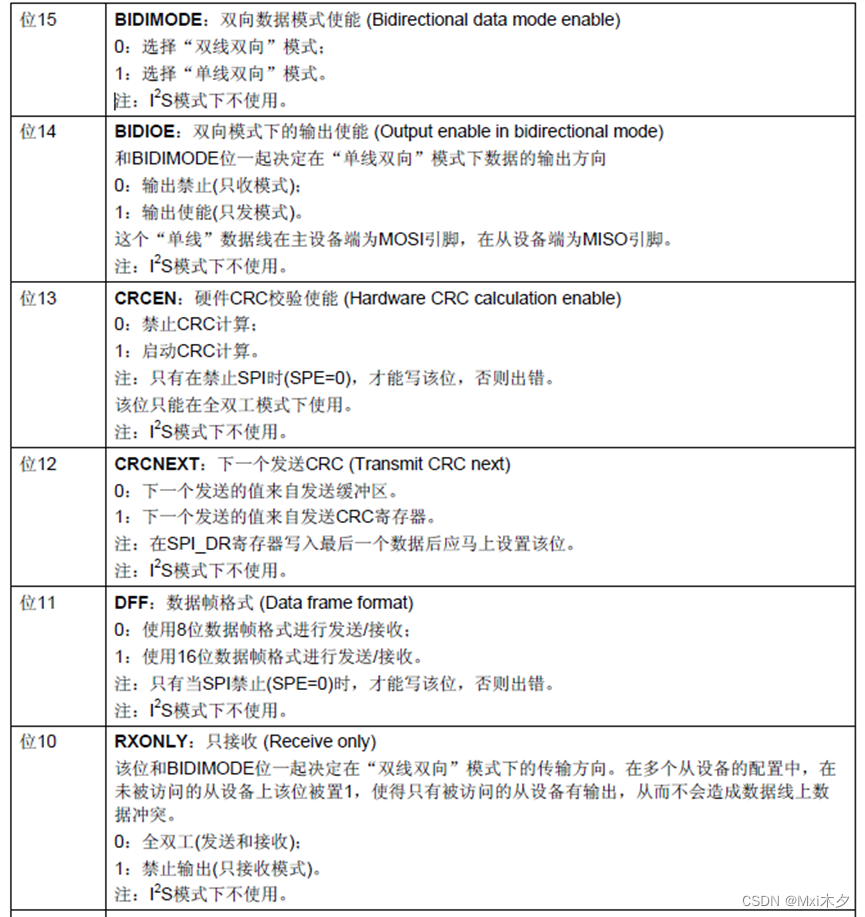
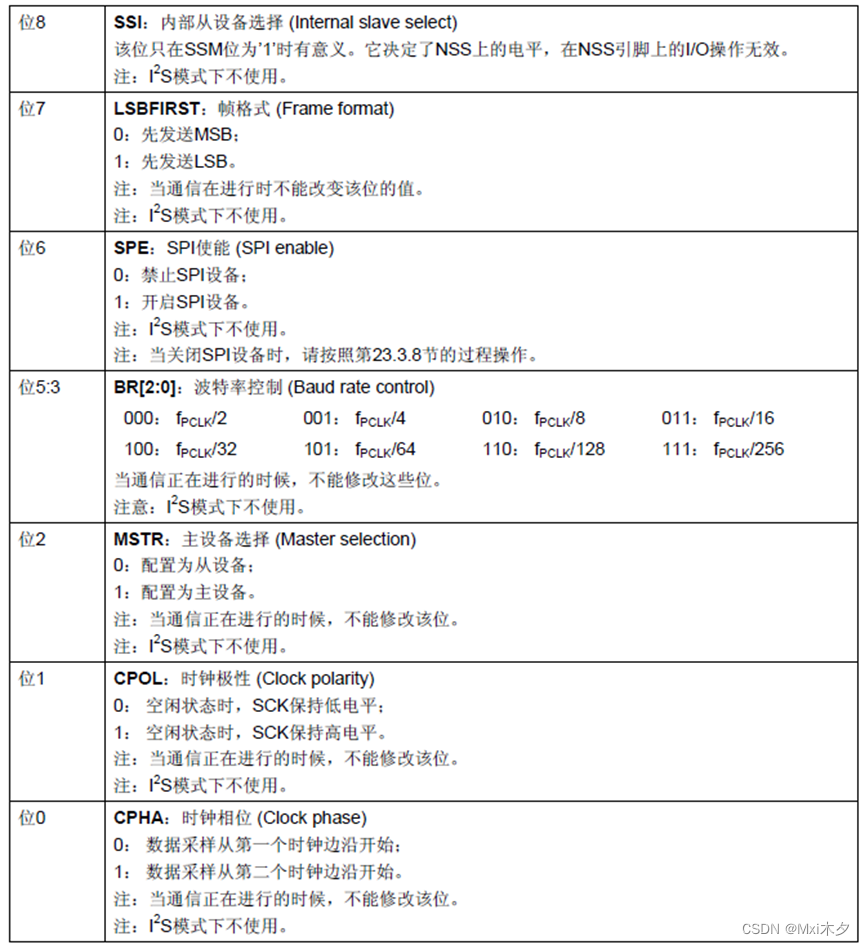
附录 官方ST关于SPI控制寄存器的配置使用


















 1050
1050

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









