







模糊控制器的设计是模糊逻辑中一个最大的应用领域。模糊逻辑经常被描述为使用词而不是数字计算,模糊控制被描述为用句子而非方程来控制。控制被表达为一组语义规则,而不是依据微分方程来描述控制的策略。
1 模糊控制器的部件
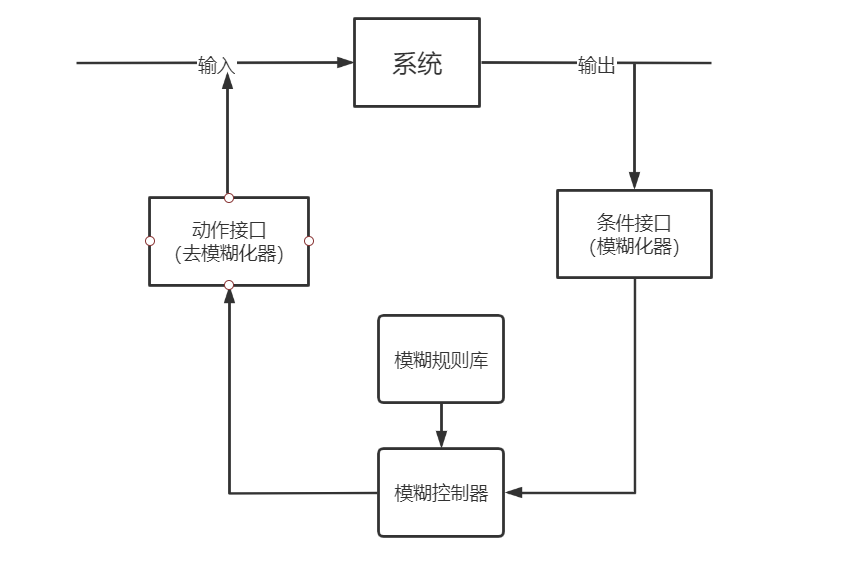
一个控制器被用来控制一些系统或工厂,系统具有一个期望响应,并依据所接收到的输入维持该响应。系统的输入会改变系统的状态,会引起响应的改变,控制器的任务就是通过提供确保期望响应的一组输入来采取修正措施。一个模糊控制器主要包含4个组成部分:
- 模糊规则库:这些规则表达了对系统的一个非线性控制策略。
- 条件接口(模糊化器):接收系统的真实输出,并且将这些非模糊值转换为对应模糊集的隶属度。
- 动作接口(去模糊化器):产生真实控制函数的非模糊值,应用于系统。
- 推理机:在模糊化输入的基础上,进行推理,产生一个模糊输出
也就是说,一个模糊控制器从根本上是一个非线性控制函数。模糊控制器中的非线性通过下面方式引发:
2 模糊控制器的类型
存在着很多不同类型的模糊控制器,区别主要在于推理机和去模糊化器的实现。下面介绍3种类型的控制器
(1)基于表的控制器
这种控制器被用于离散空间。对于有大量输入输出的情形效率不高。
(2)Mamdani模糊控制器
(3)Takagi-Sugeno控制器
运出复杂输出集合,以数学函数的方式提供了一个更为动态的控制。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









